Controlador de soporte de brazo de vehículo de obras públicas, sistema de control para vehículo de obras públicas y procedimiento de control.
Un controlador de pluma de vehículo de obras públicas, que comprende:
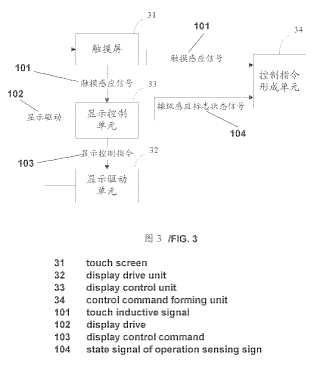
una pantalla táctil que comprende unvisualizador y un sensor táctil, una unidad controladora del visualizador, una unidad de control de visualización y unaunidad de generación de órdenes de control; en el que
la pantalla táctil muestra una marca de detección del accionamiento, detecta un toque exterior y genera una señal dedetección táctil que refleja una posición de un punto de toque sobre la pantalla táctil;
la unidad controladora del visualizador, en respuesta a una orden de control de visualización desde la unidad decontrol de visualización, proporciona unas instrucciones de visualización a la pantalla táctil para controlar uncontenido visualizado en la pantalla táctil, incluyendo el contenido de visualización una forma de la marca dedetección del accionamiento y una posición de la marca de detección del accionamiento sobre la pantalla táctil;la unidad de control de visualización recibe la señal de detección táctil desde la pantalla táctil, obtiene la posición delpunto de toque sobre la pantalla táctil, determina si hay un solape entre la posición del punto de toque y una posiciónactual de la marca de detección del accionamiento, y fija la marca de detección del accionamiento en un estadoactivado si hay un solape entre la posición del punto de toque y la posición actual de la marca de detección delaccionamiento; cuando la marca de detección del accionamiento está en un estado activado, repone la marca dedetección del accionamiento a un estado de reposo si la señal de detección del toque desaparece; cuando la marcade detección del accionamiento está en un estado activado, proporciona la orden de control de visualización a launidad controladora del visualizador, instruyendo la orden de control de visualización a la marca de detección delaccionamiento para visualizarse en la posición del punto de toque indicado por la señal de detección táctil; yla unidad de generación de la orden de control recibe la señal de detección táctil desde la pantalla táctil y una señalde estado de la marca de detección del accionamiento desde la unidad de control de visualización, genera unaorden de control que refleja una velocidad y una dirección de movimiento deseados del extremo de la plumabasándose en la posición del punto de toque sobre la pantalla táctil representado por la señal de detección táctil yuna relación correspondiente predeterminada si la marca de detección del accionamiento está en un estadoactivado, y envía la orden de control a través de cable o por vía inalámbrica.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/CN2010/074237.
Solicitante: Hunan Sany Intelligent Control Equipment Co., Ltd.
Nacionalidad solicitante: China.
Dirección: Sany Industry Town Economic and Technological Development Zone Changsha Hunan 410100 CHINA.
Inventor/es: WU,ZHIYONG, ZHOU,JIHUI, WU,HANQI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › caracterizado por el movimiento de los brazos, p. ej. del tipo coordenadas cartesianas (B25J 9/06 tiene prioridad).
- G05B19/19 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
- G06F3/00 G […] › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › Disposiciones de entrada para la transferencia de datos destinados a ser procesados en una forma utilizable por el computador; Disposiciones de salida para la transferencia de datos desde la unidad de procesamiento a la unidad de salida, p. ej. disposiciones de interfaz.
PDF original: ES-2406258_T3.pdf
Fragmento de la descripción:
Controlador de soporte de brazo de vehículo de obras públicas, sistema de control para vehículo de obras públicas y procedimiento de control
La presente solicitud reivindica la prioridad sobre la Solicitud de Patente China Nº 200910158819.X, titulada “ENGINEERING VEHICLE ARM SUPPORT CONTROLLER, CONTROL SYSTEM, ENGINEERING VEHICLE AND CONTROL METHOD”, presentada en la Oficina de Propiedad Intelectual del Estado Chino el 6 de julio de 2009, que se incorpora en el presente documento por referencia en su totalidad.
Campo de la invención La presente invención se refiere a una técnica para el control de plumas de vehículos de obras públicas, especialmente a un controlador de plumas de vehículos de obras públicas. La presente invención proporciona también un sistema de control de plumas de vehículos de obras públicas que emplea el controlador de plumas de vehículos de obras públicas y un vehículo de obras públicas que emplea el controlador de plumas de vehículos de obras públicas. La presente invención proporciona adicionalmente un procedimiento de control de plumas de vehículos de obras públicas.
Antecedentes de la invención Diversos vehículos de obras públicas tienen plumas. La pluma es un mecanismo de funcionamiento constituido por al menos dos segmentos articulados en secuencia a través de ejes horizontales articulados y cada uno de los segmentos tiene capacidad para girar en un ángulo apropiado alrededor del eje articulado. La pluma como conjunto se fija sobre un bastidor a través de una mesa giratoria, y la pluma accionada por la mesa giratoria puede girar en 360 grados alrededor de un eje vertical, perpendicular al plano horizontal. En general, la pluma se usa como propulsores en proyectos de construcción. Por ejemplo, una pluma para un camión de bombeo de hormigón se utiliza para soportar tuberías de transporte y controlar el recorrido del movimiento de una manguera en el extremo de las tuberías de transporte por medio del movimiento de la pluma, de modo que el hormigón se pueda bombear a las posiciones deseadas. En consecuencia, el control del movimiento de la pluma del camión de bombeo de hormigón, que principalmente es el control del recorrido del movimiento del extremo de la pluma, es muy importante para la implementación de los requisitos de construcción.
La Fig. 1 muestra una vista estructural de un camión de bombeo de hormigón típico con una pluma de cuatro segmentos. El camión de bombeo incluye una mesa giratoria 1, segmentos 2, cilindros hidráulicos 3 para el control de los segmentos 2 que giran con relación a los otros segmentos, barras de conexión 4 para la conexión de los segmentos adyacentes y accesorios. El camión de bombeo mostrado en la Fig. 1 incluye cuatro segmentos 2, y en correspondencia incluye cuatro cilindros hidráulicos 3 y tres barras de conexión 4.
La mesa giratoria 1 conecta la pluma 2 y el chasis del camión de bombeo. La mesa giratoria 1 se controla para que gire en el sentido de las agujas del reloj o en sentido contrario de modo que gire la pluma completa. El plegado y despliegue de cada segmento 2 se lleva a cabo mediante el cilindro hidráulico 3 correspondiente. Mediante el control del caudal de aceite hidráulico en cada cilindro hidráulico 3, se puede controlar la velocidad de movimiento del segmento 2 correspondiente, y de ese modo se puede controlar el recorrido del movimiento del extremo de la pluma.
La Fig. 2 es un diagrama estructural del sistema de control para una pluma de un camión de bombeo de hormigón en la técnica anterior.
El sistema de control incluye un mando a distancia 11, un sensor de la pluma 12, un receptor 13, un controlador 14 y un mecanismo de accionamiento 15.
El mando a distancia 11 recibe una cantidad de control proporcionada por un operador, y envía la cantidad de control recibida al receptor 13 por vía inalámbrica o mediante cable. En la técnica anterior, el mando a distancia 11 emplea una empuñadura de control esférica para realizar el proceso de control.
Los sensores de la pluma 12 incluyen varios sensores que reflejan el estado actual de la pluma y obtienen parámetros del estado en tiempo real de la pluma mediante su detección, en los que el parámetro de estado en tiempo real principal es la posición espacial de cada segmento de la pluma. Normalmente, la posición espacial de cada segmento se detecta mediante sensores de ángulo montados en la cabeza de cada segmento 2 y se montan entre la pluma y la mesa giratoria.
El receptor 13 recoge la cantidad de control del mando a distancia 11 y los parámetros de estado en tiempo real de los sensores de la pluma 12 y los envía al controlador 14.
Basándose en la orden de control y a los parámetros de estado en tiempo real desde el receptor 13, el controlador 14 calcula un valor de la orden de control correspondiente a cada cilindro hidráulico 3 a través de un algoritmo de control predeterminado, y los envía al mecanismo de accionamiento 15.
El mecanismo de accionamiento 15, de acuerdo con el valor de la orden de control recibida, suministra a cada cilindro hidráulico 3 una corriente de accionamiento o voltaje de accionamiento correspondiente al comando de control.
Durante el proceso de control de la pluma del camión de bombeo que emplea el dispositivo de control anteriormente mencionado, el operador acciona la empuñadura de control esférica del mando a distancia 11 para controlar el movimiento del extremo de la pluma. Comúnmente, la dirección de inclinación de la empuñadura de control representa la dirección de movimiento deseada del extremo de la pluma, y la magnitud del ángulo de inclinación representa la velocidad de movimiento deseada del extremo de la pluma. El operador determina visualmente con la experiencia personal la posición deseada del extremo de la pluma, y controla la pluma para que se mueva a la posición deseada mediante el accionamiento de la empuñadura del mando a distancia 11.
Durante el funcionamiento remoto que emplea el mando a distancia 11 anteriormente mencionado con una empuñadura de control, la empuñadura de control esférica es difícil de controlar y el intervalo ajustable de su ángulo de inclinación es limitado, y el intervalo de variación de la velocidad de movimiento del extremo de la pluma es más amplio, esto es, la variación limitada del ángulo de inclinación de la empuñadura de control necesita corresponderse al intervalo de variación de amplitud de la velocidad de movimiento del extremo de la pluma, lo que da como resultado que la sensibilidad de la empuñadura de control sea demasiado alta para ajustar la velocidad del movimiento del extremo de la pluma con precisión. Junto a esto, es difícil también controlar con precisión la dirección de inclinación de la empuñadura esférica, lo que hace también difícil controlar con precisión la dirección de movimiento del extremo de la pluma.
Sumario de la invención A la vista de las desventajas descritas anteriormente, la presente invención proporciona un controlador de pluma de vehículo de obras públicas que proporciona dispositivos de funcionamiento más adecuados que pueden reflejar la intención del accionamiento de un operador con más precisión, de modo que se consiga el control preciso del ángulo de movimiento y de la velocidad de movimiento del extremo de una pluma. La presente invención proporciona adicionalmente un sistema de control de pluma de vehículos de obras públicas que comprende el controlador de pluma de vehículo de obras públicas, un vehículo de obras públicas que comprende el sistema de control de plumas de vehículos de obras públicas y un procedimiento de control de plumas de vehículos de obras públicas.
La presente invención proporciona un controlador de plumas de vehículos de obras públicas, que incluye: una pantalla táctil que comprende un visualizador y un sensor táctil, una unidad controladora del visualizador, una unidad de control de visualización y una unidad de generación de órdenes de control; en la que la pantalla táctil muestra una marca de detección del accionamiento, detecta un toque exterior y genera una señal de detección táctil que refleja una posición de un punto de toque sobre la pantalla táctil; la unidad controladora del visualizador, en respuesta a una orden de control de visualización desde la unidad de control de visualización, proporciona unas instrucciones de visualización a la pantalla táctil para controlar el contenido visualizado en la pantalla táctil, incluyendo el contenido de visualización una forma de la marca de detección del accionamiento y una posición de la marca de detección del accionamiento sobre la pantalla táctil; la unidad de control de visualización recibe la señal de detección... [Seguir leyendo]
Reivindicaciones:
1. Un controlador de pluma de vehículo de obras públicas, que comprende: una pantalla táctil que comprende un visualizador y un sensor táctil, una unidad controladora del visualizador, una unidad de control de visualización y una unidad de generación de órdenes de control; en el que la pantalla táctil muestra una marca de detección del accionamiento, detecta un toque exterior y genera una señal de detección táctil que refleja una posición de un punto de toque sobre la pantalla táctil; la unidad controladora del visualizador, en respuesta a una orden de control de visualización desde la unidad de control de visualización, proporciona unas instrucciones de visualización a la pantalla táctil para controlar un contenido visualizado en la pantalla táctil, incluyendo el contenido de visualización una forma de la marca de detección del accionamiento y una posición de la marca de detección del accionamiento sobre la pantalla táctil; la unidad de control de visualización recibe la señal de detección táctil desde la pantalla táctil, obtiene la posición del punto de toque sobre la pantalla táctil, determina si hay un solape entre la posición del punto de toque y una posición actual de la marca de detección del accionamiento, y fija la marca de detección del accionamiento en un estado activado si hay un solape entre la posición del punto de toque y la posición actual de la marca de detección del accionamiento; cuando la marca de detección del accionamiento está en un estado activado, repone la marca de detección del accionamiento a un estado de reposo si la señal de detección del toque desaparece; cuando la marca de detección del accionamiento está en un estado activado, proporciona la orden de control de visualización a la unidad controladora del visualizador, instruyendo la orden de control de visualización a la marca de detección del accionamiento para visualizarse en la posición del punto de toque indicado por la señal de detección táctil; y la unidad de generación de la orden de control recibe la señal de detección táctil desde la pantalla táctil y una señal de estado de la marca de detección del accionamiento desde la unidad de control de visualización, genera una orden de control que refleja una velocidad y una dirección de movimiento deseados del extremo de la pluma basándose en la posición del punto de toque sobre la pantalla táctil representado por la señal de detección táctil y una relación correspondiente predeterminada si la marca de detección del accionamiento está en un estado activado, y envía la orden de control a través de cable o por vía inalámbrica.
2. El controlador de pluma de vehículo de obras públicas de acuerdo con la reivindicación 1, en el que la marca de detección del accionamiento en un estado de reposo se visualiza en un centro geométrico de la pantalla táctil.
3. El controlador de pluma de vehículo de obras públicas de acuerdo con la reivindicación 1, en el que la marca de detección del accionamiento es un punto con una cierta área.
4. El controlador de pluma de vehículo de obras públicas de acuerdo con cualquiera de las reivindicaciones 1 a 3, en el que la relación correspondiente entre la posición del punto de toque en la pantalla táctil y la dirección de movimiento del extremo de la pluma se establece de la siguiente manera: se establece un sistema de coordenadas rectangular de la pantalla táctil sobre un plano de toque de la pantalla táctil, en el que se fija una posición de visualización de la marca de detección del accionamiento en un estado de reposo como un origen y se fijan direcciones predeterminadas perpendiculares entre sí como un eje X y un eje Y; se establece el sistema de coordenadas rectangular del movimiento real sobre un plano de movimiento del extremo de la pluma, en el que una posición inicial del movimiento del extremo de la pluma se fija como un origen y se fijan dos direcciones del plano de movimiento perpendiculares entre sí como un eje X y un eje Y; la dirección de movimiento deseada del extremo de la pluma se determina mediante la correspondencia de la dirección de la línea que conecta el origen del sistema de coordenadas rectangular de la pantalla táctil con la posición del punto de toque en la pantalla táctil, con una dirección que forma el mismo ángulo con el eje X y el eje Y en el sistema de coordenadas rectangulares del movimiento real.
5. El controlador de pluma de vehículo de obras públicas de acuerdo con la reivindicación 4, en el que la pantalla táctil es cuadrada o rectangular; en el sistema de coordenadas rectangular de la pantalla táctil, el eje X es paralelo a los bordes superior e inferior de la pantalla táctil y tiene una dirección positiva de apuntado hacia la derecha de la pantalla táctil, el eje Y es paralelo a los bordes derecho e izquierdo de la pantalla táctil y tiene una dirección positiva de apuntado hacia el lado superior de la pantalla táctil.
6. El controlador de pluma de vehículo de obras públicas de acuerdo con la reivindicación 4, en el que la velocidad de movimiento deseada del extremo de la pluma se determina por una distancia entre la posición del punto de toque sobre la pantalla táctil y el origen del sistema de coordenadas rectangular de la pantalla táctil, y cuanto mayor sea la distancia, mayor será la velocidad.
7. El controlador de pluma de vehículo de obras públicas de acuerdo con cualquiera de las reivindicaciones 1 a 3, en el que la relación de correspondencia entre la posición del punto de toque sobre la pantalla táctil y la dirección de movimiento del extremo de la pluma se establece de la siguiente manera: se establece un sistema de coordenadas polar de la pantalla táctil, en el que la posición de visualización de la marca de detección del accionamiento en un estado de reposo se fija como un polo y se fija una dirección predeterminada como un eje polar; se establece un sistema de coordenadas polar del movimiento real sobre el plano de movimiento del extremo de la pluma, en el que la posición inicial de movimiento del extremo de la pluma se fija como un polo y una dirección de movimiento predeterminada sobre el plano de movimiento se fija como un eje polar; la dirección de movimiento deseada del extremo de la pluma se obtiene de la siguiente manera: se obtiene un valor del ángulo polar del punto de toque en el
sistema de coordenadas polares de la pantalla táctil, y se obtiene el mismo valor de ángulo polar en el sistema de coordenadas polares del movimiento real como el del sistema de coordenadas polares de la pantalla táctil, en el que la dirección de movimiento representada por el valor del ángulo polar es la dirección de movimiento deseada del extremo de la pluma.
8. El controlador de pluma de vehículo de obras públicas de acuerdo con la reivindicación 7, en el que la pantalla táctil es cuadrada o rectangular; en el sistema de coordenadas polar de la pantalla táctil, el eje polar es paralelo a los bordes superior e inferior de la pantalla táctil y tiene una dirección positiva de apuntado hacia la derecha de la pantalla táctil.
9. El controlador de pluma de vehículo de obras públicas de acuerdo con la reivindicación 7, en el que la velocidad de movimiento deseada del extremo de la pluma se determina mediante un valor del radio polar del punto de toque en el sistema de coordenadas polares de la pantalla táctil, y cuanto mayor sea el valor del radio polar, mayor será la velocidad.
10. Un sistema de control de pluma de vehículo de obras públicas, que comprende el controlador de pluma de vehículo de obras públicas de acuerdo con cualquiera de las reivindicaciones 1 a 9.
11. Un vehículo de obras públicas que comprende el sistema de control de pluma de vehículo de obras públicas de acuerdo con la reivindicación 10.
12. El vehículo de obras públicas de acuerdo con la reivindicación 11, en el que el vehículo de obras públicas es un camión de bombeo de hormigón o una grúa.
13. Un procedimiento de control de pluma de vehículo de obras públicas, que comprende:
la visualización de una marca de detección del accionamiento sobre una pantalla táctil, la detección de un toque exterior y la generación de una señal de detección táctil que indica una posición de un punto de toque sobre la pantalla táctil; la recepción de la señal de detección táctil desde la pantalla táctil, obtención de la posición del punto de toque sobre la pantalla táctil, determinación de si hay un solape entre la posición del punto de toque y la posición actual de la marca de detección del accionamiento, fijación de la marca de detección del accionamiento en un estado activado si hay un solape entre la posición del punto de toque y la posición actual de la marca de detección del accionamiento, y envío de una orden de control de visualización correspondiente que instruye a la marca de detección del accionamiento para que se visualice en la posición del punto de toque indicado por la señal de detección táctil, en respuesta a la orden de control de visualización, proporcionar unas instrucciones de visualización a la pantalla táctil para controlar un contenido de visualización de la pantalla táctil, comprendiendo el contenido de visualización una forma de la marca de detección del accionamiento y la posición de la marca de detección del accionamiento sobre la pantalla táctil; y cuando se recibe la señal de detección táctil desde la pantalla táctil y una señal del estado de la marca de detección del accionamiento, generar una orden de control que refleje una velocidad y dirección de movimiento deseados del extremo de la pluma basándose en la posición del punto de toque sobre la pantalla táctil representado por la señal de detección táctil y una relación correspondiente predeterminada si la marca de detección del accionamiento está en un estado activado, y el envío de la orden de control a través de cable o por vía inalámbrica.
14. El procedimiento de acuerdo con la reivindicación 13, en el que cuando la marca de detección del accionamiento está en un estado activado, la marca de detección del accionamiento se repone a un estado de reposo si desaparece la señal de detección táctil.
15. El procedimiento de acuerdo con la reivindicación 14, en el que la marca de detección del accionamiento en un estado de reposo se visualiza en un centro geométrico de la pantalla táctil.
16. El procedimiento de acuerdo con cualquiera de las reivindicaciones 13 a 15, en el que la relación de correspondencia entre la posición del punto de toque sobre la pantalla táctil y la dirección de movimiento del extremo de la pluma se establece de la siguiente manera: se establece un sistema de coordenadas rectangular de la pantalla táctil sobre un plano de toque de la pantalla táctil, en el que se fija una posición de visualización de la marca de detección del accionamiento en un estado de reposo como un origen y se fijan direcciones predeterminadas como un eje X y un eje Y perpendiculares entre sí; se establece un sistema de coordenadas rectangular del movimiento real sobre un plano de movimiento del extremo de la pluma, en el que una posición inicial del movimiento del extremo de la pluma se fija como un origen y se fijan dos direcciones del plano de movimiento perpendiculares entre sí como un eje X y un eje Y; la dirección de movimiento deseada del extremo de la pluma se determina mediante la correspondencia de la dirección de la línea que conecta el origen del sistema de coordenadas rectangular de la pantalla táctil con la posición del punto de toque en la pantalla táctil, con una dirección que forma el mismo ángulo con el eje X y el eje Y en el sistema de coordenadas rectangulares del movimiento real.
17. El procedimiento de acuerdo con cualquiera de las reivindicaciones 13 a 15, en el que la relación de correspondencia entre la posición del punto de toque sobre la pantalla táctil y la dirección de movimiento del extremo de la pluma se establece en la siguiente manera:
se establece un sistema de coordenadas polar de la pantalla táctil, en el que la posición de visualización de la marca de detección del accionamiento en un estado de reposo se fija como un polo y se fija una dirección predeterminada como un eje polar; se establece un sistema de coordenadas polar del movimiento real sobre un plano de movimiento del extremo de la pluma, en el que la posición inicial de movimiento del extremo de la pluma se fija como un polo y una dirección de movimiento predeterminada sobre el plano de movimiento se fija como un eje polar; la dirección de movimiento deseada del extremo de la pluma se obtiene de la siguiente manera: obtención de un valor del ángulo polar del punto de toque en el sistema de coordenadas polares de la pantalla táctil, y obtención del mismo valor de ángulo polar en el sistema de coordenadas polares del movimiento real como en el sistema de coordenadas polares de la pantalla táctil, en el que la dirección de movimiento representada por el valor del ángulo polar es la dirección de movimiento deseada del extremo de la pluma.
Patentes similares o relacionadas:
CONTROLADOR MIDI CON SENSIBILIDAD PERSONALIZABLE, del 27 de Febrero de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: Un controlador MIDI comprendiendo un cuerpo principal con un superficie de digitación curvada, en donde dicha superficie de digitación curvada está formada […]
Aparatos y procedimientos de ampliación de servicios de aplicaciones, del 12 de Febrero de 2020, de QUALCOMM INCORPORATED: Un procedimiento para ampliar servicios de un dispositivo de usuario, que comprende: identificar una primera aplicación residente en el dispositivo […]
Sistema con integración de interfaz de usuario 3D, del 5 de Febrero de 2020, de 3SHAPE A/S: Un sistema que comprende: -por lo menos un visualizador , donde el por lo menos un visualizador está adaptado para representar visualmente una […]
Dispositivo electrónico de mano y método asociado que proporciona datos de tiempo en un entorno de mensajería, del 8 de Enero de 2020, de BlackBerry Limited: Un metodo para mostrar selectivamente sellos de tiempo para comunicaciones de mensajeria en un primer dispositivo electronico, el primer dispositivo […]
Aparato en entorno dental para controlar un dispositivo que pertenece al mismo, del 1 de Enero de 2020, de PLANMECA OY: Aparato de cuidado dental, dicho aparato incluye al menos dos dispositivos para trabajo de cuidado dental, y conectados a una red, es decir dos de los siguientes: […]
Método para proporcionar notificaciones de nuevos acontecimientos en un dispositivo de pantalla pequeña, del 25 de Diciembre de 2019, de BlackBerry Limited: Método de proporcionar notificaciones de mensajes no leídos en un dispositivo de comunicación inalámbrico, que comprende: visualizar al menos un primer icono […]
 Método para proporcionar notificaciones de nuevos eventos en un dispositivo de pantalla pequeña, del 25 de Diciembre de 2019, de BlackBerry Limited: Un método para proporcionar notificaciones de nuevos eventos de mensajes no leídos en un dispositivo de comunicación inalámbrico , estando configurado el dispositivo […]
Método para proporcionar notificaciones de nuevos eventos en un dispositivo de pantalla pequeña, del 25 de Diciembre de 2019, de BlackBerry Limited: Un método para proporcionar notificaciones de nuevos eventos de mensajes no leídos en un dispositivo de comunicación inalámbrico , estando configurado el dispositivo […]
Método implementado por ordenador, sistema y producto del programa de ordenador para simular el comportamiento de una mano que interactúa con objetos en un entorno virtual., del 19 de Septiembre de 2019, de UNIVERSIDAD REY JUAN CARLOS: Un método implementado por ordenador para simular el comportamiento de una mano que interactúa con objetos en un entorno virtual, que comprende adquirir […]