Aparato para controlar un vehículo utilitario que navega de forma autónoma.
Un aparato para controlar la operación de un vehículo utilitario (10) que navega de forma autónoma adaptado para recorrer una zona de trabajo (37) definida por un alambre de limitación (38) tendido para realizar el trabajo de manera autónoma,
que comprende:
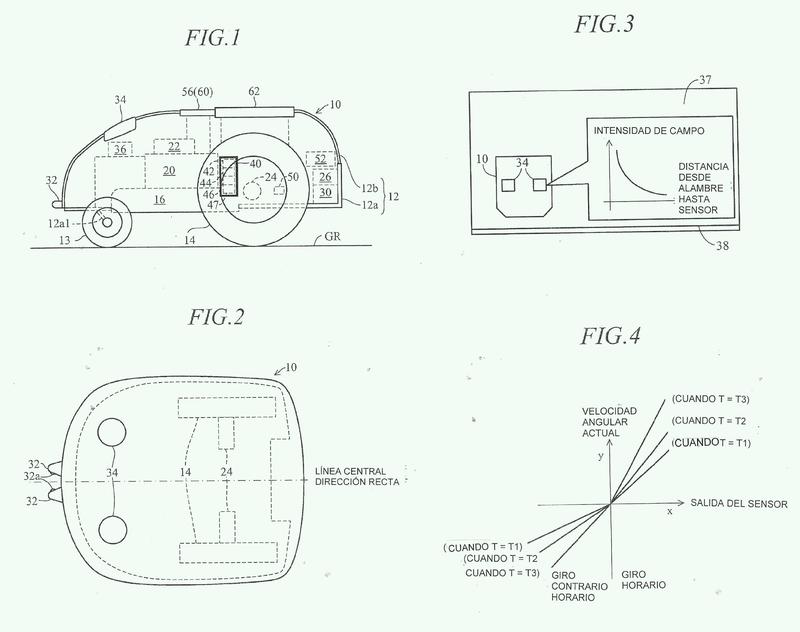
una pareja de sensores magnéticos (34) instalados a cada lado del vehículo (10) en posiciones lateralmente simétricas con respecto a una línea central de dirección hacia adelante recta del vehículo (10), para producir salidas que indican intensidad del campo magnético del alambre de limitación (38);
un sensor de velocidad angular (44) adaptado para producir una salida que indica velocidad angular alrededor de un eje vertical del vehículo (10), cuando el vehículo (10) gira, en el que un valor integrado en el tiempo de la salida del sensor de velocidad angular (44) indica un ángulo de giro alrededor del eje vertical; y un controlador (42) que controla la operación del vehículo (10);
caracterizado porque el controlador controla el vehículo (10) para moverlo hasta una posición prescrita, en la que un ángulo de la línea central en la dirección hacia adelante recta con relación a una dirección del alambre (38) tendido se convierte en un ángulo de referencia basado en las salidas de los sensores magnéticos (34), y para girarlo en un ángulo predeterminado, y calibra la salida del sensor de velocidad angular (44) por las salidas del sensor de velocidad angular (44) obtenidas durante el giro en el ángulo predeterminado basado en las salidas de los sensores magnéticos (34).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E15182462.
Solicitante: HONDA MOTOR CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: 1-1, Minami-Aoyama 2-chome Minato-ku, Tokyo 107-8556 JAPON.
Inventor/es: YAMAMURA,MAKOTO, NAKAYAMA,Keiichi, MATSUI,YUKI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01D5/20 FISICA. › G01 METROLOGIA; ENSAYOS. › G01D MEDIDAS NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; DISPOSICIONES PARA LA MEDIDA DE DOS O MAS VARIABLES NO CUBIERTAS POR OTRA UNICA SUBCLASE; APARATOS CONTADORES DE TARIFA; DISPOSICIONES PARA TRANSFERENCIA O TRANSDUCTORES NO ESPECIALMENTE ADAPTADAS A UNA VARIABLE PARTICULAR; MEDIDAS O ENSAYOS NO PREVISTOS EN OTRO LUGAR. › G01D 5/00 Medios mecánicos para la transferencia de la magnitud de salida de un elemento sensor; Medios para la conversión de la magnitud de salida de un elemento sensor en otra variable, en los que la forma o naturaleza del elemento sensor no determinan los medios de conversión; Transductores no especialmente adaptados a una variable específica (G01D 3/00 tiene prioridad; especialmente adaptados para aparatos que dan resultados distintos al valor instantáneo de una variable G01D 1/00). › mediante la variación de la inductancia, p. ej. mediante una armadura móvil.
- G01P21/00 G01 […] › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › Ensayo o calibrado de aparatos o de dispositivos comprendidos en los otros grupos de esta subclase.
- G05D1/02 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2629297_T3.pdf
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]