METODO PARA LA REDUCCION DE LA VIBRACION RESIDUAL GENERADA POR UNA SEÑAL DE EXCITACION O CONTROL TRANSITORIA MEDIANTE EL AJUSTE DEL CONTENIDO FRECUENCIAL DE DICHA SEÑAL.
Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria mediante el ajuste del contenido frecuencial de dicha señal.
La presente invención tiene por objetivo la reducción de vibraciones residuales provocadas por la excitación de una señal transitoria en sistemas genéricos vibratorios con comportamiento lineal. Esta señal puede corresponder, por ejemplo, a una ley de movimiento de una inercia, o a una entrada de fuerza excitadora del mismo.El método descrito consiste en la utilización de señales de excitación cuyo contenido frecuencial sea nulo en las frecuencias fi, y el ajuste de esta señal para que dichas frecuencias coincidan con las frecuencias propias del sistema vibratorio. Se consigue así anular esta vibración en sistemas con amortiguamientos modales nulos, y en sistemas con bajo amortiguamiento, aunque no se anula, también es notable la reducción.Se incluye una particularización del método, consistente en la obtención de la señal de excitación deseada mediante la convolución temporal de pulsos, aunque es extensible a la convolución temporal de cualquier señal con contenidos frecuenciales nulos en las frecuencias deseadas
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200700044.
Solicitante: UNIVERSITAT POLITECNICA DE CATALUNYA.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: VECIANA FONTANET,JOAQUIM MARIA, CARDONA FOIX,SALVADOR.
Fecha de Solicitud: 29 de Diciembre de 2006.
Fecha de Publicación: .
Fecha de Concesión: 12 de Abril de 2011.
Clasificación Internacional de Patentes:
- G05B19/19 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
- G05B19/416 G05B 19/00 […] › caracterizado por el control de la velocidad, de la aceleración o de la deceleración (G05B 19/19 tiene prioridad).
- G05B5/01 G05B […] › G05B 5/00 Disposiciones para eliminar la inestabilidad. › eléctricas.
Clasificación PCT:
- G05B19/19 G05B 19/00 […] › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
- G05B19/416 G05B 19/00 […] › caracterizado por el control de la velocidad, de la aceleración o de la deceleración (G05B 19/19 tiene prioridad).
- G05B5/01 G05B 5/00 […] › eléctricas.
Fragmento de la descripción:
Método para la reducción de la vibración residual generada por una señal de excitación o control transitoria mediante el ajuste del contenido frecuencial de dicha señal.
Sector de la técnica
La invención se encuadra en el sector técnico de vibraciones mecánicas en elementos de máquinas, más concretamente en el estudio de la reducción de vibraciones residuales en sistemas genéricos vibratorios con comportamiento lineal, después de ser sometidos a algún tipo de señal transitoria, por ejemplo, en transitorios de movimiento de una inercia sobre ellos o en fuerzas excitadoras.
Estado de la técnica
El estudio de la reducción de oscilaciones residuales después de la entrada de una señal transitoria tiene su origen en movimientos punto a punto de inercias, como por ejemplo en grúas, pórticos o aplicaciones sobre manipuladores robóticos con más o menos flexibilidad en sus elementos, y tiene como objetivo la mejora en la precisión de los movimientos sin precisar tiempos de demora elevados y/o el aumento de sus prestaciones para la reducción de costes de explotación en su funcionamiento.
Existen dos áreas de estudio en cuanto a la reducción de vibraciones residuales. La primera está basada en la síntesis de señales que definen el transitorio. La segunda está basada en sistemas de control activo de vibraciones.
Dentro del primer grupo, las técnicas más estudiadas para la síntesis de estas señales que definen los transitorios, ya sean de movimiento o fuerza, corresponden a:
1. Perfilado de señales de control mediante convolución de un tren de impulsos o pulsos con una señal de referencia conocida. La oscilación generada en el sistema por un impulso es cancelada por superposición de la oscilación generada por un segundo impulso (patente US-4916635 y 13114491).
2. Reducción de la respuesta del sistema mediante filtrado digital de la señal de control en la banda de frecuencias de interés (Oppenheim, A.V. y Schafer, R.W. (1975) Digital Signal Processing. USA: Prentice-Hall, Inc y Singhose, W.E., Singer, N.C., Seering, W.P. (1995), Comparison of Command Shaping Methods for Reducing Residual Vibration. Proceedings of the 1995 European Control Conference).
3. Definición de señales por inversión de la dinámica del sistema. Consiste en la generación de la señal de control partiendo de las ecuaciones dinámicas del sistema invertidas, y de la respuesta de salida deseada (Asada, Haruhiko, Ma, Zeng-Dong, y Tokumaru, Hidekatsu, (1987), Inverse Dynamics of Flexible Robot Arms of Trajectory Control. Moldeling and Control of Robotic Manipulators, ASME 1987 Winter Annual Meeting).
Si bien la técnica del punto 2 utiliza herramientas del dominio frecuencial para minimizar vibraciones residuales, no explica, en base al contenido frecuencial de la señal de entrada, en que casos esta utilización puede ser efectiva o no.
La presente invención expone el desarrollo teórico y las conclusiones a partir de las cuales se podrá generar una determinada señal de excitación o control con el objetivo de reducir las vibraciones residuales, en sistemas dinámicos lineales, con amortiguamientos reducidos nulos o cercanos a cero.
Descripción de las figuras
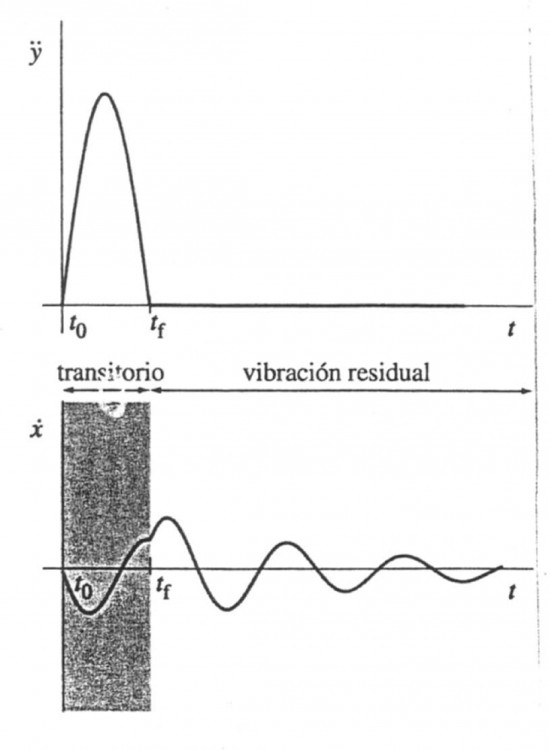
Figura 1: Significado de vibración residual.
Figura 2: Sistema genérico de un grado de libertad vibratorio.
Figura 3: Señal de excitación con contenido frecuencial nulo en f0.
Figura 4: Pulso temporal de duración 1/f0 y su contenido frecuencial.
Figura 5: Trapecio con contenido frecuencial nulo en f0, resultante de la convolución de dos pulsos temporales.
Figura 6: Señal de excitación y(t) con integral temporal nula, y con contenido frecuencial nulo en f0.
Figura 7: Disminución del contenido frecuencial alrededor de f0 utilizando una señal triangular, resultado de la convolución de dos pulsos temporales de la misma duración.
Figura 8: Señal obtenida por convolución de una señal triangular y de un pulso de duración t2>2/f0.
Figura 9: Escalado según el eje temporal de la señal y(t) cuando t2>2/f0.
Figura 10: Generación de una señal y1(t) por convolución de dos pulsos que anulan el contenido frecuencial en f0
Figura 11: Señal temporal y1(t) obtenida mediante la convolución temporal de tres pulsos y su espectro frecuencial.
Figura 12: Convolución temporal de un pulso con un trapezoide y contenido frecuencial de la señal resultante.
Figura 13: Ejemplo de vibración residual no nula para una señal de entrada tipo pulso con contenido frecuencial nulo en f0, en un sistema como el de la figura 2, con razón de amortiguamiento ζ=0,3.
Figura 14: Ejemplo de vibración residual nula para una señal de entrada tipo pulso con contenido frecuencial nulo en f0, en un sistema como el de la figura 2, con razón de amortiguamiento ζ=0.
Figura 15: Ejemplo de vibración residual para una señal de entrada tipo seno definido de 0 a π, con contenido frecuencial nulo en f0, en un sistema como el de la figura 2, con razón de amortiguamiento: a) ζ=0,3 y b) ζ=0.
Figura 16: Ejemplo de sistema de dos grados de libertad vibratorios.
Figura 17: Señal de entrada
Figura 18: Señal de entrada
Descripción detallada de la invención
Se define vibración residual de la respuesta de un sistema mecánico vibratorio, aquella respuesta que se observa a partir del instante de tiempo en que acaba la señal excitadora, supuesta ésta transitoria (figura 1).
Haciendo referencia al sistema genérico de la figura 2, se han tomado como señales de entrada y salida representativas
La respuesta
En la expresión (1.2) no se puede evaluar de manera directa cual es el comportamiento del sistema a partir de un cierto instante de tiempo. En particular, si la señal de entrada es transitoria, y su contenido frecuencial se anula para una frecuencia f0
Sin embargo, existe un caso particular en el cual la condición de contenido frecuencial nulo de una señal de entrada transitoria sí implica que la respuesta residual...
Reivindicaciones:
1. Método para generar señales transitorias de excitación en sistemas lineales dinámicos de al menos un grado de libertad vibratorio para reducir vibraciones residuales que comprende: la determinación de las frecuencias propias fi del sistema vibratorio, cuya influencia se desee reducir en la vibración residual, mediante ensayo o mediante la resolución de las ecuaciones diferenciales que corresponden a sus ecuaciones de movimiento; la generación de la señal transitoria de excitación caracterizada por: la selección de una señal transitoria de amplitud arbitraria, con contenido frecuencial nulo en al menos una frecuencia de su espectro; la modificación de la duración temporal de dicha señal para que dicho punto de contenido frecuencial nulo coincida con una de las frecuencias propias del sistema; la realización del proceso anterior, de selección y ajuste temporal, para todas y cada una de las restantes frecuencias propias del sistema; la convolución temporal de las señales transitorias obtenidas para cada una de las frecuencias propias del sistema.
2. Método según la reivindicación 1 caracterizado porque las razones de amortiguamiento modal del sistema toman valores de hasta 0,1 en los modos propios que se hayan considerado relevantes en la vibración residual.
3. Método según la reivindicación 1 caracterizado por la obtención de una segunda señal transitoria de excitación mediante la o las derivaciones o integraciones temporales de la señal transitoria de excitación.
4. Método según las reivindicaciones 1, 2 ó 3 caracterizado por el escalado de la amplitud de la señal transitoria de excitación para satisfacer una condición de contorno (requerimiento funcional).
5. Método según las reivindicaciones 1, 2, 3 ó 4 caracterizado porque el sistema lineal vibratorio es un sistema mecánico.
6. Método según las reivindicaciones 1, 2, 3 ó 4 caracterizado porque el sistema lineal vibratorio es un sistema eléctrico.
7. Método según las reivindicaciones 1, 2, 3 ó 4 caracterizado porque el sistema lineal vibratorio es un sistema químico.
8. Método según la reivindicación 4 caracterizado porque se realiza la convolución temporal de la señal transitoria de excitación con una señal transitoria auxiliar, para satisfacer una segunda condición de contorno (requerimiento funcional) correspondiente a la duración total de la señal transitoria de excitación.
9. Método según la reivindicación 1, 2, 3 ó 4 caracterizado porque las señales transitorias utilizadas con contenido frecuencial nulo en las frecuencias fi son pulsos de duración ajustada a 1/fi segundos.
10. Método según la reivindicación 8 caracterizado porque la señal transitoria auxiliar, usada para satisfacer una segunda condición de contorno, es un pulso.
11. Método según la reivindicación 8 para generar señales transitorias de excitación con integral nula, caracterizado porque la señal transitoria auxiliar, usada para satisfacer una segunda condición de contorno, está constituida por dos pulsos iguales concatenados dispuestos con simetría puntual.
12. Método según las reivindicaciones 9, 9 y 10, ó 9 y 11 para dar mayor robustez a la reducción de vibraciones, caracterizado por realizar, para cada una de las frecuencias en donde se desea dar dicha mayor robustez, la convolución temporal de la señal transitoria de excitación con al menos un pulso adicional de duración múltiplo a la del pulso que anula el contenido frecuencial a la correspondiente frecuencia.
13. Método según la reivindicación 12 para dar mayor robustez a la reducción de vibraciones, caracterizado por la substitución de los pulsos que corresponden a una misma frecuencia fi, por la convolución temporal de dos pulsos de duración 1/(fi + Δf) y 1/(fi - Δf).
14. Método según las reivindicaciones 9, 9 y 10, ó 9 y 11 para reducir la duración de la señal transitoria de excitación, caracterizado por la substitución, por un pulso de duración 1/fmed, de los pulsos que corresponden a las frecuencias cuyo máximo común denominador es fmed.
15. Método según las reivindicaciones 9 y 10 para el ajuste de una segunda condición de contorno, cuando se cumple que la duración de la señal transitoria de excitación que se desea es superior a dos veces la suma de las duraciones 1/fi de los pulsos obtenidos para cada una de las frecuencias propias fi, caracterizado por: la identificación de un punto de ordenada máxima de la señal transitoria de excitación; la partición de la señal transitoria de excitación en dos partes, anterior y posterior, por dicho punto; el alargado de la señal transitoria de excitación por desplazamiento temporal de la parte posterior, hasta la duración total deseada.
16. Método según las reivindicaciones 9, 9 y 10, 9 y 11, 12, 13, 14 ó 15 caracterizado porque las razones de amortiguamiento modal del sistema toman valores de hasta 0,3 en los modos propios que tienen relevancia en la vibración residual, cuando la señal transitoria de excitación sea el resultado de la convolución temporal de, al menos, dos pulsos.
17. Método según las reivindicaciones 9, 9 y 10, 9 y 11, 12, 13, 14, 15 ó 16 caracterizado por la generación de la señal transitoria de excitación descrita mediante la concatenación de curvas de Bézier, no paramétricas y no racionales.
18. Método según las reivindicaciones 9, 9 y 10, 9 y 11, 12, 13, 14, 15 ó 16 caracterizado por la generación de la señal transitoria de excitación descrita mediante una curva B-spline, no paramétrica y no racional.
Patentes similares o relacionadas:
Dispositivo de diagnóstico de fallos y método de diagnóstico de fallos, del 9 de Octubre de 2019, de NISSAN MOTOR CO., LTD.: Un dispositivo de diagnóstico de fallos aplicable a un dispositivo mecánico provisto de un motor como fuente para accionar un eje de […]
Procedimiento de ajuste del consumo de energía de dos herramientas durante el mecanizado de extremos de secciones de tubo, del 16 de Enero de 2019, de Rattunde AG: Procedimiento de mecanizado de una sección de perfil largo que tiene una longitud real (L1) y un primer y un segundo extremo (3, 3'), donde […]
Procedimiento y dispositivo para soldadura por láser remoto asistida por robot con un control simplificado de la dirección de focalización del haz de rayo láser, del 11 de Abril de 2018, de COMAU S.P.A.: Procedimiento de soldadura por láser de una estructura constituida por unos elementos de planchas de metal, en el cual: - un robot de manipulación […]
Método de mando y control del motor eléctrico de una unidad de automatización y sistema conectado, del 26 de Julio de 2017, de GIMA TT S.r.l: Método para optimizar el mando y control de un motor eléctrico de una unidad de automatización , que comprende un elemento mecánico […]
Perforación con sensor de empuje adaptativo, del 12 de Julio de 2017, de THE BOEING COMPANY: Un aparato para realizar una operación de perforación sobre un apilamiento de materiales, comprendiendo el aparato: un alojamiento ; […]
Método para mover una herramienta de una máquina de CNC sobre una superficie, del 31 de Mayo de 2017, de FIDIA S.P.A.: Método para mover una herramienta de una máquina de CNC sobre una superficie en el que la máquina de CNC está dotada de una unidad de sensor , que […]
 Procedimiento de control de un robot de taladrado y robot de taladrado que utiliza el procedimiento, del 28 de Diciembre de 2016, de Safran Nacelles: Procedimiento de control de un robot de taladrado, del tipo que comprende una estructura mecánica pilotada que permite colocar una herramienta de taladrado en una secuencia […]
Procedimiento de control de un robot de taladrado y robot de taladrado que utiliza el procedimiento, del 28 de Diciembre de 2016, de Safran Nacelles: Procedimiento de control de un robot de taladrado, del tipo que comprende una estructura mecánica pilotada que permite colocar una herramienta de taladrado en una secuencia […]
Estructura de regulador para varias unidades de accionamiento acopladas mecánicamente, del 26 de Febrero de 2014, de DR. JOHANNES HEIDENHAIN GMBH: Estructura de regulador para más de dos unidades de accionamiento acopladas mecánicamente a unelemento móvil , en donde la estructura de regulador presenta […]