CIP-2021 : A61B 34/30 : Robots quirúrgicos.
CIP-2021 › A › A61 › A61B › A61B 34/00 › A61B 34/30[1] › Robots quirúrgicos.
Notas[t] desde A61 hasta A63: SALUD; SALVAMENTO; DIVERSIONES
A NECESIDADES CORRIENTES DE LA VIDA.
A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE.
A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48).
A61B 34/00 Cirugía asistida por ordenador; Operadores o robots adaptados de forma especial para su uso en cirugía.
A61B 34/30 · Robots quirúrgicos.
CIP2021: Invenciones publicadas en esta sección.
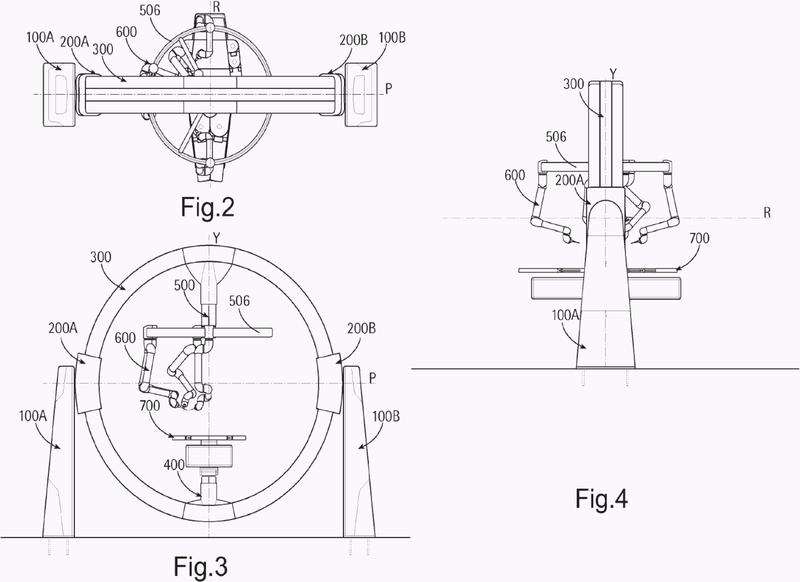
Brazos robóticos quirúrgicos con mesa de operaciones.
(03/10/2018). Ver ilustración. Solicitante/s: The Board of Trustees of the University of Illionis. Inventor/es: GIULIANOTTI,PIER, VITTORI,ARTURO, VOGLER,ANDREAS.
Una estación de cirugía robótica, que comprende:
i) una base , configurada para su fijación al suelo;
ii) una estructura en forma de anillo, que retiene una camilla de pacientes y una pluralidad de brazos robóticos en unas respectivas primero y segunda monturas ; y
iii) una unidad de control remoto que un/a cirujano/a puede utilizar para llevar a cabo una intervención quirúrgica en un/a paciente,
caracterizado por que la estructura en forma de anillo es giratoria con respecto a la base alrededor de un eje (R) de balanceo, configurado para ser paralelo al suelo y que pasa a través del centro de la estructura en forma de anillo, pudiendo de este modo moverse los brazos robóticos en sincronización mecánica con la camilla de pacientes,
y donde dicha primera y segunda monturas de la estructura en forma de anillo están dispuestas opuestas entre sí, a lo largo de un diámetro de la misma.
PDF original: ES-2684601_T3.pdf
Sistemas y métodos para activar selectivamente zonas de guía háptica.
(23/05/2018). Solicitante/s: MAKO SURGICAL CORP. Inventor/es: GRANCHI,CARINNE CECILE, IORGULESCU,RADU, MOSES,DENNIS, WOJCIK,JASON ROBERT.
Un método para activar una geometría háptica virtual basada en una posición de una parte de un instrumento relativa a una característica objetivo, que comprende:
detectar la posición de un punto de referencia (103a) de un instrumento con respecto a una pluralidad de características objetivo (402a, 402b, 402c), en el que cada una de la pluralidad de características objetivo corresponde a una geometría háptica virtual respectiva (400a, 400b, 400c) entre una pluralidad de geometrías hápticas inactivas (400a, 400b, 400c);
determinar cuál de la pluralidad de características objetivo está más cerca y dentro de una distancia umbral del punto de referencia del instrumento, para seleccionar una geometría háptica virtual correspondiente a la característica objetivo más cercana; y
activar la geometría háptica virtual correspondiente a la característica objetivo más cercana.
PDF original: ES-2674732_T3.pdf
Mecanismo de dirección de transmisión de par para una herramienta direccionable.
(16/05/2018) Una herramienta direccionable que tiene un extremo proximal y un extremo distal y que comprende una zona de eje , una parte proximal torsionable, BPP , que se puede mover omnidireccionalmente, y una parte distal torsionable, BDP , que se puede mover omnidireccionalmente y se configura para moverse en respuesta al movimiento de la BPP , herramienta direccionable que comprende un sistema de transmisión mecánica, MTS, que comprende una pluralidad de miembros longitudinales, LM , teniendo cada uno un extremo proximal y un extremo distal , dispuestos en una dirección longitudinal alrededor de un tubo ficticio…
Aparato de cirugía asistida por ordenador y procedimiento de corte de tejido.
(18/04/2018) Aparato de cirugía asistida por ordenador , que comprende
un instrumento quirúrgico que presenta un elemento de intervención para cortar tejido de una parte de cuerpo de un paciente;
una unidad de control dispuesta para controlar una posición y orientación del elemento de intervención del instrumento quirúrgico en relación con la parte de cuerpo del paciente con respecto a una línea osteotómica predefinida sobre la parte de cuerpo del paciente; y
un dispositivo de seguimiento dispuesto para realizar un seguimiento de una posición y orientación de la parte de cuerpo del paciente,
caracterizado por que
el instrumento quirúrgico comprende un sistema de monitorización óptico que está montado de manera fija en relación con el elemento de intervención del instrumento quirúrgico , en el que el sistema…
Instrumentos quirúrgicos articulados y métodos para desplegar los mismos.
(11/04/2018). Solicitante/s: Medrobotics Corporation. Inventor/es: FLAHERTY, J., CHRISTOPHER, OYOLA,ARNOLD, CASTRO,MICHAEL SALVATORE.
Una herramienta quirúrgica que comprende:
un primer conjunto alargado que comprende una región de articulación ; y
un segundo conjunto alargado que comprende:
un elemento de soporte alargado ;
un elemento de activación alargado móvil con respecto al elemento de soporte; y
un mecanismo funcional acoplado al elemento de activación, siendo un movimiento del mecanismo funcional en respuesta a un movimiento del elemento de activación, donde una fuerza impartida por el movimiento del elemento de activación se aísla del primer conjunto por el elemento de soporte, caracterizado por que el segundo conjunto comprende, además, una horquilla acoplada al elemento de soporte y donde la herramienta quirúrgica comprende, además, una holgura longitudinal entre la horquilla y un extremo distal del primer conjunto, donde el segundo conjunto está en comunicación con el primer conjunto de manera que el elemento de soporte pueda moverse con respecto al primer conjunto.
PDF original: ES-2668307_T3.pdf
Transmisión con primer y segundo elemento de transmisión.
(21/02/2018) Sistema de transmisión para un brazo robótico , que comprende: un primer componente que presenta un miembro de accionamiento y un miembro accionado ; 5 un segundo componente fijado a una placa de base ; y primer y segundo elemento de transmisión acoplados al miembro de accionamiento y el segundo componente y configurados para provocar el movimiento del primer componente en relación con el segundo componente en respuesta a una fuerza del primer y segundo elemento de transmisión mediante el miembro de accionamiento ,
donde el primer componente comprende una parte (148a) configurada para inhibir el movimiento del miembro de accionamiento cuando la parte…
Transmisión con mecanismo de conexión para variar fuerza de tensión.
(21/02/2018) Sistema de transmisión , que comprende:
un miembro de accionamiento ;
un miembro accionado que presenta un mecanismo de conexión ; y
al menos una transmisión parcialmente flexible acoplada al miembro de accionamiento y el mecanismo de conexión del miembro accionado y configurada para provocar el movimiento del miembro accionado en respuesta al movimiento del miembro de accionamiento, donde la transmisión flexible comprende una pluralidad de elementos de tensión ,
donde el mecanismo de conexión está configurado para ajustarse con el fin de variar una fuerza de tensión aplicada a la transmisión flexible , y caracterizado por que el mecanismo de conexión incluye una pluralidad de miembros de acoplamiento , estando…
SISTEMA ROBÓTICO QUIRÚRGICO Y MÉTODO PARA MANEJAR UN SISTEMA ROBÓTICO QUIRÚRGICO.
(28/12/2017) Un sistema robótico quirúrgico que comprende: unidades robóticas, cada una de las cuales es independiente de las demás y comprende un soporte y un conjunto de brazo robótico ; dicho soporte comprende medios de movimiento y está configurado para cambiar la posición y la orientación del soporte con respecto a la mesa ; dicho conjunto de brazo robótico comprende: un brazo robótico , una herramienta quirúrgica acoplada a este y un sensor de fuerza configurado para recibir la medición de las fuerzas y de los pares aplicados por la herramienta . El sistema comprende también una consola de control configurada para manejar a distancia dichas unidades robóticas, que comprende: un medio de computación ; dispositivos…
Métodos y sistemas para modificar un parámetro de un procedimiento automatizado.
(06/12/2017). Solicitante/s: Restoration Robotics, Inc. Inventor/es: ZHANG,HUI, BODDULURI,Mohan, CANALES,MIGUEL G, ZINGARETTI,GABRIELE, TIPPETT,BRIAN E.
Un método para modificar un parámetro de operación de un sistema para el uso en un procedimiento de trasplante de cabello automatizado o semiautomatizado, el método comprende:
proporcionar una imagen en tiempo real de una superficie del cuerpo donde se usa un sistema que comprende una herramienta para ejecutar un procedimiento de trasplante de cabello automatizado o semiautomatizado;
proporcionar al menos una instantánea histórica de la superficie del cuerpo ; la al menos una instantánea histórica identifica un parámetro asociado con el trasplante de cabello;
determinar si un valor del parámetro identificado asociado con el trasplante de cabello está fuera de uno o más límites aceptables o convenientes; y
modificar automáticamente por el sistema al menos un parámetro de operación de la herramienta si el valor del parámetro identificado asociado con el trasplante de cabello está fuera de uno o más límites aceptables o convenientes.
PDF original: ES-2656954_T3.pdf
Dispositivo de sonda articulado extensible.
(06/12/2017) Un dispositivo de sonda articulado que comprende:
un primer mecanismo que comprende:
un primer miembro de articulación posicionado en una zona proximal del primer mecanismo , una pluralidad de miembros de articulación intermedios , en donde uno primero de los miembros de articulación intermedios está acoplado de manera movible al primer miembro de articulación , un segundo miembro de articulación posicionado en una zona distal del primer mecanismo el cual está acoplado de manera movible a uno segundo de los miembros de articulación intermedios , y
un orificio pasante posicionado excéntricamente a través del cual está dispuesto un cable de actuación, en el que un primer extremo del cable de actuación está configurado para ser terminado sobre un componente de actuación…
Sistema para identificar un punto de referencia.
(08/11/2017). Solicitante/s: SMITH & NEPHEW, INC.. Inventor/es: GRUSIN,Nathaniel K, AUSTIN,GENE EDWARD, RAINS,JAMES K, RITCHEY,NICHOLAS S, FABER,HENRY B, SCHWÄGLI,TOBIAS, RICCI,WILLIAM M, JANNA,SIED W, HEOTIS,CHARLES C.
Un sistema para identificar un punto de referencia, el sistema comprende:
un generador de campo para generar un campo magnético;
un implante ortopédico ubicado dentro del campo magnético, el implante ortopédico tiene al menos un punto de referencia ;
una sonda retirable que comprende un primer sensor magnético espaciado una distancia establecida del al menos un punto de referencia;
un identificador de punto de referencia que tiene un segundo sensor magnético ; y
un procesador para comparar datos de sensor del primer y el segundo sensor y usar la distancia establecida para calcular la posición del identificador de punto de referencia respecto al por lo menos un punto de referencia, caracterizado por que el implante ortopédico incluye un surco longitudinal en el que es insertable la sonda retirable, y en que el primer sensor magnético está espaciado la distancia establecida del al menos un punto de referencia cuando la sonda retirable se inserta en el surco.
PDF original: ES-2658591_T3.pdf
Sistema robótico para cirugía laparoscópica.
(13/09/2017). Solicitante/s: UNIVERSITAT POLITECNICA DE CATALUNYA. Inventor/es: AMAT GIRBAU,JOSEP, CASALS GELPI,ALICIA, FRIGOLA BOURLON,MANEL.
Comprende una estructura de soporte donde se acopla de manera deslizante al menos un brazo . Cada brazo comprende un primer y un segundo elemento articulados entre sí. El primer elemento está articulado de manera giratoria en la estructura de soporte y puede girar alrededor de un eje longitudinal (L1) y el segundo elemento puede recibir una articulación de por lo menos dos grados de libertad para el acoplamiento de una herramienta . El eje longitudinal (L1) del primer elemento es substancialmente perpendicular a un eje de articulación (L2) del primer elemento y el segundo elemento . Se obtiene una arquitectura simplificada que permite un movimiento espacial preciso y eficaz de la herramienta que sujeta el brazo.
PDF original: ES-2655029_T3.pdf
Características de rotación para instrumento quirúrgico ultrasónico.
(26/10/2016) Un aparato para operar en tejido, el aparato comprendiendo:
(a) un montaje de cuerpo ;
(b) un montaje de eje que se extiende distalmente desde el montaje de cuerpo, en donde el montaje de eje comprende una guía de onda acústica operativa para transmitir vibraciones ultrasónicas, en donde la guía de onda acústica define un eje longitudinal;
(c) una cuchilla ultrasónica en comunicación acústica con la guía de onda acústica;
(d) un montaje de pinza , en donde el montaje de pinza comprende un brazo de pinza que puede pivotar hacia y lejos de la cuchilla ultrasónica sobre un eje de pivotamiento; y (e) una característica…
Método para posicionar un endoscopio.
(28/09/2016) Un método para posicionar un endoscopio , que se caracteriza porque el método comprende los siguientes pasos:
a) instalar un brazo robótico , en donde el brazo robótico define un centro de movimiento remoto;
b) preparar un dispositivo de posicionamiento auxiliar , en donde el dispositivo de posicionamiento auxiliar tiene un fijador , un miembro de acoplamiento conectado de manera desmontable al fijador , y un orificio de recepción del aparato que pasa a través del fijador y el miembro de acoplamiento , e instalar el fijador del dispositivo de posicionamiento auxiliar sobre el brazo robótico…
Dispositivo para sostener y colocar a un paciente en un equipo médico.
(31/08/2016) Un dispositivo para sostener y colocar a un paciente en un equipo médico, que comprende:
un medio para sostén del paciente; y
un brazo robótico que sostiene dicho medio para sostén del paciente;
una muñeca robótica con al menos dos grados de libertad para rotación motorizados, estando dicha muñeca robótica soportada por dicho brazo robótico y soportando a dicho medio para sostén del paciente;
caracterizado por:
una unidad de liberación para traslación conectada entre dicha muñeca robótica y dicho medio para sostén del paciente, incluyendo dicha unidad de liberación para traslación:
un mecanismo…
Sistema para cirugía robótica basada en imágenes.
(08/06/2016) Un sistema quirúrgico robótico, que comprende:
una base configurada para ser fijada con respecto a una sala de operaciones;
un brazo robótico acoplado a la base , en el que el brazo robótico comprende un elemento fijo de montaje configurado para acoplarse de forma intercambiable a una herramienta quirúrgica y un elemento primero de un sistema de formación de imágenes fluoroscópicas que comprende un elemento fuente y un elemento detector, en el que el elemento primero es uno del elemento fuente y el elemento detector;
un elemento segundo del sistema de formación de imágenes fluoroscópicas, en el que el elemento segundo es el otro del elemento fuente y el elemento…
Dispositivo para cirugía asistida por robot.
(01/06/2016) Dispositivo para cirugía asistida por robot, con al menos un brazo manipulador no estéril, el cual posee una unidad de acoplamiento con elementos de accionamiento, con una unidad de instrumentos estéril dispuesta en un área estéril, la cual comprende un instrumento quirúrgico y una unidad estéril estéril para acoplar el instrumento quirúrgico a los elementos de accionamiento de la unidad de acoplamiento , con una cubierta estéril para proteger al menos una parte del brazo manipulador desde el área estéril , donde la unidad de acoplamiento comprende un elemento de accionamiento traslatorio para generar un movimiento de accionamiento…
Instrumento para cirugía robótica.
(18/05/2016) Un instrumento para cirugía robótica diseñado para montarse en el extremo distal de un brazo operativo de un aparato para cirugía robótica, comprendiendo el instrumento : medios efectores para realizar una acción determinada en el cuerpo de un paciente durante una operación quirúrgica; un conjunto de articulación para soportar dichos medios efectores y que conecta los medios efectores a dicho extremo distal de dicho brazo operativo ; y unos primeros medios de sensor , que están asociados a dicho conjunto de articulación para detectar las fuerzas y los pares de torsión aplicados a dichos medios efectores ; estando el instrumento caracterizado por que dicho…
Posicionador de herramienta articulado y sistema que emplea el mismo.
(23/03/2016) Un aparato de posicionamiento de herramienta articulado, el aparato comprende:
un elemento base, un elemento intermedio, un elemento de extremo y un primer soporte de herramienta dispuesto en sucesión, cada uno dichos elementos de base, elemento intermedio, elemento de extremo y soporte de herramienta tienen una abertura central respectiva;
una primera pluralidad de guías acopladas entre el elemento base y el elemento intermedio en el que por lo menos uno de dicha primera pluralidad de guías acopladas se acopla al elemento base y por lo menos una de dicha primera pluralidad de guías acopladas se acopla al elemento intermedio y en el que cada guía acoplada de dicha primera pluralidad de guías acopladas tiene…
Dispositivo quirúrgico ultrasónico robótico con efector final articulado.
(20/01/2016) Un aparato para operar en tejido, comprendiendo el aparato :
(a) un efector final , donde el efector final comprende una cuchilla ultrasónica y un brazo de abrazadera operable para pivotar en relación con la cuchilla ultrasónica ;
(b) un montaje de barra , donde el efector final está dispuesto en un extremo distal del montaje de barra , donde el montaje de barra define un eje longitudinal, donde el montaje de barra incluye una sección de articulación operable para desviar el efector final lejos del eje longitudinal; y
(c) un montaje de interfaz , donde el montaje de interfaz está configurado…
{kind=link}