SISTEMA DE APROXIMACION A UNA PLATAFORMA DE UN VEHICULO NO TRIPULADO MEDIANTE ANALISIS VISUAL.
Sistema de aproximación a una plataforma de un vehículo no tripulado mediante análisis visual.
Se reivindica un dispositivo y un sistema de aterrizaje/despegue de vehículos aéreos no tripulados o de atraque/partida de vehículos marinos no tripulados utilizando métodos de análisis visual. La solución consiste en el diseño de plataforma que contiene una figura geométrica de características inusuales. La imagen de esta plataforma se obtiene mediante una cámara digital, situada en el vehículo no tripulado y conectada a un dispositivo dotado con técnicas de tratamiento de imágenes, lo que permite conocer la orientación y posición relativas entre el vehículo y la plataforma con la figura que se reivindica.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201001592.
Solicitante: UNIVERSIDAD COMPLUTENSE DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: SÁNCHEZ BENITEZ,David, PAJARES MARTINSANZ,Gonzalo, DE LA CRUZ GARCIA,JESUS MANUEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G05D1/08 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la actitud, es decir, eliminación o reducción de los efectos del balanceo, cabeceo o guiñada.
Fragmento de la descripción:
SISTEMA DE APROXIMACIÓN A UNA PLATAFORMA DE UN VEHÍCULO NO TRIPULADO MEDIANTE ANÁLISIS VISUAL. SECTOR DE LA TÉCNICA 5 La invención se encuadra en el sector del control de la navegación de vehículos, más concretamente, en el de los vehículos no tripulados por el hombre. ESTADO DE LA TÉCNICA El aterrizaje de un vehículo aéreo es una de las fases más críticas de su operación. En los vehículos tripulados el piloto se vale, además de la instrumentación de a bordo, de 10 sus sentidos del equilibrio y de la vista para llevarla a cabo y fundamentalmente en la última fase, cuando es necesario utilizar toda la información necesaria para obtener una precisión que garantice el posado y parada del vehículo sin que éste sufra ningún daño. De manera similar, el atraque de un buque en un muelle necesita de la información 15 visual del piloto para su realización. Por ello, en los vehículos autónomos el uso de sistemas de visión artificial ha sido una elección natural para intentar dotar al vehículo de uno de los sentidos usados por los humanos en la misma tarea. Pero disponer de un sistema que capte información visual del entorno no es suficiente para asegurar el éxito de la tarea y es necesario que la 20 información visual pueda ser usada a un ritmo y con una precisión suficiente. Existen muchas formas de obtener información del espectro electromagnético mediante sensores conectados a unidades de proceso de la información. Los más utilizados son dispositivos que captan la radiación del espectro visible y dispositivos que captan la radiación infrarroja debida a la radiación térmica. En cualquiera de los 25 dos casos es necesario extraer información de las imágenes proporcionadas por las cámaras para tener cierto grado de conocimiento de la posición y orientación relativa del vehículo. con respecto al punto de aterrizaje/despegue o atraque/partida. La extracción de esta información requiere de un procesamiento de las imágenes. Existen muchas posibilidades de tratar las imágenes, lo importante es que los algoritmos usados sean capaces de proporcionar la información necesaria con la precisión y a la frecuencia suficientes para un correcto aterrizaje/ despegue o atraque/partida. 5 Para un vehículo aéreo no tripulado (Unmanned Aerial Vehicle, UAV) , capaz de despegar y aterrizar en vertical, el problema del aterrizaje está resuelto entonces si dispone de información sobre su posición y orientación relativas respecto al punto de aterrizaje y un sistema de control capaz de proporcionar las acciones sobre los actuadores que gobiernan el movimiento del vehículo. Estos hacen que la dinámica 10 del conjunto, control y UAV, sea tal que, con unas ciertas condiciones ambientales, el vehículo llega a posarse en dicho punto con un cierto grado de precisión. Lo que se puede extender al atraque y partida de una embarcación de superficie (Unmanned Marine Vehicle, UMV) con la diferencia existente en la dinámica de ambos y en sus actuadores. 15 El problema que se plantea entonces es cómo conseguir, a partir de imágenes, la información mínima necesaria con la precisión suficiente y a una frecuencia también suficiente para la dinámica de los vehículos no tripulados y su sistema de control, para que el vehículo aéreo pueda aterrizar y despegar, o la embarcación atracar y partir, de una posición prefijada. 20 Los elementos que intervienen y que influyen en las prestaciones que se consiguen en el aterrizaje o atraque y en los lugares donde es posible realizarlo son: el aparato captador, que varía según el tipo de sensor de imágenes; los objetos que se captan del entorno: emisores de luz, de infrarrojos o figuras específicas; el procesamiento que se realiza para extraer información relativa a la posición y orientación del vehículo; y el 25 algoritmo de control para el guiado del vehículo no tripulado hasta el punto de aterrizaje o atraque. Hasta ahora el aterrizaje de vehículos aéreos no tripulados UAVs se ha diseñado utilizando sistemas de visión por computador para guiar, o ayudar a guiar, al vehículo en su aterrizaje. En algunos de los casos el procedimiento se basaba en el 30 reconocimiento en la escena de una figura patrón, de marcas o de puntos singulares que ayuden a reconocer dichas estructuras con el fin de lograr el aterrizaje de los UAVs que dejan indeterminado el objeto de la visión. En el sistema propuesto por A. Cesetti et ál. (Italia, 2009) se obtienen puntos de referencia en el entorno para una posible identificación de un lugar para el aterrizaje. 5 El sistema intenta encontrar marcas naturales en la escena de exterior, por lo que no hace uso de ningún patrón pre-establecido y busca alguna concordancia de lugares en el entorno por comparación con los almacenados en una base de datos. En la patente US 20080215204 se muestra un sistema de comunicación para permitir el intercambio de información entre el UAV y un centro de control, entre la que se 10 considera la obtenida del entorno por un sistema de visión. Hay otros planteamientos para el sistema en los que se utilizan figuras para extraer información de la posición relativa entre la plataforma o elemento que contiene la figura y el U AV. Guili Xu et ál. (R.P. China, 2009) usan una figura geométrica en forma de T sobre una 15 plataforma de forma que, mediante la aplicación de técnicas de procesamiento de imágenes, se determina el ángulo que proporciona la orientación relativa de la figura y el UAV. Utilizan la radiación infrarroja para conseguir un gran contraste de temperatura entre la figura usada para identificar el lugar del aterrizaje y el entorno. El hecho de basarse en un dispositivo infrarrojo conlleva, por tanto, una complejidad 20 tecnológica superior a la usada en nuestro sistema y además la figura usada sólo permite determinar el ángulo de guiñada con respecto a la cámara. Sven Lange et ál. (Alemania, 2008) proponen el uso de una figura consistente en varios anillos blancos concéntricos sobre un fondo negro. Cada anillo posee una anchura específica para hacer posible su identificación y diferenciación de los demás. 25 Esta diferencia en anchura, o como se dice en el documento, diferencia entre el radio externo e interno del anillo, aumenta según nos alejamos del centro de la figura. Esto permite que, aún cuando no todos los anillos están dentro del campo visual, la parte de la plataforma visible sigua siendo identificable (este caso podría darse cuando el vehículo aéreo se encuentra a baja altitud) . Mediante el procesamiento de la imagen de 30 la figura se determina la altura a la que se encuentra la cámara. El documento supone que el vehículo aéreo siempre estará paralelo al suelo, por lo que no se preocupa de determinar ningún ángulo de inclinación/orientación a partir de la figura. De esta forma sólo se determina la altura con respecto a la figura y no se obtiene la orientación relativa de la figura y del UAV dado que la figura que consideran es 5 simétrica. Esto haría que la observación de la misma desde distintos posicionamientos del UAV pueda originar idénticas imágenes. Srikanth Saripalli et ál. (EE.UU., 2003) utilizan una plataforma también con una figura geométrica con la forma de una H en color blanco. Es la marca encontrada típicamente sobre helipuertos. De la figura captada por la cámara se extrae la posición 10 del centro de gravedad de la imagen, en un plano x-y, de ésta en relación al UAV y el ángulo de orientación de la figura con respecto al UAY. Con este método no se determinan la altura del vehículo ni los ángulos de cabeceo y alabeo. Por otro lado, dada la simetría del patrón H con respecto a la línea central, la imagen es la misma tanto si se observa desde la parte superior como la inferior, no 15 siendo posible la orientación precisa del vehículo en este caso. Por otra parte, el hecho de que las operaciones de despegue y aterrizaje se realicen en entornos de exterior, hace que las imágenes estén sometidas a efectos colaterales procedentes de la iluminación haciendo que aparezcan reflejos u otros fenómenos, que originan la desaparición de algunas partes de la figura en la imagen. Cuando esto ocurre, la figura 20 se hace prácticamente irreconocible, siendo realmente imposible la determinación de los ángulos anteriores. Cor y S. Sharp et ál. (EE.UU., 2001) hacen uso de una figura construida a partir de seis cuadrados blancos, cinco de ellos de igual tamaño, incluidos en otro cuadrado mayor de color negro, que a su vez está incluido en otro cuadrado blanco. Del procesamiento 25 de la imagen se determina la posición y la orientación relativas de la figura y el UAV, si bien el procedimiento de procesamiento es más complejo que el que constituye el objeto de esta invención. De su figura se necesita extraer las esqumas de los cuadrados y que éstas se encuentren alineadas para...
Reivindicaciones:
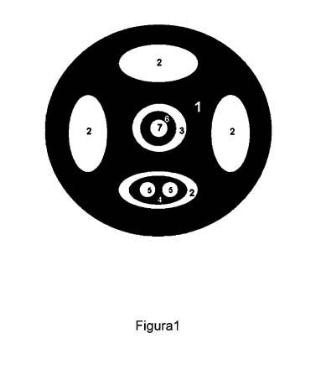
1. Procedimiento de aproximación a una plataforma de un vehículo no tripulado mediante análisis visual caracterizado porque comprende al menos las siguientes fases: toma de imágenes de la zona de aproximación secuencialmente por una cámara situada en el vehículo no tripulado; análisis de las imágenes mediante una unidad de procesado; extracción de la región en la que se encuentra la figura patrón; obtención de una imagen complementaria a la original; puesta en binario de la imagen para tener una imagen con sólo dos tonos o valores en ella; cálculo de las coordenadas de los centros de masas (10, 11 Y 12) de cada imagen para cada figura geométrica, la circular principal (1) y las secundarias elipsoidal (4) Y circular (6) ; cálculo de las distancias entre los centros de masa: una horizontal, "Drx" , y otra vertical "Dr y "; cálculo del ángulo de rotación o guiñada; cálculo del número de Euler para cada figura geométrica, la circular principal (1) Y las secundarias elipsoidal (4) Y circular (6) . 20 2. Aparato para la aproximación a una plataforma de un vehículo no tripulado mediante análisis visual para llevar a cabo el procedimiento según la reivindicación 1 caracterizado porque comprende: una plataforma con una figura patrón, un dispositivo de tratamiento de la señal, un algoritmo de tratamiento de la imagen captada y un sistema de control. 25 3. Aparato para la aproximación a una plataforma de un vehículo no tripulado mediante análisis visual según reivindicación 2 caracterizado porque la figura patrón consiste en una figura geométrica principal que contiene en su interior dos elementos secundarios; y porque el elemento principal (1) es un círculo, de radio determinado, con cuatro huecos elipsoidales (2) y un hueco circular central (3) ; 5 Y porque una de las figuras secundarias es una elipse (4) con dos huecos circulares (5) situada en el interior de un agujero elipsoidal (2) y la otra figura secundaria es un círculo (6) con un hueco circular (7) y está situado dentro del hueco circular central (3) . 4. Aparato para la aproximación a una plataforma de un vehículo no tripulado 10 mediante análisis visual según reivindicación 2 y 3 caracterizado porque los centros de los huecos elipsoidales (2) se sitúan simétricamente dos a dos respecto del centro del círculo (1) y porque dos huecos tienen su eje mayor en la dirección horizontal y los otros dos tienen su eje mayor en la dirección vertical. 5. Aparato para la aproximación a una plataforma de un vehículo no tripulado 15 mediante análisis visual según reivindicación 2 y 3 caracterizado porque la figura secundaria elipsoidal (4) es concéntrica con el hueco elipsoidal (2) que la contiene y porque es del mismo color que la figura geométrica principal (1) . 6. Aparato para la aproximación a una plataforma de un vehículo no tripulado mediante análisis visual según reivindicación 2 y 3 caracterizado porque la figura 20 secundaria circular (6) es concéntrica con el hueco (3) que la contiene y porque es del mismo color que la figura geométrica principal (1) . 7. Aparato para la aproximación a una plataforma de un vehículo no tripulado mediante análisis visual según reivindicaciones 2, 3 y 6 caracterizado porque los tres círculos (3, 6 y 7) son concéntricos entre sí y con el círculo principal (1) . 25 8. Aparato para la aproximación a una plataforma de un vehículo no tripulado mediante análisis visual según reivindicaciones 2, 3, 5, y 6 caracterizado porque el contraste de color entre las figuras (1, 4 y 6) y los huecos (2, 3, 5 y 7) es máximo. 9. Aparato para la aproximación a una plataforma de un vehículo no tripulado mediante análisis visual según reivindicación 2, 3, 5, 6 y 8 caracterizado porque los colores usados son negro para las figuras y blanco para los huecos. 10. Aparato para la aproximación a una plataforma de un vehículo no tripulado mediante análisis visual según reivindicación 2 y 3 caracterizado porque la figura secundaria circular (6) se sustituye por una reproducción de la figura principal a 5 menor escala y concéntrica con el hueco circular (3) que la contiene.
Patentes similares o relacionadas:
Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático, del 11 de Marzo de 2020, de SCHOTTEL GMBH: Procedimiento para amortiguar el movimiento de balanceo de un vehículo acuático alrededor del eje longitudinal (L) del mismo, en el que el vehículo acuático presenta […]
Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X, del 4 de Marzo de 2020, de ThyssenKrupp Marine Systems GmbH: Procedimiento para la compensación del bloqueo de una pala de timón en un timón en forma de X de un submarino, en donde el procedimiento exhibe las siguientes etapas: […]
Guía de aproximación de director de vuelo, del 6 de Noviembre de 2019, de THE BOEING COMPANY: Un método implementado por ordenador para proporcionar guiado durante una maniobra de aproximación de un avión , comprendiendo el método: determinar una […]
Filtro de Kalman modificado para la generación de correcciones de error de actitud, del 5 de Junio de 2019, de THE BOEING COMPANY: Medio de almacenamiento legible por ordenador que comprende instrucciones ejecutables por ordenador que, cuando se ejecutan por un ordenador , provocan que el ordenador: […]
Sistema de formación de imágenes espaciales en tres dimensiones, del 3 de Junio de 2019, de THALES: Sistema de formación de imágenes espaciales en tres dimensiones que comprende: - al menos dos satélites (Sat1, Sat2) en órbita geocéntrica en un mismo […]
 Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Método y aparato para la detección y gestión de fallos latentes para sistemas de control de vuelo por cable, del 29 de Mayo de 2019, de THE BOEING COMPANY: Sistema de control de aeronave que comprende:
sistemas de control de vuelo de piloto y copiloto (P, A), incluyendo cada uno un primer […]
Métodos y aparatos de notificación de una asimetría de vuelo que influye en una aeronave, del 15 de Mayo de 2019, de THE BOEING COMPANY: Un método, que comprende: monitorizar una característica de balanceo de una aeronave ; determinar una salida de un sistema de piloto automático […]
Piloto automático de vehículo volador, del 24 de Abril de 2019, de THE BOEING COMPANY: Un metodo implementado por ordenador para controlar un vehiculo volador, que comprende: recibir, por un piloto automatico (218A) del vehiculo […]