MÉTODO Y APARATO PARA DETERMINAR LA ROTACIÓN DE UN MOTOR EN UN SISTEMA DE VENTANA ELÉCTRICA O SIMILAR.
Un método, que comprende: recibir una entrada de control (410) para controlar una posición de una ventana (116);
aplicar una tensión eléctrica (412) a un motor (114) acoplado a la ventana en respuesta a la entrada de control de modo que se provoca la rotación de un rotor (320) del motor; medir la intensidad de corriente (414) que fluye en el motor como resultado de la tensión eléctrica; actualizar la tensión eléctrica aplicada al motor en respuesta a una entrada de control subsiguiente (416); caracterizado por: calcular una fuerza contraelectromotriz (420) asociada a la rotación del rotor en respuesta a dicho paso de actualizar; determinar si ha cambiado un signo de la fuerza contraelectromotriz; en el caso de que el signo de la fuerza contraelectromotriz haya cambiado (422), determinar un instante de tiempo en el que el signo de la fuerza contraelectromotriz ha cambiado (424); y determinar una posición del rotor (428) sobre la base del instante de tiempo en el que el signo de la fuerza contraelectromotriz ha cambiado
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E01304907.
Solicitante: Body Systems USA, LLC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 2135 WEST MAPLE ROAD TROY, MI 48084 ESTADOS UNIDOS DE AMERICA.
Inventor/es: Rogovin,Dan.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Junio de 2001.
Clasificación Internacional de Patentes:
G05B19/19FISICA. › G05CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
Clasificación PCT:
E05F15/00CONSTRUCCIONES FIJAS. › E05CERRADURAS; LLAVES; ACCESORIOS DE PUERTAS O VENTANAS; CAJAS FUERTES. › E05FDISPOSITIVOS PARA DESPLAZAR LOS BATIENTES DE LA POSICION ABIERTA A LA CERRADA O VICEVERSA; FRENOS PARA BATIENTES; APARELLAJE PARA BATIENTES NO PREVISTOS EN OTRA PARTE, RELATIVOS AL FUNCIONAMIENTO DEL BATIENTE. › Mecanismos para batientes movidos por una fuerza motriz (accesorios de cerraduras accionados por una fuerza motriz para completar el cierre o iniciar la apertura de un batiente E05B 17/00).
G05B19/19G05B 19/00 […] › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
Clasificación antigua:
G05B19/19G05B 19/00 […] › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
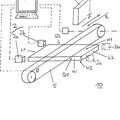
Metodo y aparato para determinar la rotacion de un motor en un sistema de ventana electrica o similar DESCRIPCION DE LA INVENCION La presente invención se refiere en general al campo de sistemas de automoción, y en particular a sistemas de ventana eléctrica. ANTECEDENTES DE LA INVENCION En un sistema de ventana eléctrica, cuando la corriente hacia el motor que provoca el movimiento de la ventana es invertida, la inercia provocará que el motor continúe moviéndose en la dirección original durante un breve periodo de tiempo sobre una cierta distancia, típicamente hasta una revolución del inducido con una duración de aproximadamente 10 milisegundos. La resolución precisa de la posición de la ventana mediante el sistema de control de la ventana eléctrica requiere el conocimiento de cuándo se produce realmente la inversión del motor, y no sólo el instante de tiempo en el que se aplicó la señal de dirección inversa al motor. Además, el conocimiento de la inercia de los amortiguadores de la ventana y otros aspectos mecánicos del sistema regulador de la ventana eléctrica son necesarios para obtener una solución de posición de ventana precisa. De este modo, sería altamente deseable ser capaces de determinar la posición del rotor del motor en un sistema de ventana eléctrica con un nivel de precisión más alto. Un sistema de ventana eléctrica conocido tal como se da a conocer en la solicitud de patente del Reino Unido GB 2221769, en el que la posición de una ventana eléctrica se determina vigilando la fuerza contraelectromotriz en el motor de accionamiento y determinando el número de revoluciones contando los impulsos de fuerza generados por la rotación del rotor respecto al estátor. RESUMEN DE LA INVENCION La presente invención está dirigida a un método, programa y aparato para determinar la rotación del motor en un sistema de ventana eléctrica o similar, de acuerdo con las reivindicaciones. Debe entenderse que tanto la descripción general precedente como la descripción detallada siguiente están sólo a modo de ejemplo y de forma explicativa y no restringen la invención, según se reivindica. Los dibujos adjuntos, que se incorporan en y constituyen una parte de la memoria descriptiva, ilustran una realización de la invención y junto con la descripción general, sirven para explicar los principios de la invención. BREVE DESCRIPCION DE LOS DIBUJOS Las numerosas ventajas de la presente invención serán mejor entendidas por aquellas personas con experiencia en la técnica mediante referencia a las figuras adjuntas, en las cuales: la figura 1 es un diagrama de bloques de un sistema de ventana eléctrica de acuerdo con la presente invención; la figura 2 es un diagrama de bloques de un sistema de control basado en ordenador capaz de ser utilizado en un sistema de ventana eléctrica de acuerdo con la presente invención; la figura 3 es un diagrama de bloques que muestra detalles adicionales de un sistema de ventana eléctrica tal como se muestra en la figura 1, de acuerdo con la presente invención; y la figura 4 es un diagrama de flujo de un método para determinar la rotación del motor en un sistema de ventana eléctrica de acuerdo con la presente invención. DESCRIPCION DETALLADA DE LA INVENCION Se hará ahora referencia en detalle a la realización actualmente preferida de la invención, un ejemplo de la cual se ilustra en los dibujos adjuntos. Con referencia ahora a la figura 1, se discutirá un diagrama de bloques de un sistema de ventana eléctrica de acuerdo con la presente invención. El sistema de ventana eléctrica 100 incluye un sistema de control 110 acoplado a una fuente de alimentación eléctrica 112. El sistema de control 110 controla la aplicación de corriente eléctrica al motor 114 de tal modo que se provoca el movimiento de la ventana eléctrica 116 (por ejemplo hacia arriba o hacia abajo) en respuesta a una señal de control proporcionada por el sistema de control 110. La fuente de alimentación eléctrica 112 incluye la batería del vehículo en el cual se utiliza el sistema eléctrico 100, y puede incluir además otros sistemas eléctricos, por ejemplo, un alternador y circuitería de regulación de energía eléctrica y de acondicionamiento. El sistema de control 110 puede recibir una entrada desde un operador del vehículo, por ejemplo a través del uso de un actuador o conmutador de control de ventana para provocar que la ventana eléctrica 116 sea levantada o bajada de acuerdo con el deseo del operador. El sistema de control 110 puede ser, por ejemplo, un ordenador, microcontrolador o sistema basado en lógica digital o similar que sea capaz de procesar electrónicamente una entrada y proporcionar una señal de control apropiada como una salida capaz de ser procesada por el sistema de ventana eléctrica 100 para implementar una fun 2 ES 2 367 522 T3 ción de control correspondiente a la entrada. Un ejemplo de un sistema de hardware de ordenador adecuado para ser implementado como sistema de control 110 se discute con referencia a la figura 2. Con referencia ahora a la figura 2, se muestra un sistema de hardware de acuerdo con la presente invención. El sistema de hardware mostrado en la figura 2 es representativo en general de la arquitectura de hardware de una realización de sistema de ordenador de la presente invención. El sistema de ordenador 200 puede estar configurado para implementar uno o más subsistemas del sistema de ventana eléctrica 100 de la figura 1, por ejemplo, como una realización de un sistema de control 110. Un procesador central 202 controla el sistema de ordenador 200. El procesador central 202 incluye una unidad de procesamiento central tal como un microprocesador o microcontrolador para ejecutar programas, realizar manipulaciones de datos y controlar las tareas del sistema de ordenador 200. La comunicación con el procesador central 202 se implementa a través de un bus de sistema 210 para transferir información entre los componentes del sistema de ordenador 200. El bus 210 puede incluir un canal de datos para facilitar la transferencia de información entre el sistema de almacenamiento y otros componentes periféricos del sistema de ordenador 200. El bus 210 proporciona además el conjunto de señales requeridas para la comunicación con el procesador central 202, incluyendo un bus de datos, un bus de direcciones y un bus de control. El bus 210 puede comprender cualquier arquitectura de bus según el estado de la técnica y de acuerdo con estándares promulgados, por ejemplo la arquitectura estándar de la industria (ISA, del inglés Industry Standard Architecture), la arquitectura estándar extendida de la industria (EISA, del inglés Extended ISA), la arquitectura de microcanal (MCA, del inglés Micro Channel Architecture), el bus local de interconexión de componentes periféricos (PCI, del inglés Peripheral Component Interconnect), estándares promulgados por el Instituto de Ingenieros Eléctricos y Electrónicos (IEEE, del inglés Institute of Electrical and Electronics Engineers) que incluyen el bus de interfaz de propósito general (GPIB, del inglés General-Purpose Interface Bus) de estándar IEEE 488, el estándar IEEE 696/S-100, etc. Además, el bus 210 puede cumplir con cualquier estándar promulgado de la industria. Por ejemplo, el bus 210 puede ser diseñado cumpliendo con cualquiera de las siguientes arquitecturas de bus: arquitectura estándar de la industria (ISA), arquitectura estándar extendida de la industria (EISA), arquitectura de microcanal, interconexión de componentes periféricos (PCI), bus serie universal (USB, del inglés Universal Serial Bus), bus de tipo Access.bus, IEEE P1394, bus de sobremesa Apple (ADB, del inglés Apple Desktop Bus), interfaz de autopista de concentración (CHI, del inglés Concentration Highway Interface), Fire Wire, Geo Port, o interfaz para sistemas de computación pequeños (SCSI, del inglés Small Computer Systems Interface), por ejemplo. Otros componentes del sistema de ordenador 200 incluyen la memoria principal 204, la memoria auxiliar 206, y un procesador auxiliar 208 según sea necesario. La memoria principal 204 proporciona almacenamiento de instrucciones y datos para programas que se ejecutan en el procesador central 202. La memoria principal 204 es típicamente una memoria basada en semiconductores tal como una memoria dinámica de acceso aleatorio (DRAM, del inglés Dynamic Random Access Memory) o una memoria estática de acceso aleatorio (SRAM, del inglés Static RAM). La memoria auxiliar 206 proporciona almacenamiento de instrucciones y datos que son cargados a la memoria principal 204 antes de la ejecución. La memoria auxiliar 206 puede incluir una memoria basada en semiconductores tal como una memoria de sólo lectura (ROM, del inglés Read-Only Memory), una memoria programable de sólo lectura (PROM, del inglés Programmable ROM), una memoria de sólo lectura programable... [Seguir leyendo]
Reivindicaciones:
recibir una entrada de control (410) para controlar una posición de una ventana (116); aplicar una tensión eléctrica (412) a un motor (114) acoplado a la ventana en respuesta a la entrada de control de modo que se provoca la rotación de un rotor (320) del motor; medir la intensidad de corriente (414) que fluye en el motor como resultado de la tensión eléctrica; actualizar la tensión eléctrica aplicada al motor en respuesta a una entrada de control subsiguiente (416); caracterizado por: calcular una fuerza contraelectromotriz (420) asociada a la rotación del rotor en respuesta a dicho paso de actualizar; determinar si ha cambiado un signo de la fuerza contraelectromotriz; en el caso de que el signo de la fuerza contraelectromotriz haya cambiado (422), determinar un instante de tiempo en el que el signo de la fuerza contraelectromotriz ha cambiado (424); y determinar una posición del rotor (428) sobre la base del instante de tiempo en el que el signo de la fuerza contraelectromotriz ha cambiado. 2. Un programa de instrucciones almacenable en un medio legible por ordenador para hacer que un ordenador implemente los pasos de determinar la posición de una ventana (116), en que los pasos comprenden: recibir una entrada de control (410) para controlar una posición de la ventana; aplicar una tensión eléctrica (412) a un motor (114) acoplado a la ventana en respuesta a la entrada de control de modo que se provoca la rotación de un rotor (320) del motor; medir la intensidad de corriente (414) que fluye en el motor como resultado de la tensión eléctrica; actualizar la tensión eléctrica aplicada al motor en respuesta a una entrada de control subsiguiente (416); caracterizado por: calcular una fuerza contraelectromotriz (420) asociada a la rotación del rotor en respuesta a dicho paso de actualizar; determinar si ha cambiado un signo de la fuerza contraelectromotriz; en el caso de que el signo de la fuerza contraelectromotriz haya cambiado, (422) determinar un instante de tiempo en el que el signo de la fuerza contraelectromotriz ha cambiado (424); y determinar una posición del rotor (428) sobre la base del instante de tiempo en el que el signo de la fuerza contraelectromotriz ha cambiado. 3. Un método o programa de instrucciones según cualquier reivindicación precedente, en que dicho paso de calcular se aplica a una ecuación de motor resuelta para la fuerza contraelectromotriz. 4. Un método o programa de instrucciones según cualquier reivindicación precedente, en que dicho paso de medir incluye los pasos de muestrear periódicamente la intensidad de corriente a intervalos de tiempo predeterminados y dividir dos muestras de intensidad de corriente consecutivas por uno de los intervalos de tiempo predeterminados. 5. Un método de programa de instrucciones según cualquier reivindicación precedente, en que dicho paso de calcular está basado en la ecuación: dIt VCEMF =V0 RI t L donde: dt V CEMF = fuerza contraelectromotriz V 0 = tensión eléctrica de alimentación R = resistencia del motor I(t) = intensidad de corriente L = inductancia del motor ES 2 367 522 T3 6 6. Un medio legible por ordenador que lleva un programa de instrucciones de acuerdo con una cualquiera de las reivindicaciones 2 a 5. 7. Un aparato, que comprende: medios, (114) acoplables a una ventana (116), para mover la ventana dispuesta en un vehículo y que son capaces de ser dispuestos en al menos dos posiciones desde una primera de las al menos dos posiciones hasta una segunda de las al menos dos posiciones; y medios (110) para controlar dichos medios de movimiento, en que dichos medios de control son capaces de determinar la posición (428) de dichos medios de movimiento caracterizado porque los medios de control determinan la posición con un cálculo de una fuerza contraelectromotriz en el caso de que una fuerza contraelectromotriz sea impartida en dichos medios de movimiento, y porque los medios de control son capaces de determinar la posición de dichos medios de movimiento sobre la base del instante de tiempo en el que ha cambiado el signo de la fuerza contraelectromotriz. 8. Un vehículo, que comprende: el aparato según la reivindicación 7, y; ES 2 367 522 T3 un motor dispuesto en dicho vehículo, en que dicho motor es capaz de proporcionar propulsión a dicho vehículo y es capaz de proporcionar energía eléctrica a dichos medios de movimiento 9. Un aparato o un vehículo según la reivindicación 7 o la reivindicación 8, en que dichos medios de movimiento comprenden un motor (114) que tiene un rotor (320), en que dichos medios de control son capaces de determinar una posición del rotor con un cálculo de una fuerza contraelectromotriz en el caso de que una fuerza contraelectromotriz sea impartida en el motor. 10. Un aparato o un vehículo según una cualquiera de las reivindicaciones 7 a 9, en que dichos medios de control incluyen un procesador para implementar funciones de dichos medios de control a través de un programa de instrucciones interpretables por dicho procesador. 11. Un aparato o un vehículo según la reivindicación 7 a 10, que comprende además medios (112), controlados por dichos medios de control, para aplicar energía eléctrica a dichos medios de movimiento. 12. Un aparato o un vehículo según la reivindicación 11, en que dichos medios de aplicación de energía eléctrica incluyen una batería. 13. Un aparato o un vehículo según una cualquiera de las reivindicaciones 7 a 12, en que dichos medios de control incluyen un microcontrolador para implementar funciones de dichos medios de control a través de un código de microcontrolador interpretable por dicho microcontrolador. 7 ES 2 367 522 T3 8 ES 2 367 522 T3 9 ES 2 367 522 T3
Patentes similares o relacionadas:
Dispositivo de control para máquina herramienta y máquina herramienta provista de dicho dispositivo de control, del 27 de Mayo de 2020, de CITIZEN WATCH CO. LTD.: Un dispositivo de control (C) para una máquina herramienta provisto en una máquina herramienta que tiene una herramienta de corte para cortar una pieza […]
Equipo de control con optimizador integrado, del 11 de Marzo de 2020, de SIEMENS AKTIENGESELLSCHAFT: Equipo de control para una maquina con al menos un eje , en donde el equipo de control esta programado con un programa de sistema, en donde el equipo de control […]
Procedimiento para controlar un movimiento, equipo de control y accionamiento lineal, del 4 de Marzo de 2020, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para controlar un movimiento de varios rotores (L) de un accionamiento lineal (LA), presentando el accionamiento lineal (LA) varios segmentos […]
Máquina de mecanizado y procedimiento para mecanizar piezas de trabajo, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para mecanizar piezas (W) de trabajo esencialmente en forma de placa, que están compuestas preferiblemente, al menos por secciones, de madera, materiales […]
SISTEMA DE CONTROL ROBUSTO POR MODOS DESLIZANTES DE UN MOTOR AC, del 11 de Julio de 2019, de INSTITUTO TECNOLÓGICO METROPOLITANO: La presente invención se relaciona con un sistema de control robusto por modos deslizantes de un motor AC en el que se utiliza un variador de frecuencia como elemento […]
Procedimiento para controlar y/o regular un accionamiento lineal, equipo de control, accionamiento lineal e instalación, del 19 de Junio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para controlar y/o regular un accionamiento lineal (LA), que presenta al menos un segmento (Seg), varios rotores (L), al menos un puesto de máquina (MS1, MS2) […]
Procedimiento de aplicación de un producto de revestimiento sobre una pieza desplazada por un transportador e instalación de aplicación de un producto de revestimiento, del 17 de Mayo de 2019, de EXEL INDUSTRIES: Procedimiento de aplicación de un producto de revestimiento sobre una pieza desplazada por un transportador , a lo largo del cual está […]
Procedimiento para la determinación de valores de corrección de la distancia en el procesamiento por láser de una pieza de trabajo y máquina de procesamiento por láser pertinente, del 20 de Marzo de 2019, de TRUMPF LASER- UND SYSTEMTECHNIK GMBH: Procedimiento para la determinación de valores de corrección de la distancia (ΔA) de una distancia teórica entre una boquilla de procesamiento por […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Máquina de mecanizado y procedimiento para mecanizar piezas de trabajo, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para mecanizar piezas (W) de trabajo esencialmente en forma de placa, que están compuestas preferiblemente, al menos por secciones, de madera, materiales […]
Máquina de mecanizado y procedimiento para mecanizar piezas de trabajo, del 25 de Septiembre de 2019, de HOMAG GmbH: Máquina de mecanizado para mecanizar piezas (W) de trabajo esencialmente en forma de placa, que están compuestas preferiblemente, al menos por secciones, de madera, materiales […]