CIP-2021 : G01P 21/00 : Ensayo o calibrado de aparatos o de dispositivos comprendidos en los otros grupos de esta subclase.
CIP-2021 › G › G01 › G01P › G01P 21/00[m] › Ensayo o calibrado de aparatos o de dispositivos comprendidos en los otros grupos de esta subclase.
G01P 21/02 · de tacómetros.
CIP2021: Invenciones publicadas en esta sección.
Método y sistema para probar un medidor de turbina.
(01/07/2020) Un método para probar un medidor de turbina para uso en un conducto de gas natural, comprendiendo el método:
proporcionar un sistema de prueba , incluyendo el sistema de prueba un medidor de referencia ;
conectar el medidor de turbina al sistema de prueba para comunicación de fluido con él;
introducir un medio de ensayo en el sistema de prueba ;
circular el medio de ensayo a través del medidor de referencia y el medidor de turbina ,
medir el caudal de flujo del medio de ensayo a través del sistema de prueba utilizando cada uno del medidor de referencia y el medidor de turbina ; y
comparar el caudal de flujo medido por el medidor de referencia…
Procedimiento y dispositivo para determinar parámetros de medición inerciales.
(06/05/2020) Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al menos dos sensores inerciales detectan cada uno el mismo parámetro de medición a detectar en los intervalos de medición que se superponen al menos parcialmente entre sí de forma independiente con diferente precisión de detección,
caracterizado porque los parámetros de medición inerciales están previstos para controlar un misil, y un valor de salida (A) corregido (A) para controlar el misil se forma (S7) a partir de los valores de los parámetros de medición detectados (S1, S2) en función de la precisión de detección de al menos un sensor inercial , donde
- un desplazamiento (d1) de un primer sensor inercial y un desplazamiento…
Sensor de fuerza y método para probar su fiabilidad.
(22/01/2020) Un sensor de fuerza que comprende un objeto de medida, un transductor con un elemento de medida conectado de forma operativa al objeto de medida para generar señales de medida de una fuerza que actúa en el objeto de medida, y al menos dos canales de transmisión configurados para transmitir señales mutuamente correspondientes de dichas señales de medida independientemente entre sí, en donde cada canal comprende una línea de señal positiva y una línea de señal negativa, dichos canales de transmisión están conectados en paralelo al mismo transductor de tal manera que se pueden verificar las señales transmitidas en la salida de cada canal de transmisión, en donde dicho transductor comprende un electrodo positivo y negativo para recoger dicha señales de medida generadas por dicho…
DISPOSITIVO PARA CALIBRACIÓN DE ACELERÓMETROS TRIAXIALES.
(10/12/2019) 1. Dispositivo de acoplamiento y calibración de acelerómetros triaxiales configurados para establecer comunicación de datos con un dispositivo de procesamiento de datos en un procedimiento para calibrar dichos acelerómetros triaxiales , caracterizado porque comprende una carcasa que tiene al menos un tramo base , paredes laterales , paredes frontal y/o posterior y un tramo superior abierto , estando provista dicha carcasa de al menos un alojamiento con unas dimensiones tal que está configurado para recibir un acelerómetro triaxial .
2. Dispositivo según reivindicación 1 en el que la carcasa tiene la forma de un paralelepípedo rectangular que comprende un tramo base , paredes laterales , paredes frontal y posterior , y un tramo superior abierto .
3. Dispositivo según cualquiera de las reivindicaciones anteriores…
Procedimiento y sistema de armonización de un marco de referencia de un posicionador angular con respecto a un marco de referencia terrestre.
(06/11/2019) Procedimiento de armonización con respecto a un marco de referencia terrestre de un marco de referencia de un posicionador angular apto para recibir un móvil o un artefacto volante, embarcando dicho posicionador angular un dispositivo de medida de informaciones inerciales de dicho móvil o artefacto volante, siendo los ejes del posicionador angular y del dispositivo de medida de informaciones inerciales paralelos, o confundidos, o teniendo entre ellos una o varias distancias angulares conocidas, comprendiendo el procedimiento:
- una etapa de obtención (E20), a partir de informaciones inerciales medidas (E10) por el dispositivo de medida durante un primer período…
Procedimiento, sistema y programa informático para determinar la orientación de un aparato.
(11/09/2019) Un procedimiento para determinar la orientación, relativa a un vehículo, de un aparato fijado al vehículo, comprendiendo el procedimiento:
registrar periódicamente datos de aceleración del aparato a lo largo de tres ejes mutuamente ortogonales en un primer intervalo de tiempo;
registrar periódicamente datos de velocidad y rumbo del aparato en un segundo intervalo de tiempo;
determinar un primer vector que corresponde a la dirección de gravedad usando los datos de aceleración;
identificar uno o más períodos de aceleración en una línea sustancialmente recta utilizando los datos de velocidad y rumbo;
seleccionar datos de aceleración correspondientes al uno o más períodos…
Acelerómetro y procedimiento para la compensación de errores.
(07/08/2019) Un aparato que comprende:
transductores de aceleración vertical, lateral y longitudinal que producen señales no corregidas de aceleración y señales térmicas , incluyendo las señales térmicas una señal correspondiente a una temperatura del transductor de aceleración vertical, una señal correspondiente a una temperatura del transductor de aceleración lateral, y una señal correspondiente a una temperatura del transductor de aceleración longitudinal; y
un sistema de corrección de errores conectado con los transductores de aceleración para recibir las señales no corregidas de aceleración y las señales térmicas , incluyendo el sistema de corrección de errores,
(a) un controlador del…
Transductor piezoeléctrico con compensación de temperatura.
(17/07/2019) Un transductor piezoeléctrico para medir una fuerza que comprende
un elemento base; un elemento de precarga; al menos un medio de masa sísmica principal efectivo capaz de producir dicha fuerza cuando se acelera, estando dicho medio de masa sísmica principal efectivo unido por dicho elemento de precarga de manera directa o indirectamente contra dicho elemento base;
un elemento cerámico piezoeléctrico principal que comprende la primera cerámica piezoeléctrica, dicha primera cerámica piezoeléctrica es capaz de generar una carga eléctrica principal cuando se somete a dicha fuerza, estando dicho elemento cerámico piezoeléctrico principal unido mediante dicho elemento de precarga de manera directa o indirectamente…
Sistema y método para determinar la velocidad de un vehículo sobre la base de la velocidad GPS.
(27/06/2019) Método para determinar una velocidad de un vehículo sobre la base de una velocidad GPS capturada a partir de un Sistema de Posicionamiento Global, GPS, caracterizado por que, el método comprende:
capturar, por parte de un procesador , la velocidad GPS Vx, y un valor de precisión horizontal correspondientes a un sello de tiempo Tx;
modificar, por parte del procesador , la velocidad GPS Vx correspondiente al sello de tiempo Tx cuando la precisión horizontal correspondiente al sello de tiempo Tx es mayor que un valor predefinido; y
corregir, por parte del procesador , la velocidad GPS Vx correspondiente al sello de tiempo Tx, en donde la velocidad GPS se corrige
…
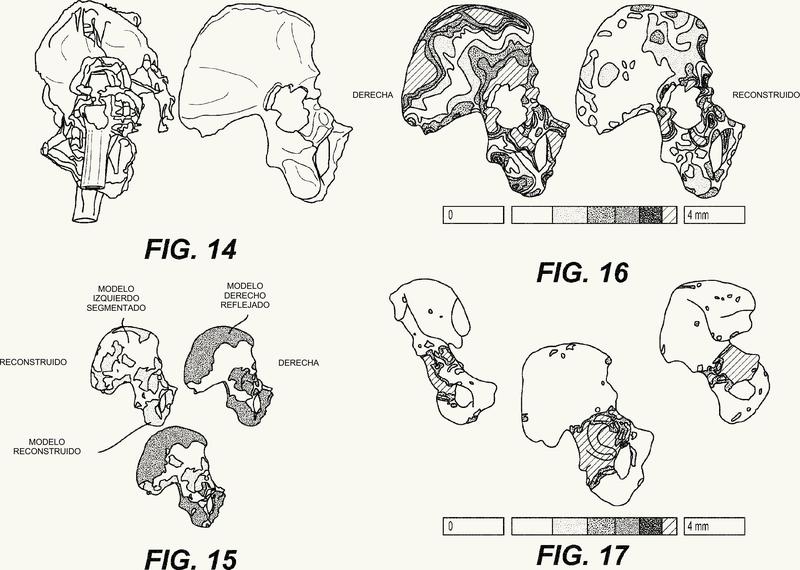
Implantes ortopédicos y de reconstrucción ósea.
(13/02/2019). Ver ilustración. Solicitante/s: Mahfouz, Mohamed R. Inventor/es: MAHFOUZ,MOHAMED R.
Un sistema de navegación quirúrgica que comprende:
una primera unidad de medición inercial (IMU);
un paquete de software que recibe datos de la primera IMU, el paquete de software incluye al menos uno de modelos precargados de diseño asistido por ordenador y modelos de superficies de diseño asistido por ordenador de una pluralidad de instrumentos quirúrgicos;
una segunda IMU que envía datos al paquete de software; y
un primer receptor de señales acoplado comunicativamente a las IMU primera y segunda, caracterizado porque la primera IMU incluye al menos tres giroscopios, al menos tres acelerómetros y al menos tres magnetómetros.
PDF original: ES-2718114_T3.pdf
Dispositivo de monitorización de cepillado dental.
(18/10/2018) Dispositivo de monitorización de cepillado dental para su uso con un cepillo dental durante el cepillado dental, dispositivo de monitorización que comprende:
un dispositivo de entrada para tomar entradas de usuario,
un sensor de aceleración para producir señales durante el cepillado dental,
un acondicionador de señales que recibe y procesa señales procedentes del sensor de aceleración, acondicionador de señales que, mientras se usa dicho cepillo dental y dispositivo de monitorización para cepillar una región dental (R-U, L-U, R-D, L-D) predeterminada o indicada por el usuario que comprende una pluralidad de superficies dentales predefinidas, identifica un ciclo de cepillado basándose en una aceleración…
Método de y sistema para el cálculo y la consolidación de parámetros de vuelo de una aeronave.
(11/10/2018) Método para el cálculo y la consolidación de una primera pluralidad de parámetros de vuelo de una aeronave que incluye una segunda pluralidad, igual a o mayor que dicha primera pluralidad, de sensores de presión (S1-SN) dispuestos en ubicaciones respectivas (i1-iN) en la aeronave, estando configurado cada sensor de presión para 5 proporcionar un valor de presión transducida (X1-XN) partiendo de la base de un valor de presión estática detectado respectivo, comprendiendo el método la etapa de adquirir dichos valores de presión transducida (X1-XN) de los sensores de presión, y caracterizándose por comprender además las etapas de:
…
SISTEMA MEDIDOR DE FRENÓMETROS DE RODILLOS Y PROCEDIMIENTO DE MEDIDA.
(18/12/2017). Solicitante/s: INSPECCION TECNICA DE VEHICULOS DE ASTURIAS S.A. Inventor/es: GUIMAREY ÁLVAREZ,Pablo, RODRÍGUEZ LÓPEZ,José Adriano, VILLAR ROCES,Javier.
Sistema medidor de frenómetros de rodillos formado por una estructura conformadora que incorpora al menos un dispositivo medidor que comprende un eje con soportes para la fijación al dispositivo medidor , una rueda neumática fijada al eje mediante un buje , un primer encoder para la medición de la velocidad angular del eje , un dispositivo de frenado, abrazando al eje , que incorpora un brazo , y una célula de carga , sólidamente unida al brazo . Estando la rueda neumática ubicada sobre unos rodillos de un frenómetro en funcionamiento, al activar el dispositivo de frenado, la célula de carga mide la fuerza de frenado producida.
PDF original: ES-2646953_A1.pdf
SISTEMA DE RASTREO DE OBJETOS ANIMADOS O INANIMADOS EN TIEMPO REAL CON AUTOREFERENCIACIÓN, AUTOCALIBRACIÓN Y SINCRONIZACIÓN ROBUSTA.
(28/09/2017). Solicitante/s: INSTITUTO TECNOLÓGICO METROPOLITANO. Inventor/es: BOTERO VALENCIA,Juan Sebastian.
La presente solicitud divulga un sistema de rastreo de objetos animados o inanimados en tiempo real, caracterizado porque comprende un sistema de adquisición de medidas inerciales y un sistema de calibración autónomo. La presente invención además incluye la calibración dinámica del sistema de adquisición de medidas inerciales con un sistema automático in-situ orientado al rastreo, mezcla de IMU's en sistemas no ortogonales para desarrollar un sistema auto referenciado. El sistema tiene aplicación en deportes acuáticos y donde sea necesaria la trasmisión de datos mecánicos, de objetos animados o inanimados, por lo que emplea sistemas robustos de transmisión y modelos de recopilación de datos que evitan la desincronización de la información y que incluyen un sistema de comunicación infrarrojo.
Sistema y procedimiento para monitorizar movimientos y vibraciones de estructuras en movimiento.
(13/07/2016) Sistema para monitorizar movimientos de una estructura fija con
- al menos un dispositivo de medición inercial fijado en la estructura para determinar velocidades de rotación y valores de aceleración en un sistema de referencia fijo en tierra,
- una unidad central para determinar un valor de monitorización basándose en las velocidades de rotación y en los valores de aceleración mediante un algoritmo de navegación inercial, y
- una unidad de emisión para emitir el valor de monitorización, estando configurada la unidad central para determinar y/o para corregir un fallo de medición del dispositivo de medición inercial basándose en una condición marco predeterminada por la estructura y para respaldar de esta manera el algoritmo de navegación, y
- estando configurada la unidad central para…
Aparato para controlar un vehículo utilitario que navega de forma autónoma.
(02/03/2016) Un aparato para controlar la operación de un vehículo utilitario que navega de forma autónoma adaptado para recorrer una zona de trabajo definida por un alambre de limitación tendido para realizar el trabajo de manera autónoma, que comprende:
una pareja de sensores magnéticos instalados a cada lado del vehículo en posiciones lateralmente simétricas con respecto a una línea central de dirección hacia adelante recta del vehículo , para producir salidas que indican intensidad del campo magnético del alambre de limitación ;
un sensor de velocidad angular adaptado para producir una salida que indica velocidad angular alrededor de un eje vertical del vehículo , cuando el vehículo gira, en el que un valor integrado en el tiempo de la…
Sistema y método para compensación de señales de sensores en vehículos.
(08/01/2014) Un sistema para compensación de señal de un sensor de vehículo, comprendiendo el sistema:
un primer sensor configurado para generar una primera señal de salida correspondiente a una aceleración deun vehículo;
un segundo sensor configurado para generar una segunda señal de salida correspondiente a una velocidad derueda del vehículo;
un módulo lógico difuso configurado para recibir la segunda señal de salida y para generar un primer conjuntode valores con base en al menos la segunda señal de salida y que representa una probabilidad de estabilidad de larueda; y
un módulo de filtro Kalman configurado para recibir el primer conjunto de valores y la primera señal de salida,caracterizado porque
el módulo de filtro Kalman está…
Sistema de calibrado de un sensor de movimiento dinámico y procedimiento para calibrar un sensor de movimiento dinámico.
(14/08/2013) Un sistema de calibrado del sensor de movimiento dinámico que comprende:
una mesa ; un sensor de movimiento dinámico en ensayo (SUT), teniendo dicho SUT un eje de sensibilidad orientado en paralelo a un eje del recorrido de dicha mesa ;
un excitador capaz de generar un largo recorrido a una baja frecuencia y de suficiente fuerza para mover dicho SUT sobre dicha mesa ;
una fuente que genera una señal impulsora suficiente para accionar el excitador , sobre al menos un intervalo de baja frecuencia;
un sensor de desplazamiento óptico sin contacto que tiene una rejilla , estando conectado dicho sensor de desplazamiento óptico a dicha mesa…
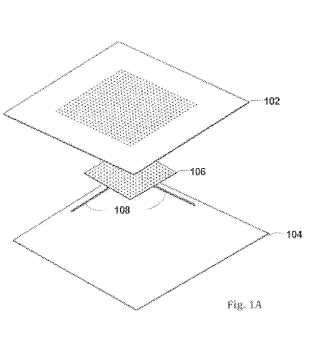
ACELERÓMETRO DE RESORTE ELECTROSTÁTICO INESTABLE.
(31/05/2012). Ver ilustración. Solicitante/s: BAOLAB MICROSYSTEMS SL. Inventor/es: FERNANDEZ MARTINEZ,DANIEL, MONTANYÀ Silvestre,Josep I.
Los sistemas y métodos que aquí se describen acometen las deficiencias de la técnica anterior al permitir la fabricación y el uso de acelerómetros, ya estén basados en MEMS, ya estén basados en NEMS, ya se basen en CMOS-MEMS, en el mismo dado o placa de circuito integrado que un chip de CMOS. En una realización, el acelerómetro se fabrica sobre el mismo dado o placa de circuito integrado que un chip de CMOS, utilizando un procedimiento de fabricación de CMOS típico.
Sistema de calibración de sensor de movimiento dinámico y procedimiento para calibrar un sensor de movimiento dinámico.
(30/03/2012) Un sistema de calibración de sensor de movimiento dinámico, que comprende:
un excitador eléctrico o electromecánico;
un sensor de desplazamiento óptico, en el que dicho sensor de desplazamiento óptico es un sensor de referencia;
una unidad de microprocesador ;
en el que dicha unidad de microprocesador genera una señal sinusoidal para que dicho excitador eléctrico o electromecánico genere el movimiento armónico de dicho excitador, en el que, el sensor de desplazamiento óptico comprende una escala , una rejilla graduada y un foto-detector , el sistema de calibración de sensor de movimiento dinámico comprende además al menos…
PROCEDIMIENTO Y DISPOSITIVO PARA CALIBRAR SENSORES DE ACELERACIÓN Y DE FUERZA.
(24/05/2011) Procedimiento para calibrar sensores de aceleración y de fuerza por medio de una barra de Hopkinson , en el que se encuentran en la barra de Hopkinson una sensórica de referencia configurada de la manera usual y, en el extremo de la barra de Hopkinson, el sensor que se debe calibrar, en el que se efectúa en el extremo de la barra 5 de Hopkinson situado enfrente del sensor una excitación por medio de un actor electromagnético para convertir una señal eléctrica en una fuerza mecánica, y en el que el actor electromecánico puede ser activado a través de una electrónica de control, caracterizado porque la electrónica de control sirve también como electrónica de regulación y la regulación de una forma de impulso de aceleración o de fuerza se efectúa por - medición de la respectiva magnitud por medio…
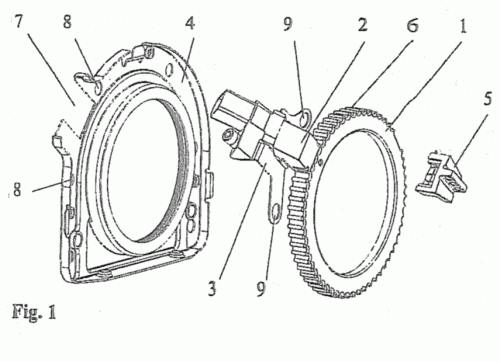
UNIDAD DE MONTAJE PARA SISTEMAS EMISORES.
(01/12/2006). Ver ilustración. Solicitante/s: AB SKF. Inventor/es: GORG,ALEXANDER, STEPHAN,BERND.
Una unidad de montaje para sistemas emisores con una rueda emisora prevista para su disposición sobre un árbol y un dispositivo sensor previsto para colocarse en una brida de sellado que sella al árbol. La unidad de montaje presenta una ayuda de calibrado desmontable con la que se fija el dispositivo sensor a la rueda emisora en una posición calculada en el marco de un precalibrado.
(16/06/2006). Solicitante/s: VIBRO-METER SA. Inventor/es: BROILLET, BERNARD.
El circuito de medición comprende una línea de transmisión simétrica (L) que conecta un transductor (T) co un amplificador de medición (S1) y un amplificador de defecto (S2). El transductor emite señales de entrada simétricas (E1, E2) a los amplificadores de medición y de defecto. El amplificador de medición (S1) emite una señal de medición (Eo) que representa la diferencia de las señales de entrada y el amplificador de defecto (S2) emite una señal de defecto (Ed) que representa la suma de las señales de entrada. La invención puede utilizarse para evaluar la calidad del circuito de medición durante el funcionamiento o la parada de la máquina vigilada gracias a la inyección de una señal auxiliar (Eg) en los terminales del transductor(T).
SISTEMA DE DIAGNOSTICO PARA UN SENSOR CAPACITIVO.
(01/11/1999). Solicitante/s: MAGNETI MARELLI S.P.A.. Inventor/es: SALERNO, FRANCO.
EL SISTEMA UTILIZA UN OSCILADOR (OSC) EL CUAL EN UNA FASE DE DIAGNOSTICO SE CONECTA ENTRE EL SENSOR (SENS) Y EL DETECTOR (RIV). LA FRECUENCIA DEL OSCILADOR (OSC) DEPENDE EN LA CAPACIDAD PRESENTE EN LA ENTRADA (IN), SI EL SENSOR (SENS) EN CONECTADO, LA FRECUENCIA CAE DENTRO DEL ANCHO DE BANDA DEL DETECTOR (RIV) Y POR LO TANTO EXISTE UNA SEÑAL DE SALIDA MAYOR QUE EL LIMITE DE DISCRIMINACION; SI EL SENSOR (SENS) ESTA SEPARADO, LA FRECUENCIA DEL OSCILADOR (OSC) SERA TAN ELEVADA COMO PARA SALIRSE DEL ANCHO DE BANDA DEL DETECTOR (RIV) Y POR LO TANTO HABRA UNA SEÑAL DE SALIDA (OUT) INFERIOR AL LIMITE DE DISCRIMINACION; EN EL CASO DE UN CIRCUITO SENSOR (SENS), EL OSCILADOR (OSC) ES BLOQUEADO, LO QUE TAMBIEN PERMITE UNA DISCRIMINACION DE ESTA CONDICION.
METODO PARA CALIBRAR UN DETECTOR DE IMPACTO DE PUNTO UNICO.
(16/12/1998). Solicitante/s: FORD MOTOR COMPANY. Inventor/es: SPANGLER, LELAND, JOSEPH.
UN METODO PARA CALIBRAR UN DETECTOR DE IMPACTO PERMITE REALIZAR LA CALIBRACION DESPUES DE QUE LA FABRICACION DEL DETECTOR SEA COMPLETADA. DURANTE LA CALIBRACION, EL DETECTOR SUFRE UNA ACELERACION MIENTRAS QUE LOS VALORES DE CALIBRACION ESPECIFICA DEL VEHICULO ESTAN PROGRAMADOS DENTRO DE LA MEMORIA DEL DETECTOR PARA DIFERENTES PROPORCIONES INCREMENTALES DE ACELERACION. SE COMPRUEBA LA VERIFICACION DE LA CALIBRACION PARA VERIFICAR QUE LA CORRELACION ENTRE ACELERACION Y SALIDA DEL DETECTOR ES LINEAL. LA CALIBRACION TAMBIEN INCLUYE UNA PRUEBA DE HISTERESIS COMPARANDO VALORES DE SALIDA CUANDO SE AUMENTA INCREMENTALMENTE LA ACELERACION A VALORES DE ACELERACION CORRESPONDIENTES MIENTRAS QUE SE REDUCE INCREMENTALMENTE LA ACELERACION. EL METODO DE CALIBRACION PUEDE TAMBIEN INCLUIR CALCULAR UN TIEMPO DE RESPUESTA PARA UN CIRCUITO DE AUTO COMPROBACION QUE PUEDE SER ALMACENADO EN MEMORIA Y MAS TARDE USADO DURANTE AUTO COMPROBACIONES DEL DETECTOR.
SISTEMA DE DETECCION DE IMPACTO.
(01/08/1998) UN METODO Y UN APARATO PARA DETECTAR LAS FALLAS DE UN SISTEMA DETECTOR DE IMPACTOS DE PUNTO UNICO QUE TIENE UNAS PLACAS DE AUTOVERIFICACION ELECTRICAMENTE CONDUCTORAS COLOCADAS DENTRO DEL DETECTOR PARA DESVIAR ELECTROSTATICAMENTE EL ELEMENTO DETECTOR DURANTE LA SECUENCIA DE AUTOVERIFICACION. LA DESVIACION DEL ELEMENTO DETECTOR ES IDENTICA A LA DESVIACION QUE TENDRIA LUGAR DURANTE UN CASO DE IMPACTO DIGNO DE UNA ACTIVACION REAL. EL TIEMPO DE RESPUESTA DESDE LA DESVIACION DEL ELEMENTO DETECTOR HASTA EL CAMBIO DE ESTADO DE UN INDICADOR DE ACTIVACION SE REGISTRA Y COMPARA CON UN TIEMPO DE RESPUESTA PREESTABLECIDO QUE HAY ALMACENADO EN UNA MEMORIA NO VOLATIL. LAS DIFERENCIAS ENTRE EL TIEMPO…
SENSOR DE IMPACTO PARA SISTEMA DE RESTRICCION, DE SEGURIDAD PARA VEHICULOS.
(01/04/1997). Solicitante/s: MEISTER, JACK B. Inventor/es: MEISTER, JACK B.
SE PRESENTA UN SISTEMA DE RESTRICCION PARA VEHICULOS QUE INCLUYE UN SENSOR DE IMPACTO ACOPLADO MEDIANTE FIBRAS OPTICAS A UN DISPARADOR PARA INFLAR UN AIR BAG . EL SENSOR DE IMPACTO INCLUYE UN IMAN PERMANENTE DISPUESTO DENTRO DE UNA CAVIDAD Y COMPRIMIDO MEDIANTE LA FUERZA MAGNETICA CONTRA UN EXTREMO DE LA CAVIDAD, EL MOVIMIENTO DEL IMAN EN LA CAVIDAD ES MEDIDO POR UN CABLE "WEIGAND" O UN SENSOR HALL PARA DISPARAR EL AIR BAG. UN UTENSILIO SE DISPONE DE FORMA EXTERNA A LA CAVIDAD PARA AJUSTAR SELECTIVAMENTE LA COMPRESION DEL SENSOR Y/O PARA MOVER EL IMAN EN PROXIMIDAD CON EL SENSOR DEL CABLE O DE EFECTO HALL PARA COMPROBAR LA CONDICION OPERATIVA DEL SENSOR.
ACELEROMETRO COMPENSADOR DE TEMPERATURA.
(01/11/1993) UN SENSOR DE ACELERACION COMPRENDE UN TUBO FORMADO DE UN MATERIAL NO MAGNETICO CONDUCTOR ELECTRICAMENTE; UNA PARADA QUE DEFINE UN EXTREMO DEL TUBO QUE SE MUEVE LONGITUDINALMENTE DE ELLO EN RESPUESTA A LA TEMPERATURA; UN ELEMENTO PERMEABLE MAGNETICAMENTE, TAL COMO UNA ARANDELA DE HIERRO, PROXIMA CON EL EXTREMO DEL TUBO; Y UNA MASA SENSORA EN EL TUBO QUE COMPRENDE UN PAR DE IMANES PERMANENTES ASEGURADOS A LOS LADOS OPUESTOS DE UN ESPACIADOR DE HIERRO PARA COLOCAR UN PAR DE POLOS MAGNETICOS DE ELLO EN OPOSICION. EN LA OPERACION, LA MASA SENSORA INTERACTUA CON LA ARANDELA DE HIERRO PARA ESTAR MAGNETICAMENTE ENLAZADO CONTRA LA PARADA, MIENTRAS LA PARADA SE MUEVE LONGITUDINALMENTE DEL…
PROCEDIMIENTO PARA MEJORAR LA ADAPTACION AL CAMINO RECORRIDO DE TAXIMETROS ELECTRONICOS.
(16/03/1984). Solicitante/s: KIENZLE APPARATE GMBH.
PROCEDIMIENTO PARA MEJORAR LA ADAPTACION DE TAXIMETROS ELECTRONICOS AL CAMINO RECORRIDO.SE CARACTERIZA PORQUE NO ESTANDO COLOCADO EL PRECINTADO DEL APARATO, UN INTERRUPTOR ADOPTA UNA POSICION TAL QUE EL APARATO PUEDE SER CONMUTADO A UN ESTADO DE EXPERIMENTACION. MEDIANTE UNA PRIMERA TECLA EL EMISOR DE IMPULSOS RELACIONADOS CON EL CAMINO PUEDE SER UNIDO CON UN REGISTRO DE MANERA QUE LE ALIMENTEN IMPULSOS CORRESPONDIENTES AL CAMINO RECORRIDO. MEDIANTE ACCIONAMIENTO DE UNA SEGUNDA TECLA SE PUEDE DESCONECTAR EL EMISOR DE IMPULSOS, RETIRANDOSE DE LA MEMORIASIMULTANEAMENTE EL VALOR DE IMPULSOS ACUMULADO. AL COLOCAR EL PRECINTADO DEL APARATO SE SUPRIME EL ESTADO DE EXPERIMENTACION Y SE PUEDE CONECTAR DE NUEVO EL ESTADO DE FUNCIONAMIENTO.
{kind=link}
{kind=link}
{kind=link}