CIP-2021 : G01S 13/93 : para anticolisión.
CIP-2021 › G › G01 › G01S › G01S 13/00 › G01S 13/93[2] › para anticolisión.
Notas[n] desde G01S 13/00 hasta G01S 17/00: - Los grupos G01S 13/00 - G01S 17/00 cubren :
- los sistemas para detectar la presencia de un objeto, p. ej. por reflexión o por rerradiación desde el mismo objeto o desde un transpondedor asociado al objeto, para determinar la distancia o la velocidad relativa de un objeto, para proporcionar una representación coordenada de la distancia y de la dirección de un objeto o para obtener su imagen;
- los sistemas dispuestos para ser montados en una nave o vehículo móviles y que utilizan la reflexión de ondas en una superficie extensa externa a la nave, p. ej. sobre la superficie de la tierra, para determinar la velocidad y la dirección del movimiento de la nave con relación a la superficie.
- Los grupos G01S 13/00 - G01S 17/00 no cubren :
- los sistemas para determinar la dirección de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por los grupos G01S 1/00 o G01S 3/00;
- los sistemas para determinar la distancia o la velocidad de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por el grupo G01S 11/00 .
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
G01S 13/93 · · para anticolisión.
CIP2021: Invenciones publicadas en esta sección.
Comprobación de validez de información de posición de un vehículo transmitida a través de un enlace de datos sincronizado en el tiempo.
(09/10/2013) Un procedimiento de validación de datos de posición en aplicaciones de vigilancia de vehículos, en el que losvehículos (3, 5, 5') transmiten los datos de posición que indican su propia posición a los vehículos circundantes (3, 5,5'), comprendiendo dicho procedimiento las etapas de:
recibir (S1), en una unidad de recepción , una primera señal (13; 13', 13") que transporta datos deposición que indican una supuesta posición (PADS-B ; PADS-B(5') , PADS-B (15")) de un vehículo, transmitidadesde una fuente de radio (5; 5', 15") a través de un enlace de datos;
estimar (S2) la distancia (dEST , dEST(5'), dEST(15")) entre la unidad de recepción y la fuente de radio (5; 5',15") en base al tiempo de vuelo, TOF, y la velocidad de propagación de la señal recibida (13; 13', 13"), ydeterminar (S3) un valor de desviación…
Verificación de validez de información de posición de un vehículo.
(02/10/2013) Un procedimiento de validación de datos recibidos de posición en aplicaciones de vigilancia de vehículos, en elque los vehículos transmiten datos de posición que indican su propia posición a vehículos circundantes (3, 5; 5')en mensajes en Modo S ES, que son mensajes ADS-B en conformidad con el formato en Modo S ES,caracterizado porque comprende las etapas de:
recibir (S1), con una disposición de antena radiogoniométrica de una unidad de recepción, unaseñal (13; 13', 13") que transporta datos de posición que comprenden un mensaje en Modo S ES, que indicanuna posición supuesta (PADS-B ; PADS-B(5'), PADS-B(15"))…
Procedimiento de radar y sistema de radar para automóviles.
(04/09/2013) Procedimiento de radar-FMCW, en el que un sistema de radar de un automóvil irradia y recibe ondas deradar y en el que se determina una distancia de un objeto con respecto al automóvil a partir de undesplazamiento de la frecuencia entre onda de radar emitidas y recibidas y en el que se determina una velocidad deun objeto, en el que el procedimiento se realiza en primeros intervalos de tiempo (T_A, T_B) para objetos en almenos una primera sección parcial (A, B) de una zona de detección del sistema de radar , y en segundosintervalos de tiempo (T_C, T_D, T_E, T_F, T_G) se determinan distancias, pero no velocidades para objetos en almenos una…
Proceso de detección de un ave u objeto volador.
(21/08/2013) Proceso de detección de un objeto volador, en particular un ave, al nivel de un solo aerogenerador , en elcual se utilizan medios de detección de al menos un ave u otro objeto volador por ondas radio, en forma deal menos dos radares , caracterizado por que consiste en:
- posicionar dos radares independientes uno de otro ;
- inclinar cada radar sobre su eje horizontal de modo que la altura vertical de la haz de ondas emitida en el eje de dicho aerogenerador por cada radar englobe toda o parte de una esfera formada por el volumen teórico de barrido de las palas en rotación del aerogenerador ;
- transformar la imagen analógica resultante en dos dimensiones de cada radar en una imagendigital independiente para cada radar ;
- aplicar en cada imagen digital…
Radar de detección de objetivos aéreos montado en una aeronave particularmente para evitar obstáculos en vuelo.
(30/07/2013) Dispositivo de radar de detección de objetivos aéreos transportado por una aeronave , comprendiendodicho dispositivo unos medios de emisión de una onda de hiperfrecuencia en dirección a un objetivo , teniendodicha onda una forma doble, estando compuesta una primera forma de onda de almenos dos sinusoides de frecuencias diferentes (F1, F2) emitidas simultáneamente, comprendiendo elradar unos circuitos de recepción que reciben las señales reflejadas por el objetivo y unos medios de análisis queefectúan la detección del objetivo a partir de las señales recibidas, caracterizado porque la segunda forma de ondaes del tipo de pulsos , siendo la forma de onda emitida función de…
Procedimiento seguro de cierre automático de un portón de vehículo automóvil.
(11/04/2013) Procedimiento seguro de cierre automático de un portón de vehículo automóvil equipado de al menos unsensor de presencia de un elemento, particularmente de un individuo, en una zona dedetección, presentando dicha zona de detección al menos una zona de sombra, comprendiendodicho procedimiento la etapa de condicionar la operación de cierre automático del portón del vehículo a la realizaciónde las diferentes operaciones siguientes:
- recibir una orden de cierre automático del maletero del vehículo;
- desde la recepción de la orden automática de cierre automático del maletero del vehículo, activar una primeracuenta atrás de una primera duración;
- detectar la presencia de un elemento en la zona de detección;
- detectar una salida de dicho elemento fuera de la…
Procedimiento de localización de uno o de varios emisores.
(09/04/2013) Procedimiento de localización de una o de varias fuentes, encontrándose dicha o dichas fuentes en movimiento con respecto a una red de sensores, comprendiendo el procedimiento una etapa de separación de las fuentes con el fin de identificar los vectores directores asociados a la respuesta de los sensores en una fuente de incidencia dada, siendo los ángulos de incidencia variables y dependientes de la posición de la red de sensores y de dichas fuentes, que comprende las siguientes etapas:
* asociar los vectores directores a1m...aKm obtenidos para el m-ésimo emisor y respectivamente para los instantes t1...tK, durante un intervalo Dt con…
Verificación de la validez de la información de posición de un vehículo.
(09/04/2013) Un procedimiento para validar datos recibidos de posición en aplicaciones de vigilancia de vehículos, en el quelos vehículos transmiten datos de posición que indican su propia posición a vehículos circundantes (3, 5; 5'),comprendiendo el procedimiento las etapas de:
recibir (S1), con una disposición de antena radiogoniométrica de una unidad de recepción, unaseñal (13; 13', 13") que transporta datos de posición que indican una posición supuesta (PADS-B ; PADS-B(5'),PADS-B(15")) de un vehículo, transmitida desde una fuente (5; 5', 15") de radio;
estimar (S2) el azimut desde la unidad de recepción hasta dicha fuente (5; 5', 15") de radio utilizandodicha disposición de…
Sistema de control de despliegue de ingenios espaciales que deben volar en formación , por determinación simultánea y de gran precisión de sus posiciones.
(08/03/2013) Sistema de control del despliegue inicial de al menos dos ingenios espaciales (ESi) provistos de medios demaniobra (MDi) y que tienen por objeto desplazarse según una formación seleccionada, el sistema de control incluyeun dispositivo de control, caracterizado porque el dispositivo de control está implantado en tierra y comprende i)unos primeros medios de medición (MM1j) que comprenden al menos dos estaciones de medición (SMj)implantadas en tierra en lugares seleccionados y dispuestas cada una para medir sustancialmente de formasimultánea al menos las distancias que las separan de dichos ingenios espaciales, ii) unos medios de tratamiento(MT) acoplados a las dos…
DISPOSITIVO MOVIL DE SEGURIDAD PARA AMARRADORES PORTUARIOS.
(30/01/2013) 1. Dispositivo móvil de seguridad para amarradores portuarios, caracterizado porque comprende:
- un distanciómetro láser configurado para realizar mediciones periódicas a cerca de la distancia a la que se encuentra el buque del dispositivo;
- un reloj de precisión que determina los instantes de tiempo en los que el distanciómetro láser realiza las mediciones;
- un equipo informático , conectado mediante cableado al distanciómetro láser , comprende una base de datos que almacena las mediciones periódicas realizadas con el distanciómetro láser y las defensas existentes en cada una de las instalaciones de atraque del puerto, donde dicho equipo…
SISTEMA DE ADVERTENCIA COLOCADO EN UN VEHÍCULO ESTACIONADO, QUE UTILIZANDO SENSORES DETECTA VEHÍCULOS CERCANOS, Y MEDIANTE LUCES Y SONIDOS LES ADVIERTE DE SU PROGRESIVO ACERCAMIENTO AL VEHÍCULO APARCADO.
(29/01/2013) Sistema que protege a un vehículo aparcado, advirtiendo a los vehículos que maniobran cerca.
El vehículo aparcado utiliza el sistema de sensores de ayuda al estacionamiento para detectar que otros vehículos maniobran cerca, y mediante señales luminosas y sonoras, provenientes de los faros y de un altavoz o emisor, les advierte de su progresivo acercamiento al vehículo aparcado, primero mediante señales intermitentes, y según se vaya reduciendo la distancia, mediante señales más frecuentes, que se vuelven continuas al llegar a la mínima distancia de 30-40 cms.
Sistema para evitar colisiones.
(19/09/2012) Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso que comprende los pasosde:
- detectar un vehículo intruso dentro de una región predeterminada en torno al 5 vehículo anfitrión y recoger datossobre la posición del vehículo intruso en función del tiempo;
- predecir una trayectoria proyectada del vehículo intruso usando una extrapolación cuadrática de los datosde posición del vehículo intruso;
- asignar una región de protección en torno al vehículo anfitrión;
- determinar si la trayectoria proyectada del vehículo intruso interceptará la región de protección del vehículoanfitrión y determinar con ello si habrá un conflicto, y,
- al determinarse que habrá un conflicto entre el vehículo anfitrión y el vehículo intruso, calcular una alteracióndel rumbo del vehículo anfitrión de modo…
DISPOSITIVO MOVIL DE SEGURIDAD PARA AMARRADORES PORTUARIOS.
(19/09/2012) El dispositivo móvil de seguridad para amarradores portuarios es una invención que analiza si existe riesgo en la maniobra de atraque de un buque, mediante la medición de la velocidad del mismo, y su relación con una base de datos en la que se incluyen las características de las instalaciones portuarias y de carga del propio buque. El análisis se realiza empleando un distanciómetro láser y una aplicación informática instaladas en un soporte móvil, contando dicha aplicación informática con una base de datos de las instalaciones portuarias y de los buques que atraquen en dichas instalaciones portuarias, y evaluando su peligrosidad, manifestando los resultados mediante señales de tipo visual (luces roja y verde) y acústico.
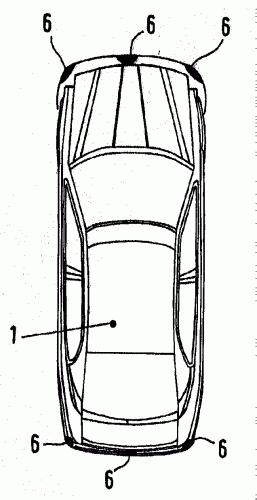
PROCEDIMIENTO Y DISPOSITIVO PARA CAPTAR LA SITUACION DE MARCHA DE UN VEHICULO AUTOMOVIL.
(01/04/2007). Ver ilustración. Solicitante/s: VOLKSWAGEN AKTIENGESELLSCHAFT. Inventor/es: BAKER, WOLFGANG, RUCHATZ, THOMAS, DIPL.-ING., ANDREAS, PETER, DIPL.-ING.
LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA REGISTRO DE LA SITUACION DE VIAJE DE UN AUTOMOVIL POR MEDIO DE UNA DISPOSICION DE SENSOR DE DISTANCIA, DONDE POR MEDIO DE LOS DATOS REGISTRADOS EN LA APLICACION DE SENSOR DE DISTANCIA SE DETERMINAN LOS PARAMETROS DE TRAFICO, A PARTIR DE LOS CUALES PUEDE OBTENERSE LA SITUACION DE VIAJE.
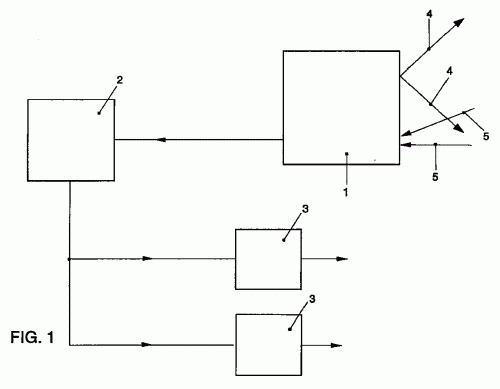
SENSOR DE RADAR PARA VEHICULOS CON UN LOBULO LATERAL DE ANTENA DIRIGIDO A LA SUPERFICIE DE LA CALZADA.
(01/03/2007). Ver ilustración. Solicitante/s: ROBERT BOSCH GMBH. Inventor/es: BEEZ, THOMAS, LEHRE, KLAUS.
Sensor de radar para vehículos, con un dispositivo de emisión y recepción cuya característica direccional presenta varios lóbulos de los cuales al menos un lóbulo está orientado paralelo a la superficie de calzada y que se genera por una de tres antenas de parche, estando dispuestas las tres antenas de parche de manera adyacente en una línea horizontal que discurre paralela a la superficie de calzada, caracterizado porque al menos otro lóbulo está orientado de manera oblicua a la superficie de calzada, que se genera por otra antena de parte que se dispone fuera de la línea horizontal de manera que se dispone fuera de las tres antenas de parche.
SISTEMA DE AYUDA AL APARCAMIENTO Y PROCEDIMIENTO CORRESPONDIENTE.
(01/12/2006). Solicitante/s: INA-SCHAEFFLER KG. Inventor/es: OSTERLINGER, JURGEN, KRAUS, MANFRED.
Procedimiento para accionar un sistema de ayuda al aparcamiento para un vehículo con al menos un sensor de distancia, que registra al menos por segmentos la zona lateral cercana del vehículo, y al menos un sensor de recorrido, que registra el recorrido realizado por el vehículo, determinándose la longitud y/o la anchura del espacio libre de aparcamiento a partir de los valores medidos por los sensores al pasar delante de un espacio libre de aparcamiento, caracterizado porque la medición se realiza en diferentes intervalos de tiempo mediante el sensor de distancia en función de la velocidad (v) del vehículo al pasar delante del espacio libre de aparcamiento.
PROCEDIMIENTO DE TRATAMIENTO PROBABILISTA DE PUNTOS DETECTADOS POR UN SISTEMA DE SUPERVISION DEL ENTORNO CIRCUNDANTE.
(01/08/2006) Un procedimiento de supervisión del entorno circundante de un vehículo , que comprende: - la medición por medio de un sistema de supervisión del entorno circundante, de la posición de al menos un punto, y - el cálculo, para un punto cuya posición ha sido medida por el sistema de supervisión del entorno circundante, de un conjunto de posiciones posibles del punto, teniendo en cuenta este cálculo la incertidumbre de la medición de la posición del punto por parte del sistema de supervisión, que se caracteriza porque: - el cálculo de un conjunto de posiciones posibles del punto se realiza en un instante futuro, y porque, - el procedimiento…
METODO Y SISTEMA PARA ASISTIR AL CONDUCTOR DE UN VEHICULO AUTOMOVIL EN UNA MANIOBRA DE CAMBIO DE CARRIL.
(01/06/2006) Método para asistir al conductor de un automóvil en una maniobra de cambio de carril, mediante la señalización del estado de emergencia generado por el acercamiento de otro automóvil en el mismo carril sobre el que se está desplazando el primer automóvil, incluyendo dicho método: - disponer unos medios de detección optoelectrónicos pasivos digitales , del tipo CMOS, sobre el espejo retrovisor externo del primer automóvil, - tratar las señales emitidas por dichos medios de detección acerca de la posición del automóvil (A) con respecto al lado (M) más cercano al carril (L1) sobre el que se está desplazando, - tratar las señales emitidas por dichos medios de detección para detectar cuándo un vehículo (D) que le está siguiendo se está acercando sobre el carril…
VEHICULO CON AL MENOS UNA PUERTA BASCULABLE.
(01/05/2006). Ver ilustración. Solicitante/s: BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT. Inventor/es: KEHRER, MANFRED.
Vehículo con al menos una puerta basculable y con un dispositivo para impedir una colisión de la puerta con un objeto contiguo al vehículo durante la apertura de la puerta, caracterizado porque un sensor con lógica de evaluación pospuesta capta durante un movimiento del vehículo que precede directamente a la apertura de la puerta el objeto en su posición y en su variación de posición con relación al vehículo, y reconoce su posición al parar el vehículo sobre la base del análisis del movimiento del vehículo con respecto al obstáculo formado por el objeto , y porque cuando existe el riesgo de colisión entre el objeto y la puerta del vehículo, se puede poner en marcha una medida que reduzca este riesgo.
SISTEMAS Y PROCEDIMIENTOS PARA LA PRESENTACION DE LA ALTITUD EN UNA AERONAVE.
(16/11/2005) Sistema de control de tráfico aéreo para transmitir la localización de un objeto, caracterizado porque comprende: un primer mecanismo para recibir información sobre la localización en relación con dicho objeto, comprendiendo dicha información sobre la localización una primera coordenada x, una segunda coordenada y, y una tercera coordenada z; en el que dicha tercera coordenada z representa una altitud absoluta de dicho objeto relativa a una referencia geográfica terrestre; un segundo mecanismo para establecer una correlación entre dichas primera y segunda coordenadas (x, y) con una localización de un icono en un espacio bidimensional en una pantalla electroóptica; y un tercer mecanismo para establecer una correlación entre dicha tercera coordenada…
PROCEDIMIENTO Y APARATO PARA RECHAZAR PERTURBACIONES PLUVIALES EN UN SISTEMA DE RADAR.
(16/11/2005) Se presenta un procedimiento y un aparato para detectar la presencia de objetos en los puntos ciegos del conductor de un vehículo. El aparato comprende un sistema de radar Doppler lateral que utiliza una transmisión de ondas (CW) continua con una operación de modulación de frecuencia (FM) de una técnica de conmutación de modulación de frecuencia. El sistema de radar determina la presencia, distancia y velocidad de aproximación de los objetivos detectados. El sistema de radar detecta objetivos incluso cuando funciona en condiciones metereológicas adversas y no genera falsos avisos debidos a la plubioperturbación provocados por carreteras mojadas y otros…
AYUDA DE APARCAMIENTO PARA UN AUTOMOVIL CON UNIDAD INDICADORA OPTICA.
(16/04/2005). Ver ilustración. Solicitante/s: VALEO SCHALTER UND SENSOREN GMBH. Inventor/es: LOCHTE, GUIDO.
Unidad indicadora óptica para una ayuda de aparcamiento de un automóvil, caracterizada porque la unidad indicadora óptica es mandada por la salida de emisor sonoro de un aparato de mando , y porque la unidad indicadora óptica está provista de un dispositivo de evaluación para la transformación de las señales de emisor sonoro en señales de mando para la unidad indicadora óptica.
PROCEDIMIENTO PARA EL FUNCIONAMIENTO DE UN SISTEMA DE ASISTENCIA AL CONDUCTOR PARA VEHICULOS.
(16/04/2005). Solicitante/s: AUTOMOTIVE DISTANCE CONTROL SYSTEMS GMBH. Inventor/es: MASSEN, JOACHIM.
Procedimiento para el funcionamiento de un sistema de asistencia al conductor para vehículos , en el que en el funcionamiento siguiente tiene lugar una regulación de la velocidad del vehículo que depende de los objetivos detectados a distancia (dz) y clasificados como relevantes, caracterizado porque mediante el accionamiento de un elemento de mando que debe accionarse por el usuario del vehículo , en el funcionamiento siguiente , se seleccionan los objetivos relevantes considerados para la regulación de la velocidad.
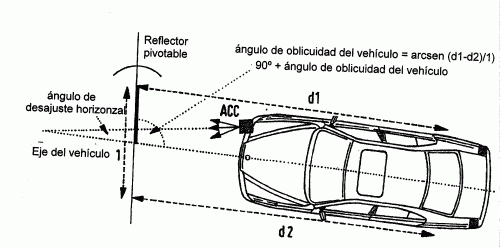
PROCEDIMIENTO PARA AJUSTAR UN SENSOR DE RUEDA DISPUESTO EN UN VEHICULO.
(01/04/2005). Ver ilustración. Solicitante/s: BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT. Inventor/es: SAUER, THOMAS, BAUER, GUNTER, EBERL, MARKUS, PRESTL.
Procedimiento para ajustar un sensor de rueda dispuesto en un vehículo con tres cabezas de radar desplegadas en forma de abanico, de las cuales una discurre centralmente y las otras dos discurren lateralmente bajo el mismo ángulo, caracterizado porque se hace pivotar en torno a un eje vertical una placa de reflector dispuesta a distancia del vehículo y perpendicularmente al eje longitudinal del vehículo y se determina la desviación de la posición angular de la placa del reflector respecto de una posición ideal en la que las dos cabezas laterales del radar suministran una señal de reflexión al menos aproximadamente igual, y porque seguidamente se hace bascular el sensor de radar en un ángulo de corrección que es opuesto e igual a la desviación de ángulo de posición de la placa del reflector.
DISPOSITIVO PARA LA DETECCION TRIDIMIENSIONAL DEL ENTORNO DE UN VEHICULO.
(01/01/2005). Ver ilustración. Solicitante/s: DAIMLERCHRYSLER AG. Inventor/es: REGENSBURGER, UWE, SCHANZ,ALEXANDER, STAHS,THOMAS.
Dispositivo para la detección tridimensional del entorno de un vehículo. En la actualidad no es posible una detección tridimensional, idónea para vehículos y de alta resolución, del entorno de un vehículo de carretera con sensores detectores del entorno. Mediante la novedosa configuración de una disposición de distancia bidimensional y de resolución de la distancia se crea un sistema que, instalado en un vehículo de carretera, puede detectar un escenario complejo y dinámico, por ejemplo, el tráfico rodado, desde el punto de vista del vehículo que actúa de forma dinámica, y evaluarlo para ventaja del mismo. Aquí se produce una imagen tridimensional del entorno mediante un sensor de distancia que genera un perfil de distancia bidimensional (perfil de profundidad), a partir de una unidad de procesamiento de datos y una unidad de memoria que procesa y almacena perfiles de distancia secuenciales, y a partir de la yuxtaposición de una cantidad consecutiva de perfiles de distancia.
SISTEMA Y PROCEDIMIENTO PARA EVITAR LA COLISION ENTRE VEHICULOS.
(16/10/2004) Un sistema para evitar la colisión entre vehículos, que comprende medios para comunicación de datos hasta y desde el vehículo respectivo, comprendiendo el sistema además: - medios para cálculo continuo de una posición futura (P1, P2) para el vehículo respectivo, - medios para determinar, coordinada entre los vehículos, una dirección (Di) de maniobra de evitación para el vehículo respectivo, - medios para cálculo de una trayectoria (Tr1, Tr2) de maniobra de evitación para el vehículo respectivo, basándose en la posición futura (P1, P2) calculada y la dirección (Di) de maniobra de evitación para el vehículo, estando caracterizado el sistema por comprender…
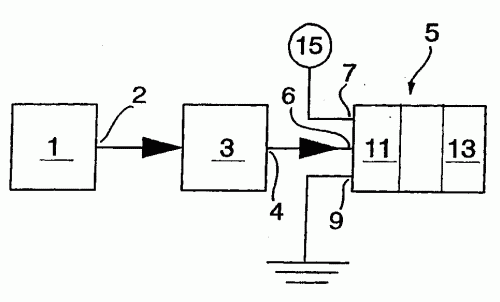
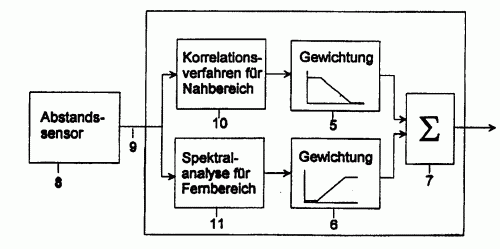
PROCEDIMIENTO DE MEDIDA DE LA DISTANCIA ENTRE UN VEHICULO AUTOMOVIL Y UN OBJETO.
(16/06/2004). Ver ilustración. Solicitante/s: BAYERISCHE MOTOREN WERKE AKTIENGESELLSCHAFT. Inventor/es: DONGES, EDMUND, DR.
EN UN PROCEDIMIENTO DE MEDICION PARA LA DISTANCIA ENTRE UN VEHICULO DE MOTOR Y UN OBJETO SE TIENEN EN CUENTA DE FORMA DOMINANTE EN EL VEHICULO DE MOTOR, PARA UNA PEQUEÑA DISTANCIA AL OBJETO, LAS SEÑALES DE SALIDA DE UN PRIMER DISPOSITIVO DE MEDICION CON UN MARGEN DE MEDICION CORRESPONDIENTE Y, PARA UNA DISTANCIA MAYOR AL OBJETO, LAS SEÑALES DE SALIDA DE UN SEGUNDO DISPOSITIVO DE MEDICION CON UN MARGEN DE MEDICION CORRESPONDIENTEMENTE MAYOR. LOS DISPOSITIVOS DE MEDICION SE HAN EJECUTADO COMO DISPOSITIVOS DE ANALISIS, A LOS QUE SE ALIMENTA COMO SEÑAL DE ENTRADA LA SEÑAL DE SALIDA DE UN UNICO RECEPTOR PARA UN UNICO TRANSMISOR DE DISTANCIAS Y VALORAN ESTA SEÑAL DE ENTRADA CON UN PROCEDIMIENTO DE ANALISIS CARACTERISTICO PARA EL MARGEN DE DISTANCIAS MENOR O EL MARGEN DE DISTANCIAS MAYOR.
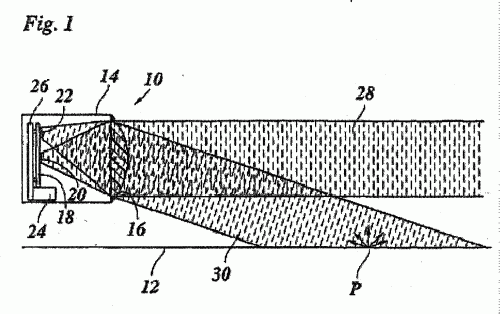
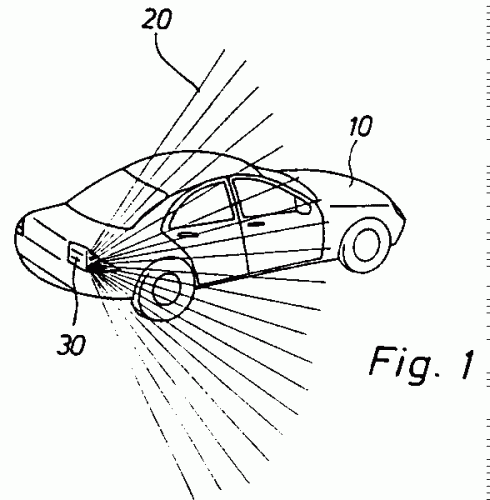
DETECTOR DE OBSTACULOS QUE FUNCIONA POR COLIMACION Y ENFOQUE DE LA ONDA EMITIDA.
(16/06/2004). Ver ilustración. Solicitante/s: BALDI, FRANCO. Inventor/es: BALDI, FRANCO.
DISPOSITIVO DE ONDAS MILIMETRICAS, CAPAZ DE FUNCIONAR COMO UNA ANTENA TRANSCEPTORA DE SEÑAL, CON UNA OPTIMA DEFINICION DE IMAGEN INCLUSO A DISTANCIAS EXTREMADAMENTE CORTAS (ALREDEDOR DE 1 MM). DEPENDIENDO DE LA MAYOR O MENOR CONCENTRACION DE LAS ONDAS, LA ANTENA RADARICA REALIZADA DE ESTA MANERA ADOPTA, EN SUS DIFERENTES CONFIGURACIONES, UNA OPTICA FRONTAL CURVADA, O UNA OPTICA HEMISFERICA, ASFERICA, PARABOLICA, CONCAVA, CONVEXA, BICONCAVA, BICONVEXA O UNA OPTICA ESCALONADA. LA LONGITUD FOCAL REAL DEL RADAR ES MAS CORTA QUE LA DE LA LENTE UTILIZADA EN DICHA ANTENA. LAS DIMENSIONES ESTANDAR DE LA PIEZA DEL CIRCUITO ELECTRONICO TRANSCEPTOR Y PROCESADOR, SON MUY LIMITADAS Y CONTENIDAS.
PROCEDIMIENTO PARA LA DETECCION DE OBJETOS DE DESTINO Y PARA LA DETERMINACION DE SU DIRECCION PARA UN APARATO DE RADAR EN UN AUTOMOVIL.
(16/12/2003). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: DIRFLER, REINER.
Procedimiento para la detección de objetos de destino y para la determinación de su dirección, distancia, velocidad y similares para un aparato de radar especialmente para la aplicación en automóviles con las siguientes etapas del procedimiento: - disposición de al menos tres instalaciones de emisión y de recepción (A, B, C, D, E) para rayos de radar, de tal manera que sus campos de rayos (a, b, c, d, e) forman la región de detección del aparato de radar , - activación y desactivación sucesivas de las al menos tres instalaciones de emisión y de recepción (a, B, C, D, E), de tal manera que se accionan al mismo tiempo al menos dos instalaciones de emisión y de recepción adyacentes, y - evaluación de las señales de eco de las instalaciones de emisión y de recepción (A, B, C, D, E) según el procedimiento de monoimpulsos.
PROCEDIMIENTO DE REGULACION DE DISTANICA PARA UN VEHICULO AUTOMOVIL.
(01/07/2003) LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA LA REGULACION DE DISTANCIA PARA UN VEHICULO DE MOTOR, EN EL QUE SE DETERMINAN, A TRAVES DE UNOS DISPOSITIVOS SENSORIALES, AL MENOS LA VELOCIDAD DE MARCHA MOMENTANEA (V{SUB,E}) DEL VEHICULO DE MOTOR Y LA DISTANCIA MOMENTANEA (D{SUB,0}) RESPECTO A UN OBJETO SITUADO DELANTE DEL VEHICULO DE MOTOR, Y A PARTIR DE LAS DIMENSIONES RECOGIDAS SE DETERMINA, POR MEDIO DE UN OPERADOR II, UNA ACELERACION DESEADA DEPENDIENTE DE LA DISTANCIA (A{SUB,WU1}). CONFORME A LA INVENCION SE DETERMINA AL MENOS UNA ACELERACION DESEADA (A{SUB,WU2}) DEPENDIENTE DE LA VELOCIDAD, A PARTIR DE UNA VELOCIDAD DESEADA (V{SUB,WU}) QUE EL CONDUCTOR DEL VEHICULO PUEDE INTRODUCIR PREVIA Y MANUALMENTE, Y SE RELACIONA CON LA ACELERACION DESEADA (A{SUB,WU1})…
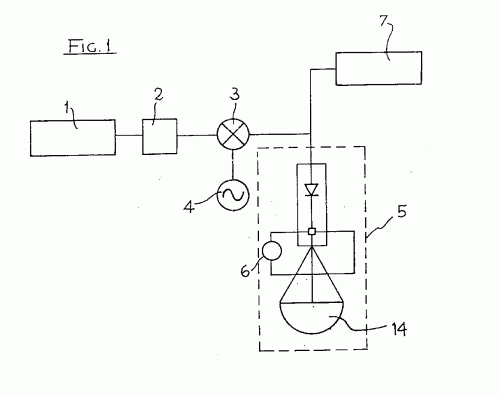
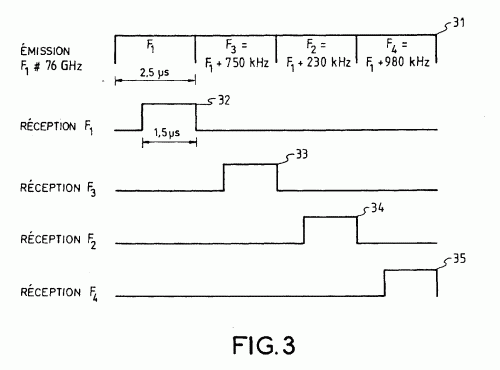
RADAR DE DETECCION DE OBSTACULOS ESPECIALMENTE A LOS VEHICULOS AUTOMOVILES.
(16/03/2003). Ver ilustración. Solicitante/s: THOMSON-CSF. Inventor/es: CORNIC, PASCAL, ARTIS, JEAN-PAUL.
LA INVENCION SE REFIERE A UN RADAR DE DETECCION DE OBSTACULOS. EL RADAR UTILIZA AL MENOS CUATRO FRECUENCIAS LLAMADAS F SUB,1 , F 2 , F 3 Y F 4 TALES QUE: DONDE CTE REP RESENTA UN VALOR DE FRECUENCIA CONSTANTE. LA MEDIDA DE LA DISTANCIA AL BLANCO SE EFECTUA A PARTIR DE LA DIFERENCIA DE FASE ENTRE DOS SEÑALES FORMADAS PARA EL PRIMER (R 1 (T) - R 3 (T)) POR LA DIFERENCIA DE DOS SEÑALES RECIBIDAS CORRESPONDIENTES, RESPECTIVAMENTE, A LAS FRECUENCIAS F 1 Y F 3 Y PARA EL SEGUNDO (R 2 (T) - R 4 (T)) POR LA DIFERENCIA DE DOS SEÑALES RECIBIDAS CORRESPONDIENTES, RESPECTIVAMENTE, A LAS FRECUENCIAS F 2 Y F 4 . APLICACION EN PARTICULAR A LA REGULACION DE LA VELOCIDAD DE LOS AUTOMOVILES.
METODO PARA LA DETERMINACION DE LA TRAYECTORIA DE CIRCULACION DE UN VEHICULO.
(16/06/2002) LA INVENCION SE REFIERE A UN METODO PARA DETERMINAR EL CURSO DE OTRO VEHICULO EN RELACION CON EL VEHICULO PROPIO MIDIENDO LA POSICION DEL OTRO VEHICULO EN RELACION CON EL VEHICULO PROPIO POR MEDIO DE UN SISTEMA DE TRANSMISOR/RECEPTOR, TAL COMO UN SISTEMA DE RADAR. EL METODO PERMITE LA DETERMINACION DEL CURSO DEL VEHICULO TANTO COMO EN SEGMENTOS RECTOS COMO CURVOS. DE ACUERDO CON EL METODO LA UBICACION LATERAL (D) DEL OTRO VEHICULO Y DEL VEHICULO PROPIO SE DETERMINAN EN UNA POSICION EN LA QUE EL OTRO VEHICULO ESTA A NIVEL CON EL VEHICULO PROPIO, MOVIENDO EL VEHICULO DE ENFRENTE HACIA ATRAS A TIEMPO Y/O MOVIENDO…
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}