Un robot móvil autónomo.
Un robot móvil autónomo que comprende:
un chasis;
un sistema de accionamiento montado en el chasis;
un sistema de control en comunicación con el sistema de accionamiento;
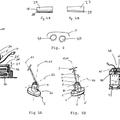
un cabezal (100, 300) de limpieza montado en el chasis y que presenta una caja (540) inferior;
un depósito (400) de recogida de basura montado en el chasis; y una ruta (200, 210, 392, 394) de aire de aspiradora que presenta una entrada (200, 392) de aspiradora y una salida (210, 394) de ruta de aire, estando la ruta (200, 210, 392, 394) de aire de aspiradora configurada para suministrar basura (D) desde el cabezal (100, 300) de limpieza hasta el depósito (400) de recogida de basura, extendiéndose la ruta (200, 210, 392, 394) de aire de aspiradora entre el cabezal (100, 300) de limpieza y el depósito (400) de recogida de basura;
en el que el cabezal (100, 300) de limpieza comprende:
un módulo de cabezal de limpieza conectado al chasis y que presenta un rodillo (110, 310) frontal que incluye un tubo (150, 350) flexible que cambia de forma frontal moldeado de manera solidaria con una pluralidad de aletas (160, 360) longitudinales distribuidas alrededor de la circunferencia del mismo; y
un rodillo (120, 320) trasero adyacente que incluye un tubo (150, 350) flexible que cambia de forma trasero y moldeado de manera solidaria con una pluralidad de aletas (160, 360) longitudinales distribuidas alrededor de la circunferencia del mismo, que se oponen de manera rotatoria con el mismo por debajo de la entrada (200, 392) de aspiradora;
en el que las aletas (160, 360) longitudinales son cada una menor de 2/3 del entrehierro (G) más estrecho entre el tubo (150, 350) flexible que cambia de forma frontal y el tubo (150, 350) flexible que cambia de forma trasero, que permite que las aletas (160, 360) longitudinales se agiten y dirijan basura a partir de una superficie de limpieza directamente por debajo del entrehierro (G) más estrecho al entrehierro (G) más estrecho.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2012/035898.
Solicitante: IROBOT CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 8 CROSBY DRIVE BEDFORD, MA 01730 ESTADOS UNIDOS DE AMERICA.
Inventor/es: GILBERT,DUANE LEIGH JR, BURSAL,FARUK HALIL, THERRIEN,RICHARD JOSEPH, MORIN,RUSSELL WALTER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47L11/40 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08). › A47L 11/00 Máquinas para limpiar los suelos, las alfombras, los muebles, las paredes o sus revestimientos. › Elementos o partes constitutivas de máquinas no previstas en los grupos A47L 11/02 - A47L 11/38, o no limitadas a uno de estos grupos, p. ej. empuñaduras, disposición de los interruptores, bordes, amortiguadores, palancas.
- A47L9/04 A47L […] › A47L 9/00 Partes constitutivas o accesorios de aspiradores, p. ej. medios mecánicos para controlar la aspiración o para producir una acción de batido; Dispositivos para la conservación ordenada de los aspiradores o de sus piezas; Vehículos portadores especialmente concebidos para los aspiradores. › con cepillos o agitadores controlados.
PDF original: ES-2723176_T3.pdf
Patentes similares o relacionadas:
 Aparato para el tratamiento de suelos guiado a mano, del 29 de Julio de 2020, de i-mop GmbH: Aparato para el tratamiento de suelos guiado a mano, que presenta una parte de suelo con al menos una herramienta para el tratamiento de suelos y un […]
Aparato para el tratamiento de suelos guiado a mano, del 29 de Julio de 2020, de i-mop GmbH: Aparato para el tratamiento de suelos guiado a mano, que presenta una parte de suelo con al menos una herramienta para el tratamiento de suelos y un […]
Aparato de limpieza de superficies, del 17 de Junio de 2020, de Bissell Homecare, Inc: Un aparato de limpieza de superficies , que comprende una carcasa que incluye un conjunto de mango vertical y una base montada […]
Dispositivo de limpieza con una placa oscilante accionada por motor, del 17 de Junio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Dispositivo de limpieza , especialmente para un aparato de limpieza en mojado , con una placa oscilante accionada por motor y con una placa de […]
Paño de limpieza para un dispositivo de limpieza, del 10 de Junio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Paño de limpieza para un dispositivo de limpieza , en especial para un dispositivo de limpieza accionado por motor, preferiblemente para su fijación […]
Limpiador de extracción, del 27 de Mayo de 2020, de BISSELL INC.: Un aparato de limpieza de superficies , que comprende: un alojamiento ; un sistema de suministro de fluido que comprende […]
Aparato de tratamiento de superficies, del 13 de Mayo de 2020, de Hawig Maschinenfabrik Gesellschaft mit beschränkter Haftung: Aparato de tratamiento de superficies (1, 1a, 1b) con una disposición de base (2, 2a), que se puede desplazar en una posición funcional sobre una superficie […]
Rodillo de limpieza, del 25 de Marzo de 2020, de VORWERK & CO. INTERHOLDING GMBH: Rodillo de limpieza para un aparato de limpieza destinado a tratar una superficie a limpiar, especialmente rodillo de fregado para un aparato de limpieza en […]
Aparato de limpieza de superficie, del 19 de Febrero de 2020, de Bissell Homecare, Inc: Un aparato de limpieza de superficies, que comprende una carcasa que incluye un conjunto de mango superior y una base montada en el conjunto de mango y adaptada […]