Aparato de control numérico.
Un dispositivo de control numérico (1) dispuesto para llevar a cabo una mecanización sobre una pieza de trabajo mientras se mueve una herramienta y la pieza de trabajo,
cada una con relación a la otra, a lo largo de una trayectoria de movimiento con vibraciones por medio de ejes de accionamiento con los que se ha dotado la herramienta o la pieza de trabajo, comprendiendo el dispositivo:
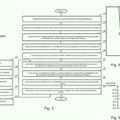
una unidad de análisis de relación de la amplitud de vibración respecto a alimentación (453), dispuesta para analizar si una relación entre una amplitud de las vibraciones y una velocidad de alimentación de la herramienta respecto a la pieza de trabajo está incluida en un programa de mecanización (432), y dispuesta para obtener la relación entre una amplitud de las vibraciones y una velocidad de alimentación de la herramienta respecto a la pieza de trabajo cuando está incluida en el programa de mecanización (432);
una unidad de cálculo de diferencia de fase (481) dispuesta para calcular, como diferencia de fase, un lapso de tiempo en una posición de movimiento vibratorio hacia atrás con relación a una posición de movimiento vibratorio hacia adelante generada en base a un bloque de comando en el programa de mecanización (432) a partir de la relación entre una amplitud de las vibraciones y una velocidad de alimentación de la herramienta respecto a la pieza de trabajo, estando la relación designada para el movimiento y haciendo que la relación sea constante; una unidad de generación de trayectoria de movimiento (482) dispuesta para generar la posición de movimiento vibratorio hacia adelante y la posición de movimiento vibratorio hacia atrás como trayectoria de movimiento para cada uno de los ejes de accionamiento en base a la diferencia de fase;
una unidad de generación de cantidad de movimiento vibratorio (484) dispuesta para calcular una cantidad de movimiento vibratorio sobre la trayectoria de movimiento para cada uno de los ejes de accionamiento en base a una forma de onda de vibración de referencia que se va a superponer sobre la trayectoria de movimiento, y una unidad de combinación de cantidad de movimiento (485) dispuesta para generar una cantidad de movimiento combinado para cada uno de los ejes de accionamiento añadiendo la cantidad de movimiento vibratorio a la trayectoria de movimiento,
en donde la relación entre una amplitud de las vibraciones y una velocidad de alimentación de la herramienta respecto hasta la pieza de trabajo, Q, está representada por:
Q ≥ A/F
en donde A es la amplitud sobre una trayectoria de movimiento con relación al tiempo y F es la velocidad de alimentación, la cantidad de alimentación por revolución,
en donde la unidad de cálculo de diferencia de fase (481) está dispuesta para calcular, como diferencia de fase, un lapso de tiempo en una posición de movimiento vibratorio hacia atrás con relación a una posición de movimiento vibratorio hacia adelante generada en base a un bloque de comando en el programa de mecanización (432) en base a la ecuación:
A/W ≥ F/T, que puede ser reordenada como:
W ≥ AT/F ≥ QT,
en donde W es la diferencia de fase calculada, A es la amplitud, F es la cantidad de alimentación por revolución, y T es el tiempo requerido por revolución de un eje principal,
en donde la diferencia de fase es una diferencia entre una posición de movimiento vibratorio hacia adelante y una posición de movimiento vibratorio hacia atrás.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/JP2014/061488.
Solicitante: MITSUBISHI ELECTRIC CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 7-3, Marunouchi 2-chome, Chiyoda-ku Tokyo 100-8310 JAPON.
Inventor/es: MATSUMOTO, HITOSHI, WATANABE,MITSUO, SAGASAKI,MASAKAZU, HIRATA,YUKI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q15/013 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 15/00 Control automático o regulación del movimiento de avance, de la velocidad de corte o de la posición tanto de la herramienta como de la pieza. › Control o regulación del movimiento de avance (B23Q 15/12 tiene prioridad).
- G05B19/19 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › caracterizado por sistemas de control de posición o de control de contorno, p. ej. para controlar la posición desde un punto programado hacia otro punto o para controlar un movimiento a lo largo de un recorrido continuo programado.
- G05B19/4093 G05B 19/00 […] › caracterizado por la programación de pieza, p. ej. introducción de información geométrica derivada de un dibujo técnico, combinación de esta información con la información de mecanizado y de material para obtener una información de control, llamada programa de pieza, para la máquina de control numérico (NC).
- G05B19/4103 G05B 19/00 […] › Interpolación digital.
PDF original: ES-2680349_T3.pdf
Patentes similares o relacionadas:
Dispositivo de control para máquina herramienta y máquina herramienta provista de dicho dispositivo de control, del 27 de Mayo de 2020, de CITIZEN WATCH CO. LTD.: Un dispositivo de control (C) para una máquina herramienta provisto en una máquina herramienta que tiene una herramienta de corte para cortar una pieza […]
Equipo de control con optimizador integrado, del 11 de Marzo de 2020, de SIEMENS AKTIENGESELLSCHAFT: Equipo de control para una maquina con al menos un eje , en donde el equipo de control esta programado con un programa de sistema, en donde el equipo de control […]
Sistema y procedimiento de fabricación de máscaras de protección de vehículos, del 15 de Enero de 2020, de Slingerland Distribution SA: Sistema de corte de máscaras de protección de una parte de un vehículo, que comprende: - una máquina (MAC) de corte de máscaras en un material […]
Método de postprocesador de máquina de aplicación de material compuesto de cabezales múltiples y aparato para fabricar estructuras compuestas, del 23 de Octubre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para producir un programa para operar una máquina de aplicación de material compuesto de múltiples cabezales para producir una pieza […]
Aparato de control numérico, del 11 de Septiembre de 2019, de MITSUBISHI ELECTRIC CORPORATION: Un dispositivo de control numérico para mecanizar un objeto de mecanizado moviendo una herramienta y el objeto de mecanizado uno en relación […]
Dispositivo de configuración del número de compensación, del 21 de Agosto de 2019, de CITIZEN WATCH CO. LTD.: Un dispositivo de configuración del número de compensación que comprende: un monitor que muestra una pantalla de selección de superficie de […]
 Procedimiento para optimizar un programa de robot de una unidad de robot de soldadura, del 31 de Julio de 2019, de ABB SCHWEIZ AG: Un procedimiento para optimizar un programa de robot de una unidad de robot de soldadura , en el que el procedimiento comprende:
- recopilar en un archivo […]
Procedimiento para optimizar un programa de robot de una unidad de robot de soldadura, del 31 de Julio de 2019, de ABB SCHWEIZ AG: Un procedimiento para optimizar un programa de robot de una unidad de robot de soldadura , en el que el procedimiento comprende:
- recopilar en un archivo […]
 Diseño de sobrante sin secciones, del 31 de Mayo de 2019, de Hexagon Manufacturing Intelligence Canada Limited: Un método para el diseño de un sobrante , en donde todo o parte del sobrante se diseña con un enfoque sin secciones, que comprende las etapas de: introducir […]
Diseño de sobrante sin secciones, del 31 de Mayo de 2019, de Hexagon Manufacturing Intelligence Canada Limited: Un método para el diseño de un sobrante , en donde todo o parte del sobrante se diseña con un enfoque sin secciones, que comprende las etapas de: introducir […]