Sistema de estanterias y procedimiento para el almacenamiento automatizado de mercancía en fardos pequeños.
Sistema de estanterias (1, 1', 1") para el almacenamiento automatizado de mercancía en bultos pequeños(13),
que comprende:
- varios segmentos de armario (6), en donde los segmentos de armario (6) están dispuestos uno al lado de otro, a lolargo de una guía para los segmentos de armario (6) que se extiende en un sentido (A) de movimiento para lossegmentos de armario (6) y pueden desplazarse de manera independente los unos de los otros en el sentido (A) delmovimiento por la guía, de manera que se puede arreglar una hendidura (3) por lo menos entre dos segmentos dearmario (6) dispuestos uno al lado de otro, o entre una pieza lateral (22) del sistema de estanteria (1,1', 1") y unsegmento de armario (6) adyacente;
- una guía horizontal y vertical que es accionada por un motor eléctrico y presenta un sistema de ejes; y
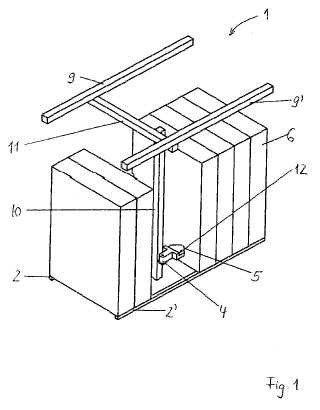
- un dispositivo de transporte de bultos (12), mediante el cual la mercancia en bultos pequeños (13) puede serdepositada en los segmentos de armario (6) y ser extraída de los segmentos de armario (6), pudiendo serposicionado el dispositivo de transporte de bultos (12) a través de la guía horizontal y vertical delante de al menosuno de los segmentos de armario (6), y pudiendo ser desplazado el dispositivo de transporte de bultos (12) a travésde la guía horizontal y vertical en la guía horizontal y vertical en el sentido (A) del movimiento de los segmentos dearmario (6) así como en dos sentidos de movimiento adicionales, de modo perpendicular respecto al sentido (A) demovimiento de los segmentos de armario (6), de manera independente de los segmentos de armario (6) pero, noobstante, siempre en relación con los segmentos de armario (6), libremente en el sistema cartesiano del sistema deestanteria (1, 1', 1"), pudiendo ser posicionado de este modo en la hendidura (3),
estando la guía horizontal y vertical para el dispositivo de transporte de bultos (12) y la guía para los segmentos dearmario (6) desacopladas una de la otra, y siendo el dispositivo de transporte de bultos (12) un robot de alimentacióno de extracción,
caracterizado porque el dispositivo de transporte de bultos (12) dispone de un eje de rotación vertical (4), y porqueel dispositivo de transporte de bultos (12) puede girar alrededor de su propio eje de rotación (4) por al menos 180°,pudiendo efectuar movimientos de giro y de traslación,
y porque bien
- el sistema de ejes presenta un eje vertical (10), dos ejes horizontales (9, 9') en el sentido (A) del movimiento de lossegmentos de armario (6), y un tercer eje horizontal (11) transversal con respecto al sentido (A) del movimiento delos segmentos de armario (6), que conecta los dos ejes horizontales (9, 9') que se extienden en el sentido (A) delmovimiento de los segmentos de armario (6) uno con el otro, estando el eje vertical (10) conectado de maneramovible con el tercer eje horizontal (11) que puede desplazarse lateralmente y por motor, de modo que el eje vertical(10) con el dispositivo de transporte de bultos (12) puede desplazarse en la hendidura (3) de un lado hacia otro,pudiendo ser introducido en la hendidura (3) y ser extraido de la misma, en donde el dispositivo de transporte debultos (12) puede desplazarse a lo largo del eje vertical (10), saliendo hacia arriba fuera de la hendidura (3),pudiendo disponerse encima de los segmentos de armario (6) y pudiendo alejarse de la hendidura (3); bien
- el sistema de ejes presenta un eje vertical (10), dos ejes horizontales (9, 9") en el sentido (A) del movimiento delos segmentos de armario (6), y un tercer eje horizontal (11) transversal con respecto al sentido (A) del movimientode los segmentos de armario (6), en donde el eje vertical (10) conecta los dos ejes horizontales (9, 9'') que seextienden en el sentido (A) del movimiento de los segmentos de armario (6) uno con el otro, en donde el tercer ejehorizontal (11) puede sobresalir lateralmente dentro del sistema de estanterias (1') y posicionarse en la hendidura(3) entre los segmentos de armario (6) con el dispositivo de transporte de bultos (12), pudiendo desplazarse eldispositivo de transporte de bultos (12) a lo largo del tercer eje horizontal (11), siendo libremente desplazable encimade los segmentos de armario (6) por la guía horizontal y vertical que dispone del sistema de ejes; o bien
- el sistema de ejes presenta un primer y un segundo eje vertical (10, 10'), un primer y un segundo eje horizontal (9",9'") en el sentido (A) del movimiento de los segmentos de armario (6), y un tercer eje horizontal (11) que se extiendetransversalmente al sentido (A) del movimiento de los segmentos de armario (6) y que conecta el primer y elsegundo eje vertical (10, 10') el uno con el otro, siendo guiado el primer eje vertical (10) a través del primer ejehorizontal (9") y el segundo eje vertical (10') a través del segundo eje horizontal (9"'), en donde el dispositivo detransporte de bultos (12) puede desplazarse a lo largo del tercer eje horizontal (11), pudiendo desplazarselibremente a través de la guía horizontal y vertical que dispone del sistema de ejes, a lo largo de la vía de guía paralos segmentos de armario (6) así como de manera transversal y vertical con respecto a la vía de guía para lossegmentos de armario (6).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07003017.
Solicitante: GOLLMANN KOMMISSIONIERSYSTEME GMBH.
Nacionalidad solicitante: Alemania.
Dirección: EDMUND-VON-LIPPMANN-STRASSE 13-15 06112 HALLE ALEMANIA.
Inventor/es: GOLLMANN,DANIEL.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G1/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › mecánicos.
- B65G1/10 B65G 1/00 […] › con soportes relativamente móviles para facilitar la inserción o la retirada de objetos.
PDF original: ES-2418839_T3.pdf
Fragmento de la descripción:
Sistema de estanterias y procedimiento para el almacenamiento automatizado de mercancía en fardos pequeños El presente invento se refiere a un sistema de estanterias para el almacenamiento automatizado de mercancía en fardos pequeños, con varios segmentos de armario y un dispositivo de transporte de bultos mediante el cual la mercancia en bultos pequeños puede ser depositada en los segmentos de armario y ser extraída de los segmentos de armario, pudiendo ser posicionado el dispositivo de transporte de bultos a través de una guía horizontal y vertical accionada por un motor eléctrico delante de al menos uno de los segmentos de armario. El invento se refiere asimismo a un procedimiento para el almacenamiento automatizado de mercancía en bultos pequeños, con un sistema de estanterias con varios segmentos de armario, en donde la mercancía en fardos pequeños es depositada mediante un dispositivo de transporte de bultos en los segmentos de armario y extraída de los segmentos de armario, y en donde el dispositivo de transporte de bultos es posicionado a través de una guía horizontal y vertical accionada por un motor eléctrico delante de al menos uno de los segmentos de armario.
De acuerdo con el estado de la técnica, el almacenamiento de mercancía en fardos pequeños, como por ejemplo medicamentos en forma confeccionada, experimenta un aumento de importancia, en particular considerando el progreso de la técnica de automatización.
Una solución controlada por ordenador es ofrecida por el dispositivo descrito en el documento DE 201 22 458 U1. En este caso, se describe un dispositivo activable automáticamente en el centro entre dos estanterías, para extraer empaques de medicamentos de una estantería y para desalmacenarlos en un dispositivo opuesto de desalmacenamiento. En principio, de esta manera varias estanterías pueden ser manejadas al mismo tiempo, lo que aumenta, sin embargo, el esfuerzo constructivo para instalar dispositivos adicionales de desalmacenamiento. El arreglo descrito no permite la manejabilidad de ambos lados de la estantería con un dispositivo de desalmacenamiento.
En el documento DE 103 00 164 A1 se propone un procedimiento y un dispositivo para confeccionar productos en fardos pequeños, en particular para el suministro en farmacias. Los empaques individuales se registran según el tipo del medicamento contenido, el tamaño del empaque y otros datos, y se almacenan en el espacio mínimo posible.
En el documento DE 101 25 287 B4 con el título “Regallager für eine chaotische Ablage von Stückgütern” (estantería para el almacenamiento caótico de mercancía en fardos) se propone el depósito en poco espacio de empaques de medicamentos en una estanteria de farmacia que se encuentra en un almacén. Los empaques alineados de manera aproximada sobre una cinta transportadora de almacenamiento son identificados por ejemplo a través de un código de barras, medidos en sus longitudes de borde y transportados a los estantes apropiados. A este efecto, sensores están instalados en el dispositivo de manipulación con una pinza. El dispositivo se caracteriza sobre todo por el uso de una pinza de apriete que trabaja de modo modificado, y por la existencia de una cinta de almacenamiento y una cinta transportadora acumuladora. Tambien en este caso, el almacenamiento o la extracción solamente es posible en un lado de la estantería o en estanterías que están opuestas en respectivamente un lado, y hace falta un esfuerzo constructivo y espacio considerable para eventualmente ampliar este dispositivo.
Las soluciones descritas tratan de simplificar el confeccionamiento, depósito y la extracción de empaques de medicamentos mediante mejoras por etapas, y de aliviar a los empleados en las farmacias frente a actividades aburridas de clasificación, registro y vigilancia. Ello es posible solamente hasta un cierto grado utilizando técnicas de manipulación controladas por ordenador y estanterías accionables automáticamente. Incluso el almacenamiento caótico, introducido recientemente, en el cual no se toma en consideración el medicamento embalado para la asignación del tratamiento de determinado cuadro de tratamiento o enfermedad, no aporta el efecto máximo de utilización de espacio si solamente se trabaja en un lado de la estantería o en los lados de estanterías enfrentadas. En este sentido, los estantes o estanterías utilizadas hasta el momento no pueden ser ampliados de modo ilimitado en su altura y profundidad porque, en este caso, particularmente los dispositivos de manejo se vuelven demasiado abultados e ya no son controlables en sus movimientos.
Un sistema de estantería y un procedimiento del tipo arriba mencionado se conocen por el documento DE 200 21 440 U1. Este documento revela un dispositivo para el almacenamiento automatizado de mercancía en fardos pequeños, en particular de empaques de medicamentos en farmacias en donde, según una variante de realización, están provistos dos estantes enfrentados, entre los cuales está dispuesto un dispositivo de sujeción con el cual la mercancía en fardos puede depositarse en los estantes y extraerse de los mismos. El dispositivo de sujeción puede desplazarse de un lado hacia otro, a lo largo de una guía horizontal, delante de los estantes, y puede desplazarse hacia arriba y abajo en una guía vertical para poder alcanzar fondos determinados en los estantes. La mercancía en fardos es transportada mediante una pinza aspiradora provista en el dispositivo de sujeción, de modo que la pinza aspiradora dispone de una cabeza aspiradora desplazable hacia delante y atrás, y mordazas laterales de sujeción para la mercancia en fardos pequeños. En los estantes, parcialmente productos diferentes están almacenados en la misma posición en el estante, los unos tras los otros, para poder aprovecharse de manera optimizada de la profundidad del fondo de la estantería. De esta manera, el dispositivo de sujeción siempre extrae de los fondos los productos almacenados delante, y también deposita los productos nuevos en el lugar más avanzado en el fondo del estante.
El dispositivo conocido presenta la desventaja de que es poco flexible, por la disposición de la guía horizontal y vertical entre los estantes, y que necesita mucho espacio. Adicionalmente, el principio de extracción y depósito descrito en el documento DE 200 21 440 U1 siempre toma en consideración únicamente los empaques de medicamentos que se encuentran más avanzados en los estantes, mientras que los empaques que se encuentran en las zonas posteriores y que pueden presentar eventualmente una fecha de caducidad anterior que los empaques avanzados, son extraídos más tarde de la estantería que los empaques que se encuentra delante.
Adicionalmente el almacenamiento de mercancía en fardos pequeños los unos tras los otros dentro de un compartimento de almacenamiento presenta la desventaja de que se necesita mucho tiempo para el desalmacenamiento. Para extraer, por ejemplo, un empaque depositado en la parte trasera de un compartimento, esencialmente tres procesos son necesarios: todos los empaques que se encuentran en el compartimento deben ser desalmacenados, después hay que separar empaques individuales y los empaques restantes deben volver a almacenarse. Para muchos usuarios de estos sistemas de almacenamiento, una inversión de tiempo tan importante no es aceptable. Además, durante el almacenamiento y desalmacenamiento de compartimentos que reciben varios empaques, existe una inseguridad de proceso considerable porque los empaques almacenados uno tras otro se acumulan en su longitud y en las tolerancias relacionadas, de modo que puede haber problemas para agarrar el empaque realmente solicitado. En caso del almacenamiento de empaques uno tras otro también pueden engancharse las orejas de los empaques cuando se almacenan, desalmacenan o cambian de sitio. En suma, el almacenamiento de empaques uno tras otro en un compartimento permite aprovechar bien el espacio ofrecido por estos almacenes automatizados, pero este principio también da el resultado de que la mercancía en fardos pequeños a ser extraída solamente puede almacenarse y desalmacenarse de manera muy lenta, y además existe una inseguridad considerable en lo que se refiere a la extracción de la mercanía de fardos pequeños.
El documento JP 53 034278 describe un sistema de almacenamiento automatizado. El sistema de almacenamiento comprende una pluralidad de segmentos de armario que pueden desplazarse a lo largo de dos carriles de guía paralelos, dispuestos por encima de los segmentos de armario, de tal modo que es posible introducir una hendidura entre dos segmentos de armario. Los segmentos de armario son guiados sobre el fondo del sistema de almacenamiento igualmente por dos carriles de guía de fondo, dispuestos paralelos... [Seguir leyendo]
Reivindicaciones:
1. Sistema de estanterias (1, 1’, 1") para el almacenamiento automatizado de mercancía en bultos pequeños (13) , que comprende:
- varios segmentos de armario (6) , en donde los segmentos de armario (6) están dispuestos uno al lado de otro, a lo largo de una guía para los segmentos de armario (6) que se extiende en un sentido (A) de movimiento para los segmentos de armario (6) y pueden desplazarse de manera independente los unos de los otros en el sentido (A) del movimiento por la guía, de manera que se puede arreglar una hendidura (3) por lo menos entre dos segmentos de armario (6) dispuestos uno al lado de otro, o entre una pieza lateral (22) del sistema de estanteria (1, 1’, 1") y un segmento de armario (6) adyacente;
- una guía horizontal y vertical que es accionada por un motor eléctrico y presenta un sistema de ejes; y
-
- un dispositivo de transporte de bultos (12) , mediante el cual la mercancia en bultos pequeños (13) puede ser depositada en los segmentos de armario (6) y ser extraída de los segmentos de armario (6) , pudiendo ser posicionado el dispositivo de transporte de bultos (12) a través de la guía horizontal y vertical delante de al menos uno de los segmentos de armario (6) , y pudiendo ser desplazado el dispositivo de transporte de bultos (12) a través de la guía horizontal y vertical en la guía horizontal y vertical en el sentido (A) del movimiento de los segmentos de armario (6) así como en dos sentidos de movimiento adicionales, de modo perpendicular respecto al sentido (A) de movimiento de los segmentos de armario (6) , de manera independente de los segmentos de armario (6) pero, no obstante, siempre en relación con los segmentos de armario (6) , libremente en el sistema cartesiano del sistema de estanteria (1, 1’, 1") , pudiendo ser posicionado de este modo en la hendidura (3) , estando la guía horizontal y vertical para el dispositivo de transporte de bultos (12) y la guía para los segmentos de armario (6) desacopladas una de la otra, y siendo el dispositivo de transporte de bultos (12) un robot de alimentación
o de extracción,
caracterizado porque el dispositivo de transporte de bultos (12) dispone de un eje de rotación vertical (4) , y porque el dispositivo de transporte de bultos (12) puede girar alrededor de su propio eje de rotación (4) por al menos 180°, pudiendo efectuar movimientos de giro y de traslación, y porque bien
-el sistema de ejes presenta un eje vertical (10) , dos ejes horizontales (9, 9’) en el sentido (A) del movimiento de los segmentos de armario (6) , y un tercer eje horizontal (11) transversal con respecto al sentido (A) del movimiento de los segmentos de armario (6) , que conecta los dos ejes horizontales (9, 9’) que se extienden en el sentido (A) del movimiento de los segmentos de armario (6) uno con el otro, estando el eje vertical (10) conectado de manera movible con el tercer eje horizontal (11) que puede desplazarse lateralmente y por motor, de modo que el eje vertical
(10) con el dispositivo de transporte de bultos (12) puede desplazarse en la hendidura (3) de un lado hacia otro, pudiendo ser introducido en la hendidura (3) y ser extraido de la misma, en donde el dispositivo de transporte de bultos (12) puede desplazarse a lo largo del eje vertical (10) , saliendo hacia arriba fuera de la hendidura (3) , pudiendo disponerse encima de los segmentos de armario (6) y pudiendo alejarse de la hendidura (3) ; bien
-el sistema de ejes presenta un eje vertical (10) , dos ejes horizontales (9, 9") en el sentido (A) del movimiento de los segmentos de armario (6) , y un tercer eje horizontal (11) transversal con respecto al sentido (A) del movimiento de los segmentos de armario (6) , en donde el eje vertical (10) conecta los dos ejes horizontales (9, 9’’) que se extienden en el sentido (A) del movimiento de los segmentos de armario (6) uno con el otro, en donde el tercer eje horizontal (11) puede sobresalir lateralmente dentro del sistema de estanterias (1’) y posicionarse en la hendidura
(3) entre los segmentos de armario (6) con el dispositivo de transporte de bultos (12) , pudiendo desplazarse el dispositivo de transporte de bultos (12) a lo largo del tercer eje horizontal (11) , siendo libremente desplazable encima de los segmentos de armario (6) por la guía horizontal y vertical que dispone del sistema de ejes; o bien
- el sistema de ejes presenta un primer y un segundo eje vertical (10, 10’) , un primer y un segundo eje horizontal (9", 9’") en el sentido (A) del movimiento de los segmentos de armario (6) , y un tercer eje horizontal (11) que se extiende transversalmente al sentido (A) del movimiento de los segmentos de armario (6) y que conecta el primer y el segundo eje vertical (10, 10’) el uno con el otro, siendo guiado el primer eje vertical (10) a través del primer eje horizontal (9") y el segundo eje vertical (10’) a través del segundo eje horizontal (9"’) , en donde el dispositivo de transporte de bultos (12) puede desplazarse a lo largo del tercer eje horizontal (11) , pudiendo desplazarse libremente a través de la guía horizontal y vertical que dispone del sistema de ejes, a lo largo de la vía de guía para los segmentos de armario (6) así como de manera transversal y vertical con respecto a la vía de guía para los segmentos de armario (6) .
2. Sistema de estanterias de acuerdo con la reivindicacion 1, caracterizado porque los segmentos de armario (6) son guiados a través de carriles horizontales de guía (2, 2’) .
3. Sistema de estanterias de acuerdo con una de las reivindicaciones antecedentes, caracterizado porque los segmentos de armario (6) presentan compartimientos de almacenamiento (7) con una profundidad determinada por una pared posterior (20) de compartimiento de almacenamiento, y porque los compartimientos de almacenamiento (7) están configurados para recibir respectivamente un único producto en bultos (13) .
4. Sistema de estanterias de acuerdo con la reivindicacion 3, caracterizado porque los compartimientos de almacenamiento (7) están realizados a partir de fondos de aluminio plegados.
5. Sistema de estanterias de acuerdo con la reivindicacion 3 o 4, caracterizado porque los compartimientos de almacenamiento (7) están inclinados de modo descendiente desde delante hacia detrás.
6. Sistema de estanterias de acuerdo con una de las reivindicaciones antecedentes, caracterizado porque el dispositivo de transporte de bultos (12) comprende una cabeza aspiradora (5) que puede desplazarse hacia delante y detrás, y no presenta elementos laterales de agarre.
7. Sistema de estanterias de acuerdo con una de las reivindicaciones antecedentes, caracterizado porque en el dispositivo de transporte de bultos (12) están provistos unos sensores para captar el tamaño y/o la posición y/o datos de identificación del producto de bultos a transportar (13) .
8. Sistema de estanterias de acuerdo con una de las reivindicaciones antecedentes, caracterizado porque los segmentos de armario (6) pueden extraerse con independencia uno del otro, en sentido horizontal, perpendicular con respecto al sentido (A) del movimiento de los segmentos de armario (6) definido por su guía.
9. Procedimiento para el almacenamiento automatizado de productos en bultos pequeños (13) , con un sistema de estantería (1, 1’, 1") con varios segmentos de armario (6) , en donde
-al menos uno de estos segmentos de armario (6) es desplazado a lo largo de un sentido de movimiento (A) a través de una guía de tal manera que se produce una hendidura (3) por lo menos entre dos segmentos de armario
(6) dispuestos uno al lado de otro, o entre una pared lateral (22) del sistema de estanterias (1, 1’, 1") y un segmento de armario adyacente (6) ,
-los productos en pequeños bultos (13) son depositados mediante un dispositivo de transporte de bultos (12) en los segmentos de armario (6) y son extraídos de los segmentos de armario (6) , y
-el dispositivo de transporte de bultos (12) es posicionado a través de una guía horizontal y vertical, que es accionada por un motor eléctrico y dispone de un sistema de ejes, delante de al menos uno de los segmentos de armario (6) , siendo desplazado el dispositivo de transporte de bultos (12) , con independencia de los segmentos de armario (6) , pero siempre libremente en relación con los segmentos de armario (6) , libremente en el sistema cartesiano del sistema de estantería (1) por la guía horizontal y vertical, desacoplada de la guía para los segmentos de armario (6) , en el sentido (A) de movimiento de los segmentos de armario (6) de tal modo que se encuentra a la altura de la hendidura (3) , el dispositivo de transporte de bultos (12) es posicionado a continuación en la hendidura
(3) de modo perpendicular respecto al sentido (A) de movimiento de los segmentos de armario (6) , siendo el dispositivo de transporte de bultos (12) un robot de alimentación y de extracción, caracterizado porque la guía horizontal y vertical es realizada por el sistema de ejes, que presenta bien
-un eje vertical (10) , dos ejes horizontales (9, 9’) en el sentido (A) de movimiento de los segmentos de armario (6) y un tercer eje horizontal (11) transversal con respecto al sentido (A) de movimiento de los segmentos de armario (6) que conecta los dos ejes horizontales (9, 9’) que se extienden en el sentido (A) de movimiento de los segmentos de armario (6) uno con el otro, estando conectado el eje vertical (10) de manera movible con el tercer eje horizontal (11) que puede desplazarse lateralmente y por motor, de modo que el eje vertical (10) puede desplazarse con el dispositivo de transporte de bultos (12) a lo largo del tercer eje horizontal (11) de un lado hacia otro en la hendidura
(3) y puede introducirse en la hendidura (3) y extraerse de la misma, pudiendo desplazarse el dispositivo de transporte de bultos (12) a lo largo del eje vertical (10) hacia arriba, fuera de la hendidura (3) y disponerse encima de los segmentos de armario (6) y alejarse de la hendidura (3) ; bien
-
- un eje vertical (10) , dos ejes horizontales (9, 9") en el sentido (A) de movimiento de los segmentos de armario (6) y un tercer eje horizontal (11) transversal con respecto al sentido (A) de movimiento de los segmentos de armario (6) , en donde el eje vertical (11) conecta los dos ejes horizontales (9, 9’’) que se extienden en el sentido (A) de movimiento de los segmentos de armario (6) uno con el otro, de modo que el tercer eje horizontal (11) puede sobresalir lateralmente dentro del sistema de estanterías (1’) y puede posicionarse en la hendidura (3) entre los segmentos de armario (6) con el dispositivo de transporte de bultos (12) , pudiendo desplazarse el dispositivo de transporte de bultos (12) a lo largo del tercer eje horizontal (11) y a través de la guía horizontal y vertical que comprende el sistema de ejes, libremente encima de los segmentos de armario (6) ; o
-un primer y un segundo eje vertical (10, 10’) , un primer y un segundo eje horizontal (9", 9’") en el sentido (A) de movimiento de los segmentos de armario (6) , y un tercer eje horizontal (11) que se extiende transversalmente respecto al sentido (A) de movimiento de los segmentos de armario (6) y conecta el primer y el segundo eje vertical (10, 10’) uno con el otro, de modo que el primer eje vertical (10) es guiado a través del primer eje horizontal (9") y el
segundo eje vertical (10’) es guiado a través del segundo eje horizontal (9’") , pudiendo desplazarse el dispositivo de transporte de bultos (12) a lo largo del tercer eje horizontal (11) , siendo movible libremente a través de la guía horizontal y vertical que dispone del sistema de ejes, a lo largo de la vía de guía para los segmentos de armario (6) así como transversalmente y perpendicularmente con respecto a la vía de guía para los segmentos de armario (6) ,
- en donde el dispositivo de transporte de bultos (12) realiza unos movimientos de giro y de traslación, y es movido de modo giratorio por al menos 180º alrededor de su propio eje de rotación (4) para el depósito y la extracción de productos en bultos pequeños (13) .
10. Procedimiento de acuerdo con la reivindicación 9, caracterizado porque los segmentos de armario (6) son 15 desplazados a lo largo de unos carriles horizontales de guía (2, 2’) .
11. Procedimiento de acuerdo con la reivindicación 9 o 10, caracterizado porque el dispositivo de transporte de bultos (12) , al extraer un producto de bulto pequeño (13) del compartimiento de almacenamiento (7) de un segmento de armario (6) penetra tan lejos dentro del compartimiento de almacenamiento (7) que el producto de bulto pequeño (13) a ser extraido topa contra una pared posterior (20) del compartimiento de almacenamiento (7) , y porque el producto de bulto pequeño (13) es aspirado por una cabeza aspiradora (5) del dispositivo de transporte de bultos (12) y extraído del compartimiento (7) , sin que el producto de bulto pequeño (13) sea agarrado lateralmente por el dispositivo de transporte de bultos (12) .
12. Procedimiento de acuerdo con una de las reivindicaciones 9 a 11, caracterizado porque el tamaño y/o la posición y/o los datos de identificación del producto de bulto pequeño (13) a ser transportado son captados mediante unos sensores provistos en el dispositivo de transporte de bultos (12) .
Patentes similares o relacionadas:
Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, del 27 de Julio de 2020, de RUIZ DE LARA REDONDO, José Antonio: Sistema de vías con nodos de intercomunicación dispuestos en la vertical y los vehículos con doble sistema de sustentación que discurren por ellas, capaces de trasladarse […]
Sistema de almacenamiento en estantería con realimentación de energía, del 1 de Julio de 2020, de KNAPP LOGISTIK AUTOMATION GMBH: Sistema de almacenamiento en estantería con al menos dos unidades de estantería (1a-1d), presentando cada unidad de estantería un dispositivo […]
Sistema de preparación para la expedición con un robot de transporte para pasar por debajo de estanterías individuales y carros de transporte, del 13 de Mayo de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos almacenados en un almacén con estanterías en bolsas de transporte con […]
Dispositivo para transferencia de artículos e instalación para transporte de artículos, del 6 de Mayo de 2020, de DAIFUKU CO., LTD.: Dispositivo para transferencia de artículos (2B, 2C) configurado para desplazar un artículo (W) a lo largo de una dirección de transferencia (Y) […]
Procedimiento de recogida de objetos con robots lanzadera, del 22 de Abril de 2020, de SOLYSTIC: Procedimiento de procesamiento de objetos en un centro logístico que comprende una zona de almacenaje de los objetos dividida en segmentos de almacenaje adyacentes […]
Procedimiento y dispositivo para el almacenamiento y recuperación o reubicación de contenedores en almacenes de gran altura, del 4 de Marzo de 2020, de AMOVA GmbH: Procedimiento para almacenar y recuperar o reubicar contenedores en almacenes de gran altura de una instalación de transbordo, […]
Dispositivo lanzadera de almacén, y sistemas y métodos que lo incorporan, del 4 de Marzo de 2020, de Majied, Fadi Mohammad Majed Hussain Abdel: Sistema para desplazar palés que comprende: una rejilla rectangular que comprende carriles laterales orientados a lo largo de un eje x y carriles ortogonales […]
Sistema de preparación para la expedición de artículos para la preparación de pedidos y de lotes, del 19 de Febrero de 2020, de KNAPP AG: Sistema de preparación para la expedición para preparar para la expedición artículos desde contenedores de almacenamiento en contenedores […]