Manipulador para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricos en un sistema de almacenamiento automatizado.
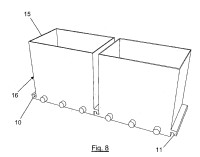
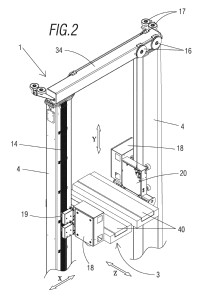
(13/11/2013) Manipulador para el mantenimiento en particular de cuerpos sustancialmente paralelepipédicos o cilíndricosen un sistema de almacenamiento automatizado , del tipo que comprenden un dispositivo de agarre , queestá previamente dispuesto sobre una placa para soportar cuerpos paralelepipédicos o cilíndricos que hay quetransportar, dicha placa estando a su vez soportada por un conjunto para mover dicho manipulador ,dicho dispositivo de agarre comprendiendo dos hojas mutuamente opuestas , unos primeros medios de movimiento de translación de dichas hojas en una primera dirección (X) identificada como la dirección haciauna cinta transportadora o una estantería de almacenamiento dispuesta enfrente, y unos segundos medios demovimiento de translación en una…
{kind=link}
{kind=link}