Sistema para evitar colisiones.
Un método para evitar una colisión entre un vehículo anfitrión (2) y un vehículo intruso (4) que comprende los pasosde:
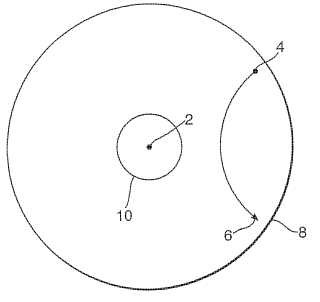
- detectar un vehículo intruso dentro de una región predeterminada en torno al 5 vehículo anfitrión y recoger datossobre la posición del vehículo intruso en función del tiempo;
- predecir una trayectoria proyectada (6) del vehículo intruso usando una extrapolación cuadrática de los datosde posición del vehículo intruso;
- asignar una región de protección (10) en torno al vehículo anfitrión;
- determinar si la trayectoria proyectada del vehículo intruso interceptará la región de protección del vehículoanfitrión y determinar con ello si habrá un conflicto, y,
- al determinarse que habrá un conflicto entre el vehículo anfitrión y el vehículo intruso, calcular una alteracióndel rumbo del vehículo anfitrión de modo que la trayectoria proyectada del vehículo intruso no intercepte laregión de protección del vehículo anfitrión.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2005/050103.
Solicitante: BAE SYSTEMS PLC.
Nacionalidad solicitante: Reino Unido.
Dirección: 6 CARLTON GARDENS LONDON SW1Y 5AD REINO UNIDO.
Inventor/es: ANSELL,DARREN WILLIAM, KIRKHAM,PETER MARK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/72 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para el seguimiento en dos dimensiones, p. ej. combinación de seguimiento en ángulo y en distancia, radar de detección y seguimiento automático "track-while-scan".
- G01S13/93 G01S 13/00 […] › para anticolisión.
- G08G5/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 5/00 Sistemas del control del tráfico aéreo. › Sistemas anticolisión.
PDF original: ES-2395826_T3.pdf
Fragmento de la descripción:
Sistema para evitar colisiones La presente invención se refiere a un método y a un sistema para evitar colisiones, y en particular pero no exclusivamente, a un sistema para evitar colisiones para uso en aeronaves.
Para la seguridad de vuelo, las aeronaves deben evitar a otras aeronaves dentro del espacio aéreo circundante y la evitación de colisiones es una tarea importante para los pilotos. Los vehículos aéreos no tripulados (UAV, del inglés “Unmanned Aerial Vehicles”) requieren por otro lado un sistema para permitirles detectar y evitar a otras aeronaves en el espacio aéreo circundante. El potencial completo de los vehículos UAV no puede ser realizado hasta que hayan probado su capacidad para hacer esto de forma efectiva y fiable y para operar así de forma segura en el espacio aéreo no restringido. Las autoridades de aviación no darán aprobación para que vehículos UAV entren con vuelos rutinarios en espacio aéreo comercial salvo que los vehículos UAV satisfagan el requisito de evitar completamente colisiones con otras aeronaves.
Actualmente, hay sistemas basados en transpondedores para uso en vehículos UAV pero éstos sólo ayudan a evitar aeronaves cooperantes, es decir aquellas aeronaves que usan transpondedores. Las aeronaves amistosas podrían emitir una señal de identificación amigo/enemigo (IFF, del inglés “Identification Friend or Foe”) que puede incluir datos cinemáticos de aeronave. Actualmente no hay ningún sistema que ayude a vehículos UAV a evitar a aeronaves sin transpondedores (por ejemplo globos de aire caliente o misiles) o aeronaves con transpondedores no operativos, y por lo tanto no hay ningún sistema que permita que los vehículos UAV vuelen sin ayuda en el espacio aéreo no restringido.
El documento US 2002/0032528 A1 da a conocer un método para determinar trayectorias en conflicto entre vehículos móviles. El documento GB 2 136 097 A da a conocer el uso de extrapolación cuadrática en un sistema de control de interceptación con seguimiento de objetivo.
De acuerdo con ello, se proporciona un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso que comprende los pasos de: detectar un vehículo intruso dentro de una región predeterminada en torno al vehículo anfitrión y recoger datos sobre la posición del vehículo intruso en función del tiempo; predecir una trayectoria proyectada del vehículo intruso usando una extrapolación cuadrática de los datos de posición del vehículo intruso; asignar una región de protección en torno al vehículo anfitrión, y determinar si la trayectoria proyectada del vehículo intruso interceptará la región de protección del vehículo anfitrión y determinar con ello si habrá un conflicto.
Un método así para evitar colisiones permite al vehículo anfitrión detectar otras aeronaves dentro del espacio aéreo circundante y determinar si existe un posible conflicto. Se dice que existe un conflicto entre un vehículo anfitrión y un vehículo intruso si la separación mínima es menor que un límite de seguridad especificado para impedir, por ejemplo, que el chorro de motor de una aeronave afecte a la otra aeronave. La designación de una región de protección en torno al vehículo anfitrión permite establecer un límite de seguridad en la forma de una distancia de desviación deseada entre los vehículos, en que la distancia de desviación toma en consideración características de cada aeronave, tales como el tamaño y el alcance probable de sistemas de armamento de la aeronave intrusa.
El método comprende además el paso de calcular, al determinarse la existencia de conflicto entre el vehículo anfitrión y el vehículo intruso, una alteración del rumbo del vehículo anfitrión de modo que la trayectoria proyectada del vehículo intruso no interceptará la región de protección del vehículo anfitrión. Alternativamente, el método comprende además el paso de, al determinarse que habrá un conflicto entre el vehículo anfitrión y el vehículo intruso, asignar una zona de protección en torno al vehículo intruso, y calcular una alteración del rumbo del vehículo anfitrión de modo que el vehículo anfitrión no interceptará la zona de protección del vehículo intruso.
Una vez que se ha determinado la existencia de conflicto, el vehículo anfitrión debe alterar su rumbo si quiere evitar al vehículo intruso. La alteración del rumbo del vehículo anfitrión de modo que la trayectoria proyectada del vehículo intruso no intercepte la región de protección del vehículo anfitrión asegura que el vehículo anfitrión evita al vehículo intruso con el margen de seguridad requerido. El cálculo de una alteración de rumbo del vehículo anfitrión de modo que el vehículo anfitrión no interceptará la zona de protección del vehículo intruso requiere una capacidad de procesamiento menor que el cálculo de una alteración de rumbo de modo que la trayectoria proyectada del vehículo intruso no interceptará la región de protección del vehículo anfitrión.
La alteración de rumbo del vehículo anfitrión puede ser proporcionada de salida como un vector de resolución a un medio de visualización o a un dispositivo de dirección automática.
La salida de un vector de resolución a un medio de visualización da a un operador una indicación visual de la acción remediadora requerida para evitar a la aeronave intrusa. La salida del vector a un dispositivo de dirección automática permite que el dispositivo de dirección automática actúe sobre la base de información proporcionada por el sistema para evitar colisiones sin requerir intervención de un operador.
Ventajosamente, el cálculo de una alteración de rumbo del vehículo anfitrión toma en consideración características del vehículo anfitrión, y cualquier alteración de rumbo que no cumpla con estas características es descartada.
Los vehículos están limitados en cuanto a maniobras posibles por su capacidad, por ejemplo, de sostener giros bruscos. Es por lo tanto preferible que estas limitaciones sean tomadas en consideración y que sólo se prevea una alteración de rumbo que sea adecuada y/o practicable. Cualquier alteración de rumbo que no cumpla con las normas estándar internacionales del aire pueden ser descartadas. El requisito de evitar el terreno se toma también en consideración cuando se selecciona una alteración de rumbo.
El método puede comprender además, en el caso de que se haya determinado un conflicto, el paso de calcular el instante crítico en el que la trayectoria proyectada del vehículo intruso está mas cerca del vehículo anfitrión.
Puede determinarse entonces que existe conflicto sólo cuando el instante crítico calculado es positivo, es decir cuando el instante crítico está en el futuro. Esto evita una determinación innecesaria de la existencia de conflicto cuando el vehículo anfitrión se está alejando del vehículo intruso.
El método puede comprender además el paso de seleccionar una alteración de rumbo de modo que es minimizado al menos uno de entre el tiempo empleado, el gasto de combustible o el cambio de dirección del vehículo anfitrión resultantes de la alteración de rumbo.
Al escoger el medio de alteración de rumbo menos costoso, debe estar disponible más capacidad de maniobra para el vehículo anfitrión para evitar nuevas situaciones, tales como que el vehículo intruso cambie de rumbo o que se detecten intrusos adicionales.
Al detectarse un vehículo intruso dentro de la región de protección del vehículo anfitrión, es preferible seleccionar una alteración de rumbo de emergencia.
Si es detectado un vehículo intruso dentro de la región de protección del vehículo anfitrión, se considera que está demasiado cerca del vehículo anfitrión en cuanto a seguridad. El vehículo anfitrión puede por lo tanto seguir un rumbo de emergencia, con el fin de eliminar el vehículo intruso de la región de protección del vehículo anfitrión, y esto puede efectuarse mediante un dispositivo de dirección automática, o piloto automático.
El método puede comprender además el paso de almacenar datos de posición de múltiples vehículos intrusos. Esto permite que todos los conflictos de intrusos dentro de la región predeterminada en torno al vehículo anfitrión sean evaluados y que las limitaciones de maniobra sean calculadas para todos los vehículos intrusos para los que el vehículo anfitrión tiene datos, evitando con ello el cálculo de una alteración de rumbo del vehículo anfitrión que evitaría a un vehículo intruso actualmente en conflicto con el vehículo anfitrión pero que pondría el vehículo anfitrión en conflicto con otro vehículo intruso.
De acuerdo con otro aspecto... [Seguir leyendo]
Reivindicaciones:
1. Un método para evitar una colisión entre un vehículo anfitrión (2) y un vehículo intruso (4) que comprende los pasos
2. Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso según la reivindicación 1, que comprende además los pasos de:
de:
detectar un vehículo intruso dentro de una región predeterminada en torno al vehículo anfitrión y recoger datos sobre la posición del vehículo intruso en función del tiempo;
predecir una trayectoria proyectada (6) del vehículo intruso usando una extrapolación cuadrática de los datos de posición del vehículo intruso;
asignar una región de protección (10) en torno al vehículo anfitrión;
determinar si la trayectoria proyectada del vehículo intruso interceptará la región de protección del vehículo anfitrión y determinar con ello si habrá un conflicto, y,
al determinarse que habrá un conflicto entre el vehículo anfitrión y el vehículo intruso, calcular una alteración del rumbo del vehículo anfitrión de modo que la trayectoria proyectada del vehículo intruso no intercepte la región de protección del vehículo anfitrión.
al determinarse que habrá un conflicto entre el vehículo anfitrión y el vehículo intruso, asignar una zona de protección en torno al vehículo intruso, y
calcular una alteración del rumbo del vehículo anfitrión de modo que el vehículo anfitrión no intercepte la zona de protección del vehículo intruso.
3. Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso según la reivindicación 2, que comprende además el paso de:
proporcionar de salida la alteración de rumbo como un vector de resolución a un medio de visualización o a un dispositivo de dirección automática.
4. Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso según cualquiera de las reivindicaciones 1 a 3, en que el cálculo de una alteración de rumbo del vehículo anfitrión toma en consideración características del vehículo anfitrión, y cualquier alteración de rumbo que no cumpla con estas características es descartada.
5. Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso según cualquier reivindicación precedente, que comprende además el paso de:
en el caso de que se haya determinado un conflicto, calcular el instante en el que la trayectoria proyectada del vehículo intruso está mas cerca del vehículo anfitrión.
6. Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso según cualquier reivindicación precedente, que comprende además el paso de:
seleccionar una alteración de rumbo de modo que es minimizado al menos uno de entre el tiempo empleado, el gasto de combustible o el cambio de dirección del vehículo anfitrión resultantes de la alteración de rumbo.
7. Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso según cualquier reivindicación precedente, que comprende además el paso de:
al detectarse un vehículo intruso dentro de la región de protección del vehículo anfitrión, seleccionar una alteración de rumbo de emergencia.
8. Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso según cualquier reivindicación precedente para detectar múltiples vehículos intrusos, que comprende además el paso de almacenar los datos de posición de los múltiples vehículos intrusos.
9. Un método para evitar una colisión entre un vehículo anfitrión y un vehículo intruso según la reivindicación 8, que comprende además el paso de:
calcular una alteración de rumbo del vehículo anfitrión que evitará el conflicto con todos los vehículos intrusos.
10. Un sistema para evitar colisiones (14) para un vehículo anfitrión, que comprende:
un medio de detección (12) preparado para detectar un vehículo intruso dentro de una región predeterminada en torno al vehículo anfitrión y recoger datos sobre la posición del vehículo intruso en función del tiempo;
un medio (18) para predecir una trayectoria proyectada del vehículo intruso usando una extrapolación cuadrática de los datos de posición del vehículo intruso;
un medio (20) para determinar una región de protección en torno al vehículo anfitrión,
un medio de determinación de conflictos (22) preparado para determinar si la trayectoria proyectada del vehículo intruso interceptará la región de protección del vehículo anfitrión y con ello determinar si habrá un conflicto, y
un medio de resolución de conflictos (24) preparado para calcular, al determinarse que habrá un conflicto entre el vehículo anfitrión y el vehículo intruso, una alteración del rumbo del vehículo anfitrión de modo que la trayectoria proyectada del vehículo intruso no intercepte la región de protección del vehículo anfitrión.
11. Un sistema para evitar colisiones según la reivindicación 10, que comprende además:
un medio de resolución de conflictos preparado para asignar, al determinarse que habrá un conflicto entre el vehículo anfitrión y el vehículo intruso, una zona de protección en torno al vehículo intruso, y para calcular una alteración del rumbo del vehículo anfitrión de modo que el vehículo anfitrión no intercepte la zona de protección del vehículo intruso.
12. Un sistema para evitar colisiones según la reivindicación 10 u 11, en que el medio de resolución de conflictos toma en consideración características del vehículo anfitrión, y durante el uso está preparado para descartar cualquier alteración de rumbo que no cumpla con estas características.
13. Un sistema para evitar colisiones según cualquiera de las reivindicaciones 10 a 12, que comprende además:
un medio preparado para, en el caso de que se haya determinado un conflicto, calcular el instante en el que la trayectoria proyectada del vehículo intruso está mas cerca del vehículo anfitrión.
14. Un sistema para evitar colisiones según cualquiera de las reivindicaciones 10 a 13, en que el medio de resolución de conflictos está preparado para seleccionar una alteración de rumbo de modo que es minimizado al menos uno de entre el tiempo empleado, el gasto de combustible o el cambio de dirección del vehículo anfitrión resultantes de la alteración de rumbo.
15. Un sistema para evitar colisiones según cualquiera de las reivindicaciones 10 a 14, en que el medio de resolución de conflictos está preparado para seleccionar, al detectarse un vehículo intruso dentro de la región de protección del vehículo anfitrión, una alteración de rumbo de emergencia.
16. Un sistema para evitar colisiones según cualquiera de las reivindicaciones 10 a 15 para uso en la detección de múltiples vehículos intrusos, que comprende además un medio para almacenar los datos de posición de los múltiples vehículos intrusos.
17. Un sistema para evitar colisiones según la reivindicación 16, preparado para calcular una alteración de rumbo del vehículo anfitrión que evitará el conflicto con todos los vehículos intrusos.
18. Un vehículo que tiene un sistema para evitar colisiones según cualquiera de las reivindicaciones 10 a 17.
Patentes similares o relacionadas:
SISTEMA DE MICRO CAMARAS CON SENSORES DE MOVIMIENTO PARA AYUDA A LA CONDUCCIÓN, del 21 de Enero de 2020, de PALAZZOLO, Umberto: 1. Sistema de micro cámaras con sensores de movimiento para ayuda a la conducción, caracterizado esencialmente, porque está formado por micro cámaras […]
Mejoras aportadas y relativas a los datos de rumbos de navegación y/o de velocidad de un buque, del 15 de Octubre de 2019, de BAE SYSTEMS PLC: Un método para determinar una velocidad de un buque, en donde el buque es una embarcación , ubicada en una zona litoral, que comprende las etapas de: detectar objetos […]
Dispositivo para un vehículo, del 11 de Septiembre de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para medir un posible espacio de estacionamiento (P) mediante un vehículo que pasa al espacio de estacionamiento (P), donde mediante un […]
Aparato de tratamiento de señales para generar un mapa de Alcance-Doppler, del 28 de Agosto de 2019, de AptCore Ltd: Aparato de tratamiento de señales para generar un mapa de alcance-Doppler , comprendiendo el aparato: una unidad de cálculo de transformada […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]
SISTEMA DE CONDUCCIÓN ASISTIDA BASADO EN UNA RED DE COMUNICACIÓN DE ONDA MILIMÉTRICA Y DETECCIÓN DE OBJETOS POR TÉCNICAS RADAR, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración de componentes en vehículos y un método de operación de los mismos que posibilita al conductor […]
MÉTODO DE DETECCIÓN Y GESTIÓN DE FATIGA MENTAL DURANTE LA CONDUCCIÓN BASADO EN ANALISIS DE MIRADA Y DETECCION DE OBJETOS, del 27 de Junio de 2019, de PARDO GUZMAN, Dino Alejandro: Un método y detección y gestión de fatiga mental para aumentar la seguridad y confort de los conductores de tracto camiones, basado en análisis […]
Sistema satelital autónomo de evitación de desechos orbitales, del 15 de Mayo de 2019, de Briskman, Robert: Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , […]