CIP-2021 : G01S 13/93 : para anticolisión.
CIP-2021 › G › G01 › G01S › G01S 13/00 › G01S 13/93[2] › para anticolisión.
Notas[n] desde G01S 13/00 hasta G01S 17/00: - Los grupos G01S 13/00 - G01S 17/00 cubren :
- los sistemas para detectar la presencia de un objeto, p. ej. por reflexión o por rerradiación desde el mismo objeto o desde un transpondedor asociado al objeto, para determinar la distancia o la velocidad relativa de un objeto, para proporcionar una representación coordenada de la distancia y de la dirección de un objeto o para obtener su imagen;
- los sistemas dispuestos para ser montados en una nave o vehículo móviles y que utilizan la reflexión de ondas en una superficie extensa externa a la nave, p. ej. sobre la superficie de la tierra, para determinar la velocidad y la dirección del movimiento de la nave con relación a la superficie.
- Los grupos G01S 13/00 - G01S 17/00 no cubren :
- los sistemas para determinar la dirección de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por los grupos G01S 1/00 o G01S 3/00;
- los sistemas para determinar la distancia o la velocidad de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por el grupo G01S 11/00 .
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
G01S 13/93 · · para anticolisión.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA DE MICRO CAMARAS CON SENSORES DE MOVIMIENTO PARA AYUDA A LA CONDUCCIÓN.
(21/01/2020) 1. Sistema de micro cámaras con sensores de movimiento para ayuda a la conducción, caracterizado esencialmente, porque está formado por micro cámaras equipadas con sensores de movimiento que reportan su visión a una pantalla central, el sistema dispone de micro cámaras con sensores de movimiento para la visión y control delantera , para la visón y control trasera , para la visión y control lateral izquierda y para la visión y control lateral derecha .
2. Sistema de micro cámaras con sensores de movimiento para ayuda a la conducción, según la reivindicación anterior, caracterizado esencialmente, porque la pantalla central, está localizada el salpicadero del vehículo, y tiene…
Mejoras aportadas y relativas a los datos de rumbos de navegación y/o de velocidad de un buque.
(15/10/2019). Solicitante/s: BAE SYSTEMS PLC. Inventor/es: NOYES,STEPHEN PAUL.
Un método para determinar una velocidad de un buque, en donde el buque es una embarcación , ubicada en una zona litoral, que comprende las etapas de:
detectar objetos en las proximidades de la embarcación, utilizando un sistema de radar utilizable para identificar y efectuar el seguimiento de los objetos;
seleccionar un objeto que tenga una velocidad relativa al buque que es inferior al umbral predefinido; y
determinar la velocidad del buque para que sea opuesta a la velocidad del objeto.
PDF original: ES-2727346_T3.pdf
Dispositivo para un vehículo.
(11/09/2019) Procedimiento para medir un posible espacio de estacionamiento (P) mediante un vehículo que pasa al espacio de estacionamiento (P), donde
mediante un dispositivo de detección en el vehículo se detecta la longitud del espacio de estacionamiento (LP), durante un tiempo de activación (T1) con un sensor de distancia , las señales de medición (M) se transmiten y las señales de medición (M) reflejadas por los objetos son detectadas por el sensor de distancia dentro de un tiempo de recepción de la medición (T2), dicho tiempo de recepción de la medición (T2) se cambia para medir la longitud del espacio de estacionamiento (LP),
caracterizado porque el tiempo de recepción de la medición (T2) aumenta o se establece en un valor máximo al detectar un comienzo de espacio…
Aparato de tratamiento de señales para generar un mapa de Alcance-Doppler.
(28/08/2019) Aparato de tratamiento de señales para generar un mapa de alcance-Doppler , comprendiendo el aparato:
una unidad de cálculo de transformada rápida de Fourier (FFT) bidimensional, para calcular un mapa de alcance-Doppler , incluyendo el mapa de alcance-Doppler una pluralidad de puntos, teniendo cada punto un valor de alcance y un valor de velocidad Doppler; y
una primera memoria , para almacenar un primer mapa de alcance-Doppler emitido por la unidad de FFT bidimensional;
caracterizado por que el aparato comprende, además:
una primera unidad de deformación , para aplicar un desplazamiento en el alcance a cada punto en el mapa de alcance-Doppler almacenado; y
un primer integrador , para agregar un mapa de alcance-Doppler actual,…
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado.
(31/07/2019) Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por el sensor de entorno se verifican contra al menos un criterio de verificación que indica un funcionamiento correcto usando al menos un valor de umbral, caracterizado porque mediante un dispositivo de control en función de al menos una información de posición que describe un entorno actual del vehículo motorizado , al menos un valor de umbral del criterio de verificación es adaptado dinámicamente durante la marcha y/o el autodiagnóstico se interrumpe temporalmente, en donde una indicación de localización es detectada mediante un sensor de localización de…
MÉTODO DE DETECCIÓN Y GESTIÓN DE FATIGA MENTAL DURANTE LA CONDUCCIÓN BASADO EN ANALISIS DE MIRADA Y DETECCION DE OBJETOS.
(27/06/2019). Solicitante/s: PARDO GUZMAN, Dino Alejandro. Inventor/es: MARÍN HERNÁNDEZ,Antonio, SANCHEZ GONZALEZ,Marcos Antonio.
Un método y detección y gestión de fatiga mental para aumentar la seguridad y confort de los conductores de tracto camiones, basado en análisis de mirada y detección de objetos en el camino, así como la gestión de mediante un asistente inteligente vial para evitar fatiga mental (cognitiva) con conversaciones y advertencias para el conductor.
SISTEMA DE CONDUCCIÓN ASISTIDA BASADO EN UNA RED DE COMUNICACIÓN DE ONDA MILIMÉTRICA Y DETECCIÓN DE OBJETOS POR TÉCNICAS RADAR.
(27/06/2019). Solicitante/s: KITAZAWA MOLINA, Elvia Isabel. Inventor/es: GUTIERREZ LIZARRAGA,Hiram, MARÍN HERNÁNDEZ,Antonio.
La presente invención describe un sistema de integración de componentes en vehículos y un método de operación de los mismos que posibilita al conductor desarrollar un desempeño de manejo más seguro y eficiente, a través de comunicación de vehículo-vehículo, complementado un sistema transceptor ZigBee con técnicas de detección por Radar, que le determinan un intercambio de información con la red de vehículos que anticipará distintas anormalidades en la ruta, ya sea por datos enviados por dichos vehículos o generación propia información como la posición en un ambiente de tráfico.
Sistema satelital autónomo de evitación de desechos orbitales.
(15/05/2019) Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , en donde el satélite incluye:
un dispositivo de seguimiento de desechos orbitales adaptado para proporcionar datos de seguimiento sobre un fragmento de desecho;
un procesador de determinación de órbitas adaptado para recibir dichos datos de seguimiento de dicho dispositivo de seguimiento de desechos orbitales y calcular las órbitas de los desechos, para producir datos de elementos orbitales de los desechos y para calcular los elementos orbitales de los satélites a partir de sensores integrados o datos almacenados a bordo o ambos;
un procesador de efemérides adaptado para recibir dichos datos de elementos orbitales de los desechos y datos…
Procedimiento para determinar una información de posición transversal de un vehículo a motor en una calzada y vehículo a motor.
(13/03/2019) Procedimiento para determinar una información de posición transversal de un vehículo a motor sobre una calzada , caracterizado por que los datos que describen al menos una parte de la calzada son registrados con al menos un sensor de radar del vehículo a motor , a través de la evaluación en los datos de radar se detectan y localizan características del entorno que describen la ubicación de un límite de la calzada, en base a las mismas se determinan un curso de los límites de la calzada, de la calzada , y distancias laterales del vehículo a motor con respecto a los límites de la calzada, y la información de posición transversal se determina como aquella, o en función de las distancias laterales del vehículo a motor con respecto a los límites de la calzada, en donde como, al menos, un sensor de…
Método para determinar la temporización de la recepción de un mensaje de radio.
(13/03/2019) Método para determinar el tiempo de recepción por un receptor de radio de un mensaje AIS (Sistema de Identificación Automático) codificado en binario, enviado por un transmisor en forma de una primera señal que es una señal de radio modulada , por lo que el receptor recibe la primera señal utilizando una antena que da como resultado una segunda señal en forma de señal eléctrica analógica, dicha segunda señal es muestreada, dicho muestreo puede realizarse en cualquier orden en relación con cualquier desmodulación de la segunda señal, dicho muestreo se realiza utilizando un convertidor AD , dando como resultado una tercera señal almacenada digitalmente en forma de una señal muestreada, en donde el contenido de datos del mensaje se determina a partir de la tercera señal como una secuencia de bits de datos, dicha secuencia…
Radomo para un sensor de radar en un automóvil.
(22/11/2018) Radomo para un sensor de radar en un automóvil en donde la pared del radomo se compone de varias capas, en donde dos capas están hechas de plástico y como mínimo una capa de pintura aplicada sobre la cara exterior del radomo se compone de por lo menos una pintura, en donde entre las capa de plástico hay colocado como mínimo un dispositivo de acción inductiva o capacitiva el cual compensa por lo menos parcialmente la reflexión de la radiación electromagnética del sensor de radar provocada por la capa de pintura , en donde el como mínimo un dispositivo de acción inductiva o capacitiva está alimentado con corriente para…
Control de separación del vehículo.
(28/03/2018) Un método para determinar una distancia de seguridad (dsegura) entre un primer vehículo y un segundo vehículo que se mueve delante del primer vehículo, donde cada vehículo tiene un estado que comprende una posición (s1, s2), una velocidad (v1, v2) y una aceleración (a1, a2) del vehículo, donde el método comprende los pasos de:
- recopilar datos del sensor relativos a los estados de los vehículos , donde el estado de cada vehículo representa la posición, la velocidad y la aceleración de dicho vehículo,
- determinar, usando los datos del sensor y una descripción dependiente del tiempo del estado del segundo vehículo , un estado calculado…
Detección de tiempo atmosférico por radar para una turbina eólica.
(14/03/2018) Un sistema de radar para una turbina eólica que comprende:
- una primera unidad de radar y una unidad de control dispuestas para recibir una salida desde la unidad de radar, comprendiendo la unidad de control una unidad de procesamiento central configurada para:
- realizar una primera función de determinar al menos una propiedad de una aeronave detectada dentro de una zona en supervisión en los alrededores de la turbina eólica basándose en la salida de la primera unidad de radar, y controlar un dispositivo de alerta para generar una señal de alerta a la aeronave detectada basándose en la propiedad determinada; y
- realizar una segunda función de determinar al menos un parámetro de tiempo atmosférico predominante en los alrededores de la turbina eólica basándose…
Automóvil con sensor ajustable y/o calibrable, sensor y procedimiento para la supervisión del sensor.
(14/03/2018). Solicitante/s: AUDI AG. Inventor/es: MULLER, CHRISTIAN, POLLMER,JENS.
Automóvil , que comprende al menos un sensor ajustables y/o calibrable, que está montado en una posición de montaje fija dentro del automóvil , en el que está prevista una instalación de detección para la detección de una retirada temporal del sensor en el estado sin corriente fuera de la posición de montaje, caracterizado por que está prevista una instalación de control que indicia al menos una medida durante una retirada temporal detectada del sensor fuera de la posición de montaje durante la puesta en servicio del sensor.
PDF original: ES-2665901_T3.pdf
Procedimiento para el funcionamiento de un sensor de radar en un automóvil, sensor de radar y automóvil.
(09/11/2016). Solicitante/s: AUDI AG. Inventor/es: KHLIFI,RACHID.
Procedimiento para el funcionamiento de un sensor de radar utilizado para la percepción del entorno para un automóvil , en el que para al menos un trayecto recorrido por el automóvil se calculan datos de referencia que describen características estáticas perceptibles a través del sensor de radar , teniendo en cuenta datos de radar registrados a lo largo del trayecto y se registran dentro del sensor de radar , caracterizado por que en el caso de un recorrido nuevo de al menos una sección de un trayecto, para el que se han registrado datos de referencia, se realiza con gasto reducido la evaluación de datos de radar registrado actualmente teniendo en cuenta los datos de referencia.
PDF original: ES-2651339_T3.pdf
Combinar datos de múltiples señales de radar en un único visualizador de presentación panorámica (PPI).
(26/10/2016) Un procedimiento para combinar datos de múltiples señales de radar en un único visualizador de presentación panorámica (PPI), que comprende:
recibir, de un primer dispositivo de radar (102a) que tiene un primer alcance angular de visibilidad, primeros datos de señal de radar (130a) correspondientes al primer alcance angular de visibilidad;
recibir, de un segundo dispositivo de radar (102b) que tiene un segundo alcance angular de visibilidad, segundos datos de señal de radar (130b) correspondientes al segundo alcance angular de visibilidad caracterizado por
procesar compensaciones en al menos una parte de los segundos datos de señal de radar (130b) para formar segundos datos de señal de radar modificados (130b'), que son correlativos a los primeros datos de señal de radar (130a), aplicando un algoritmo de compensación de movimiento…
Sensor de radar para un vehículo automóvil, vehículo automóvil y procedimiento de comunicación.
(05/10/2016) Sensor de radar para un vehículo automóvil que comprende al menos una disposición de antenas para emitir y recibir señales de radar y un equipo de control concebido para controlar el funcionamiento de la disposición de antenas y para evaluar las señales de radar recibidas, en donde la disposición de antenas puede ser hecha funcionar también por el equipo de control para emitir y/o recibir mensajes en el marco de una comunicación de vehículo automóvil a vehículo automóvil, en donde la disposición de antenas presenta al menos una antena de emisión y al menos una antena de recepción , y en donde la antena de emisión puede ser activada en alternancia cíclica con la emisión de señales de radar para emitir mensajes, caracterizado…
Soporte de sensor para un sensor de distancia.
(07/09/2016). Solicitante/s: WABCO GMBH. Inventor/es: STENDER, AXEL, RISSE,RAINER, Ronnenberg,Udo, KAUFMANN,MICHAEL, STEPHAN,ARNE.
Soporte de sensor para un sensor de distancia , en el que el soporte de sensor presenta al menos:
una pieza de fijación para la colocación en un vehículo ,
una pieza de alojamiento colocada regulable en la pieza de fijación para la recepción del sensor de distancia ,
en el que la pieza de alojamiento es regulable en la pieza de fijación en al menos dos posiciones angulares diferentes, caracterizado por que
- la pieza de fijación es una carcasa , y
- la pieza de alojamiento es una tapa que cierra la carcasa , en el que el sensor de distancia está fijado en la tapa y está rodeado por la carcasa ,
en el que la tapa está girada en las dos posiciones angulares alrededor de 180º entre sí.
PDF original: ES-2604487_T3.pdf
Procedimiento para el funcionamiento de un sistema de asistencia al conductor de un vehículo automóvil y vehículo automóvil.
(20/07/2016). Solicitante/s: AUDI AG. Inventor/es: KHLIFI,RACHID.
Procedimiento para el funcionamiento de un sistema de asistencia al conductor de un vehículo automóvil , evaluándose datos de sensor de al menos un sensor de radar del vehículo automóvil dirigido al entorno del vehículo automóvil para determinar un recorrido de un límite de la carretera de una carretera recorrida por el vehículo automóvil , en el que en el caso de cumplir al menos un criterio de medidas el cual indica un peligro del vehículo automóvil , en particular de neumáticos y/o llantas, por la naturaleza del límite de la carretera, se introduce una medida para advertir al conductor y/o para reducir el peligro mediante una intervención en la marcha, caracterizado por que se utiliza un criterio de medidas que evalúa el recorrido del límite de la carretera en un plano vertical, comparándose un valor de la nitidez de los cantos, el cual describe la nitidez de cantos que aparecen en el recorrido, con un valor umbral de la nitidez.
PDF original: ES-2641586_T3.pdf
Procedimiento y dispositivo para el procesamiento de informaciones de colisión.
(23/03/2016) Procedimiento para el procesamiento de informaciones de colisión en un objeto volador , que presenta las etapas del procedimiento: detección de datos de radar sectorizados al menos en un cuadrante delantero derecho (Q2), en el que para un objeto que se encuentra en un sector se calculan al menos la distancia y la velocidad de aproximación, y procesamiento de una primera regla, de acuerdo con la cual se emite una información de instrucción, cuando un objeto se encuentra dentro de un primer horizonte de decisión, el objeto se aproxima al objeto volador y el objeto se encuentra en el cuadrante delantero derecho (Q2), en el que se procesa una segunda regla, de acuerdo con la cual…
Radar con agilidad de haz, en particular para la función de detectar y evitar obstáculos.
(21/01/2016) Dispositivo de radar que consiste en una antena que comprende al menos dos redes lineales de elementos radiantes y ortogonales entre sí, utilizándose una primera red para focalizar un haz de emisión en un primer plano y utilizándose una segunda red para focalizar un haz de recepción en un segundo plano, ortogonal al primer plano, caracterizado porque dicho dispositivo de radar comprende, además:
- un dispositivo de codificación configurado para, estando formada la primera red por dos subredes , asignar un código de emisión específico para cada subred para realizar una emisión con colores, obteniéndose…
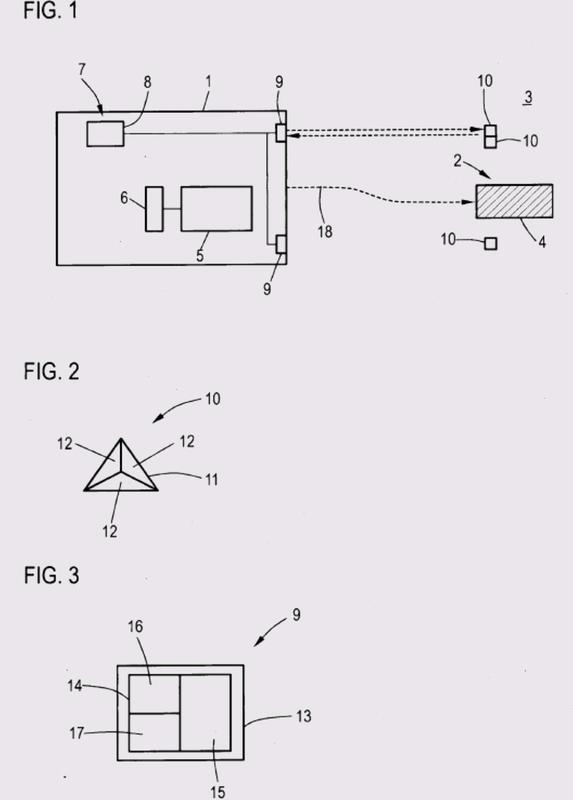
Procedimiento para operación de un sistema de asistencia al conductor de un automóvil para situar de manera óptima el automóvil respecto de un dispositivo de carga inalámbrico y a un automóvil.
(13/01/2016). Ver ilustración. Solicitante/s: AUDI AG. Inventor/es: KHLIFI,RACHID.
Procedimiento para operar un sistema de asistencia al conductor de un automóvil para situar de manera óptima el automóvil respecto de un dispositivo de carga inalámbrico para un acumulador de energía eléctrica del automóvil , caracterizado por que por medio de la valoración de los datos de sensor de como minimo un sensor de radar se determina una posición de como minimo un marcador de radar que refleja como fuente puntual , que está situado en relación geométrica fija respecto del dispositivo de carga y por tanto se determina una posición relativa del automóvil respecto del dispositivo de carga , se determina una trayectoria que conduce a una posición final óptima predeterminada del automóvil con relación al dispositivo de carga , y se entrega a un conductor especialmente en forma de instrucciones de marcha y/o se realiza por actuaciones de marcha automáticas.
PDF original: ES-2640628_T9.pdf
PDF original: ES-2640628_T3.pdf
Procedimiento para advertir al conductor de un vehículo motorizado de la generación de una situación de peligro como consecuencia de una deriva no intencional a un carril de tránsito en sentido contrario.
(13/05/2015) Procedimiento para advertir al conductor de un vehículo motorizado de la generación de una situación de peligro como consecuencia de una deriva no intencional en sentido de o a un carril de tránsito en sentido contrario, caracterizado por que
- se determina un corredor virtual de circulación dirigido en el sentido de marcha del vehículo motorizado propio,
- usando en particular un sistema de captación, particularmente óptica, se determina una señalización horizontal de calzada que separa el carril propio del carril de tránsito en sentido contrario,
- se determina la posición relativa del vehículo propio respecto de la señalización horizontal de calzada,
- usando…
Procedimiento para la conducción longitudinal de un vehículo comprendiendo un sistema adaptativo de conducción longitudinal (sistema ACC).
(25/02/2015) Procedimiento para la conducción longitudinal automática de un vehículo motorizado, incluyendo un sistema de conducción longitudinal adaptativa (sistema ACC), siendo obtenidas informaciones por parte de un dispositivo de control del sistema de conducción longitudinal referentes a las distancias a múltiples vehículos motorizados precedentes y referentes a las velocidades respectivas de dichos vehículos motorizados y la respectiva aceleración de dichos vehículos motorizados, produciendo la conducción longitudinal del vehículo motorizado en función de las informaciones obtenidas y de las aceleraciones obtenidas.
Radomo para un sensor de radar en un vehículo automóvil.
(25/02/2015) Radomo para un sensor de radar en un vehículo automóvil, en el que al menos una de sus paredes está provista, en una primera superficie, de al menos una primera estructura tridimensional, en el que una segunda superficie opuesta a la primera superficie presenta al menos una segunda estructura adaptada a la al menos una primera estructura de tal manera que el camino óptico para ondas electromagnéticas en sitios de la pared tanto dotados de estructuras como carentes de estructuras sea sustancialmente idéntico, caracterizado por que la al menos una primera estructura es un bombeado alargado y la al menos una segunda estructura es una concavidad alargada.
Dispositivo de radar aerotransportado multifunción de banda ancha con una amplia cobertura angular que permite la detección y el seguimiento.
(11/02/2015) Dispositivo de radar aerotransportado que permite la detección de blancos para la implementación de una función de detección y de evitación de obstáculos, que comprende una pluralidad de módulos de antenas, al menos un módulo de antena que comprende un módulo de emisión, y al menos un módulo de antena que comprende un módulo de recepción, estando los módulos de antenas fijos con respecto a la aeronave dispuestos en la superficie de la aeronave , caracterizado porque el dispositivo de radar funciona en modos activo y pasivo, formando los módulos de antenas unos haces de emisión y de recepción con una anchura y unas características adaptadas a la dirección considerada.
Sistema para evitar la colisión entre una aeronave y un obstáculo.
(22/10/2014) Un aparato para detectar y advertir a una aeronave acerca de un obstáculo aéreo, que comprende:
una unidad de campo situada, en uso, en la proximidad de un obstáculo aéreo para advertir a una aeronave del obstáculo aéreo, incluyendo dicha unidad de campo:
un sistema de radar para determinar si la aeronave está dentro del área de cobertura del radar en la proximidad del obstáculo aéreo;
estando el aparato caracterizado por:
el área de cobertura del radar, en uso, incluyendo una primera zona de advertencia y una segunda zona de advertencia;
incluyendo adicionalmente la unidad de campo una unidad central de procesamiento para identificar cuando la aeronave está dentro de la primera zona de advertencia y la segunda zona de advertencia, estando configurada la unidad central de procesamiento para procesar información…
Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor.
(27/08/2014) Procedimiento para la detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor con velocidades a partir de 50 km/h, comprendiendo la disposición de medición con ultrasonido, que comprende al menos un sensor ( 3a, 3b, 3c, 3d) de ultrasonido, como datos de partida al menos el radio, que describe la separación del objeto más próximo situado en el campo de medición de un sensor (3a, 3b, 3c, 3d) utilizado para la medición del radio, caracterizado porque se determina una perturbación del proceso de medición en función de al menos una comparación del radio con un radio mínimo dependiente de la velocidad, aumentando…
Sistema acústico y con soporte táctil de información a los ocupantes del vehículo.
(20/08/2014) Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos blindados , mediante los sensores disponibles en el vehículo correspondiente, en el que los datos grabados por los sensores se le comunican acústicamente al conductor y/o comandante del vehículo correspondiente, simulándose el ruido natural correspondientes antes de que ocurra realmente un evento, caracterizado porque el ruido simulado se genera por un simulador de ruido en un rango de frecuencia inferior respecto al ruido natural correspondiente.
Unidad de campo de radar para sistema que evita la colisión entre una aeronave y un obstáculo.
(04/06/2014) Una unidad de campo para detectar y avisar a una aeronave acerca de un obstáculo, comprendiendo la unidad de campo una unidad central de procesamiento y un sistema de radar para la detección con radar de una aeronave en un área de cobertura de radar:
- comprendiendo el sistema de radar:
- una antena de radar que comprende una pluralidad de paneles de antena , comprendiendo cada uno una pluralidad de elementos de antena radiantes , estando dispuestos los paneles de antena como los lados de un octógono; y
- componentes electrónicos de radar en comunicación con la antena de radar, comprendiendo los componentes electrónicos…
Sistema y método para la prevención de colisiones utilizando una posición interna dentro de una formación cerrada.
(12/02/2014) Un sistema para la prevención de colisiones en vuelo en formación, comprendiendo el sistema: medios de transpondedor de enlace de datos, en una primera aeronave, para la recepción de datos de difusión que comprende información de posición de una segunda aeronave; y
medios informáticos TCAS del sistema de prevención de colisiones y alerta de tráfico, en la primera aeronave, para la comunicación con dichos medios de transpondedor de enlace de datos; y para el procesamiento de los datos de difusión recibidos para determinar la posición relativa de la aeronave de la primera y segunda aeronave;
caracterizado…
Métodos y aparato para proporcionar estimación de altitud de blanco en un sistema de radar bidimensional.
(20/11/2013) Un método, incluyendo:
seguir un contacto usando un sensor en un sistema de radar bidimensional para determinar una posiciónrelativa y una velocidad relativa del contacto con respecto al sensor;
determinar un tiempo estimado al punto de aproximación más cercano, TCPA, para el contacto usando laposición relativa y la velocidad relativa;
determinar un punto de aproximación más cercano estimado, CPA, para el contacto a partir del TCPAestimado;
determinar una distancia de línea de visión transversal estimada en el CPA estimado en base al TCPA estimado ylos datos de seguimiento de posición relativa y velocidad relativa; y
estimar una altitud para el contacto a partir del punto de aproximación más cercano estimado, CPA, y la…
{kind=link}