Sistema de control y vehículo de tipo de montar a horcajadas en sillín que incluye el mismo.
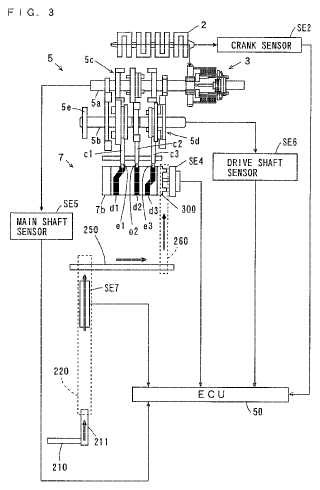
Sistema de control que controla la salida de un motor (107), para un vehículo que transmite el giro de un cigüeñal (2) en un motor (107) a una rueda (115) motriz a través de un embrague (3) y una transmisión (5) que comprende un mecanismo (7) de reducción de velocidad que está adaptado para transmitir el giro del cigüeñal (2) a un árbol (5a,
5b) giratorio a una relación de engranajes de reducción predeterminada, comprendiendo el sistema de control:
un primer detector (SE2) de velocidad de giro que está adaptado para detectar la velocidad de giro del cigüeñal (2) en el motor (107);
un segundo detector (SE5, SE6) de velocidad de giro que está adaptado para detectar la velocidad de giro del árbol (5a, 5b) giratorio en la transmisión (5);
un regulador que está adaptado para regular la salida del motor (107); y
un controlador (50) que está adaptado para determinar un estado acoplado y un estado desacoplado del embrague (3), y para evitar que la salida del motor (107) se regule por el regulador cuando se determina que el embrague (3) está en el estado desacoplado,
caracterizado porque el controlador (50) está adaptado para estimar la velocidad de giro del cigüeñal (2) basándose en la velocidad de giro del árbol (5a, 5b) giratorio detectada por el segundo detector (SE5, SE6) de velocidad de giro y la relación de engranajes de reducción, y para determinar que el embrague (3) se cambia del estado acoplado al estado desacoplado cuando un estado en el que un valor de diferencia entre el valor estimado (SC) y la velocidad de giro (SR) del cigüeñal (2) detectada por el primer detector (SE2) de velocidad de giro es mayor que un límite superior predeterminado o es menor que un límite inferior predeterminado se continúa durante un primer periodo (U1) previamente fijado, o alternativamente
el controlador (50) está adaptado para estimar la velocidad de giro del árbol (5a, 5b) giratorio basándose en la velocidad de giro del cigüeñal (2) detectada por el primer detector (SE2) de velocidad de giro y la relación de engranajes de reducción, y para determinar que el embrague (3) se cambia del estado acoplado al estado desacoplado cuando un estado en el que un valor de diferencia entre el valor estimado y la velocidad de giro del árbol (5a, 5b) giratorio detectada por el segundo detector (SE5, SE6) de velocidad de giro es mayor que el límite superior predeterminado o es menor que el límite inferior predeterminado se continúa durante el primer periodo (U1) previamente fijado.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09179404.
Solicitante: YAMAHA HATSUDOKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 2500 SHINGAI, SHIZUOKA-KEN IWATA-SHI, SHIZUOKA 438-8501 JAPON.
Inventor/es: SAKAI, KOUJI, MIZUTANI, TAKAAKI, MIURA,ATSUSHI, WATANABE,HIROTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W10/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de los acoplamientos de la cadena cinemática.
- B60W10/06 B60W 10/00 […] › incluyendo el control de motores de combustión.
- B60W10/11 B60W 10/00 […] › Engranajes escalonados .
- B60W30/19 B60W […] › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Mejora del cambio de marcha, p. ej. por sincronización o suavizado del desplazamiento del engranaje.
PDF original: ES-2400150_T3.pdf
Fragmento de la descripción:
Sistema de control y vehículo de tipo de montar a horcajadas en sillín que incluye el mismo
ANTECEDENTES DE LA INVENCIÓN
Campo de la invención La presente invención se refiere a un sistema de control que lleva a cabo el control de salida de un motor basándose en una operación de cambio de marcha por un conductor y a un vehículo de tipo de montar a horcajadas en sillín que incluye el mismo.
Descripción de la técnica anterior
Cuando se accionan cambios de marcha en vehículos con transmisiones manuales, en primer lugar, los conductores desacoplan habitualmente los embragues. Por tanto, se detiene la transmisión de potencia desde cigüeñales en motores hasta árboles principales en las transmisiones, de modo que pueden desconectarse fácilmente los engranajes. En este estado, los conductores realizan operaciones de cambio de marcha y cambian las posiciones de engranajes. Finalmente, los conductores acoplan los embragues, para transmitir la potencia desde los cigüeñales hasta los árboles principales. Esto da como resultado que se completan los cambios de marcha.
Es necesario que los cambios de marcha se accionen rápidamente en carreras u otros. Por tanto, los conductores pueden accionar los cambios de marcha sin realizar operaciones de embrague (denominado a continuación en el presente documento “cambio sin embrague”) . En este caso, los cambios de marcha se accionan con la potencia transmitida desde los cigüeñales hasta los árboles principales. Por tanto, los engranajes son difíciles de desconectar. Por tanto, los conductores deben regular las salidas de los motores de tal manera que los engranajes puedan desconectarse fácilmente.
Las regulaciones de las salidas de los motores son difíciles de manejar para conductores menos experimentados. Por tanto, si los conductores menos experimentados realizan el cambio sin embrague, los cambios de marcha pueden no realizarse suavemente.
Convencionalmente, se ha desarrollado un dispositivo que controla la salida de un motor en cambio sin embrague (véase el documento JP 6-146941 A, por ejemplo) .
En el dispositivo de control de la salida del motor comentado en el documento JP 6-146941 A, cuando un conductor realiza una operación de cambio de marcha, se retrasa el tiempo de encendido para el motor por un dispositivo de control del encendido. Esto provoca que se reduzca una fuerza motriz ejercida entre un engranaje en el lado del árbol de salida de una transmisión y un engranaje en el lado del árbol de entrada de la misma. Como resultado, el conductor puede realizar una operación de cambio de marcha suave.
En el dispositivo de control de la salida del motor mencionado anteriormente, se proporciona una palanca de desembrague con un conmutador de límite. Esto provoca que el conmutador de límite funcione cuando el conductor acciona la palanca de desembrague, para inhibir el control del tiempo de encendido por el dispositivo de control del encendido. Esto impide que la salida del motor se controle con el embrague desacoplado.
A pesar de proporcionar el conmutador de límite todavía puede reducirse la sensación de desplazamiento del conductor.
El documento EP 1 935 738 A1, que da a conocer las características del preámbulo de la reivindicación 1, describe una motocicleta que incluye un motor, una CPU, una palanca de desembrague y un conmutador de cambio. Cuando un conductor realiza una operación de cambio de marcha, la CPU regula la salida del motor. Cuando la CPU regula la salida del motor, se inhibe la operación de giro de la palanca de desembrague por el conmutador de cambio. El mecanismo de inhibición también puede evitar que la salida del motor se regule por el regulador de salida del motor cuando el conductor desconecta el embrague.
El documento EP 0 922 604 A2 describe un cambio mediante sistema de transmisión de vehículo por cables que incluye métodos de control que son especialmente útiles para controlar la transmisión en condiciones de inicio desde parada. Dado que el embrague maestro debe accionarse manualmente en tales condiciones, la invención incluye un método de determinación de si el embrague está abierto o cerrado. Se compara la velocidad de giro del árbol de salida del motor con la velocidad de giro del árbol de entrada de la transmisión y si la diferencia entre esas velocidades es mayor que un valor preseleccionado, se determina que el embrague está abierto.
SUMARIO DE LA INVENCIÓN
Un objeto de la invención es proporcionar un sistema de control que permite una operación de cambio de marcha suave sin reducir la sensación de desplazamiento y un vehículo de tipo de montar a horcajadas en sillín que incluye el mismo.
Este objeto se logra mediante un sistema de control según la reivindicación 1, y mediante un vehículo de tipo de montar a horcajadas en sillín según la reivindicación 5.
Según una realización preferida de la presente invención, un sistema de control que controla, en un vehículo que transmite el giro de un cigüeñal en un motor a una rueda motriz a través de un embrague y una transmisión, la salida del motor incluye un primer detector de velocidad de giro que detecta la velocidad de giro del cigüeñal en el motor como una primera velocidad de giro, un segundo detector de velocidad de giro que detecta la velocidad de giro del árbol giratorio en la transmisión como una segunda velocidad de giro, un regulador que regula la salida del motor, y un controlador que determina un estado acoplado y un estado desacoplado del embrague basándose en la primera velocidad de giro y la segunda velocidad de giro, y evita que la salida del motor se regule por el regulador cuando se determina que el embrague está en el estado desacoplado.
En el sistema de control, el primer detector de velocidad de giro detecta la velocidad de giro del cigüeñal como la primera velocidad de giro. El segundo detector de velocidad de giro detecta la velocidad de giro del árbol giratorio en la transmisión como la segunda velocidad de giro.
El estado del embrague se determina basándose en la primera velocidad de giro del cigüeñal y la segunda velocidad de giro del árbol giratorio, que se han detectado.
Cuando el embrague está en el estado acoplado, el giro del cigüeñal en el motor se transmite a la rueda motriz a través del árbol giratorio en la transmisión. El regulador regula la salida del motor en este estado de modo que un conductor puede realizar una operación de cambio de marcha suave.
En la presente invención, la regulación de la salida del motor significa que se aumenta o se disminuye la salida del motor en una cantidad predeterminada desde una salida correspondiente a una apertura del acelerador. La cantidad predeterminada se fija de tal manera que se reduce una fuerza de acoplamiento entre una garra y una garganta que están formadas en engranajes de la transmisión. Esto permite un estado en el que los engranajes de la transmisión se acoplan entre sí para cambiarse suavemente.
Por otro lado, cuando el embrague está en el estado desacoplado, el giro del cigüeñal en el motor no se transmite a la rueda motriz. En este estado, se evita que la salida del motor se regule por el regulador. Esto impide que se produzca una sacudida de cambio cuando se cambia el embrague del estado desacoplado al estado acoplado. Esto impide la reducción de la sensación de desplazamiento del conductor.
La transmisión incluye además un mecanismo de reducción de velocidad que transmite el giro del cigüeñal al árbol giratorio a una relación de engranajes de reducción predeterminada, y el controlador calcula, basándose en una de la primera velocidad de giro y la segunda velocidad de giro y la relación de engranajes de reducción, un valor estimado de la otra velocidad de giro, y determina el estado acoplado y el estado desacoplado del embrague basándose en un valor de diferencia entre la otra velocidad de giro y el valor estimado.
Cuando el embrague está en el estado acoplado, el mecanismo de reducción de velocidad transmite el giro del cigüeñal en el motor al árbol giratorio en la transmisión a la relación de engranajes de reducción predeterminada. Por tanto, basándose en una de la primera y la segunda velocidad de giro y la relación de engranajes de reducción en el mecanismo de reducción de velocidad, se calcula el valor estimado de la otra relación de engranajes de reducción. El estado acoplado y el estado desacoplado del embrague se determinan basándose en el valor de diferencia entre la primera o la segunda velocidad de giro y el valor estimado. Esto permite determinar de manera fácil y precisa el estado acoplado y el estado desacoplado del embrague.
El controlador determina que el... [Seguir leyendo]
Reivindicaciones:
1. Sistema de control que controla la salida de un motor (107) , para un vehículo que transmite el giro de un cigüeñal (2) en un motor (107) a una rueda (115) motriz a través de un embrague (3) y una transmisión (5) que comprende un mecanismo (7) de reducción de velocidad que está adaptado para transmitir el giro del cigüeñal (2) a un árbol (5a, 5b) giratorio a una relación de engranajes de reducción predeterminada, comprendiendo el sistema de control:
un primer detector (SE2) de velocidad de giro que está adaptado para detectar la velocidad de giro del cigüeñal (2) en el motor (107) ;
un segundo detector (SE5, SE6) de velocidad de giro que está adaptado para detectar la velocidad de giro del árbol (5a, 5b) giratorio en la transmisión (5) ;
un regulador que está adaptado para regular la salida del motor (107) ; y
un controlador (50) que está adaptado para determinar un estado acoplado y un estado desacoplado del embrague (3) , y para evitar que la salida del motor (107) se regule por el regulador cuando se determina que el embrague (3) está en el estado desacoplado,
caracterizado porque el controlador (50) está adaptado para estimar la velocidad de giro del cigüeñal (2) basándose en la velocidad de giro del árbol (5a, 5b) giratorio detectada por el segundo detector (SE5, SE6) de velocidad de giro y la relación de engranajes de reducción, y para determinar que el embrague (3) se cambia del estado acoplado al estado desacoplado cuando un estado en el que un valor de diferencia entre el valor estimado (SC) y la velocidad de giro (SR) del cigüeñal (2) detectada por el primer detector (SE2) de velocidad de giro es mayor que un límite superior predeterminado o es menor que un límite inferior predeterminado se continúa durante un primer periodo (U1) previamente fijado, o alternativamente el controlador (50) está adaptado para estimar la velocidad de giro del árbol (5a, 5b) giratorio basándose en la velocidad de giro del cigüeñal (2) detectada por el primer detector (SE2) de velocidad de giro y la relación de engranajes de reducción, y para determinar que el embrague (3) se cambia del estado acoplado al estado desacoplado cuando un estado en el que un valor de diferencia entre el valor estimado y la velocidad de giro del árbol (5a, 5b) giratorio detectada por el segundo detector (SE5, SE6) de velocidad de giro es mayor que el límite superior predeterminado o es menor que el límite inferior predeterminado se continúa durante el primer periodo (U1) previamente fijado.
2. Sistema de control según la reivindicación 1, en el que el controlador (50) está adaptado para determinar que el embrague (3) se cambia del estado desacoplado al estado acoplado cuando el estado en el que el valor de diferencia es el límite superior o menos y es el límite inferior o más se continúa durante un segundo periodo (U2) previamente fijado.
3. Sistema de control según la reivindicación 2, en el que el embrague (3) comprende un mecanismo limitador de par motor inverso que está adaptado para funcionar de tal manera que se produce una diferencia entre la velocidad de giro del cigüeñal (2) y la velocidad de giro del árbol (5a, 5b) giratorio en la transmisión (5) cuando un par motor relativo generado entre el cigüeñal (2) y el árbol (5a, 5b) giratorio en la transmisión (5) supera un valor previamente fijado, y el primer periodo (U1) se fija más largo que el segundo periodo (U2) .
4. Sistema de control según una cualquiera de las reivindicaciones 1 a 3, en el que un valor absoluto del límite superior es igual a un valor absoluto del límite inferior.
5. Vehículo de tipo de montar a horcajadas en sillín, que comprende:
una rueda (115) motriz;
un motor (107) que incluye un cigüeñal (2) ;
una transmisión (5) que incluye un árbol (5a, 5b) giratorio, y está adaptada para transmitir el giro del cigüeñal (2) en el motor (107) a la rueda (115) motriz a una pluralidad de relaciones de engranajes de reducción dependiendo de diferentes estados de acoplamiento de una pluralidad de engranajes proporcionados en el árbol (5a, 5b) giratorio;
un embrague (3) proporcionado entre el cigüeñal (2) en el motor (107) y el árbol (5a, 5b) giratorio en la transmisión (5) ;y
el sistema de control según una cualquiera de las reivindicaciones 1 a 4.
Patentes similares o relacionadas:
Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, del 29 de Abril de 2020, de IVECO S.P.A.: Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, comprendiendo la línea motriz: - una caja de engranajes (GR) que […]
Vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática, del 8 de Abril de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un operador de acelerador […]
 Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
CONJUNTO PARA LIMITACION DE VELOCIDAD DE FORMA AUTOMÁTICA EN VEHÍCULOS, del 20 de Noviembre de 2019, de MARTINEZ BONET, Francisco Jose: 1. Conjunto para limitación de velocidad de forma automática en vehículos caracterizado porque comprende un asistente de velocidad encargado […]
Máquina de trabajo autopropulsada así como procedimiento para frenar una máquina de trabajo de este tipo, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular vehículo oruga tal como una niveladora, con un accionamiento eléctrico que comprende al menos un motor […]
Máquina de trabajo autopropulsada, así como procedimiento para frenar una máquina de trabajo de esa clase, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular un camión volquete o camión, con un accionamiento eléctrico que comprende al menos un motor […]
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de transmisión automática y vehículo del tipo de montar a horcajadas equipado con el aparato, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un embrague incluyendo un rotador de lado […]