Comprobación de validez de información de posición de un vehículo transmitida a través de un enlace de datos sincronizado en el tiempo.
Un procedimiento de validación de datos de posición en aplicaciones de vigilancia de vehículos,
en el que losvehículos (3, 5, 5') transmiten los datos de posición que indican su propia posición a los vehículos circundantes (3, 5,5'), comprendiendo dicho procedimiento las etapas de:
recibir (S1), en una unidad de recepción (3), una primera señal (13; 13', 13") que transporta datos deposición que indican una supuesta posición (PADS-B (5); PADS-B(5') , PADS-B (15")) de un vehículo, transmitidadesde una fuente de radio (5; 5', 15") a través de un enlace de datos;
estimar (S2) la distancia (dEST(5), dEST(5'), dEST(15")) entre la unidad de recepción (3) y la fuente de radio (5; 5',15") en base al tiempo de vuelo, TOF, y la velocidad de propagación de la señal recibida (13; 13', 13"), ydeterminar (S3) un valor de desviación que indica la diferencia entre una distancia a la posición (PADS-B(5);PADS-B(5'), PADS-B(15")) de un vehículo de acuerdo con los datos de posición recibidos y la distancia estimada(dEST(5), dEST(5'), dEST(15")) a la fuente de radio (5; 5', 15"),
caracterizado porque dicho enlace de datos es un enlace de datos a través del cual se inician lastransmisiones de señales portadoras de datos de posición que indican presuntas posiciones de losvehículos en los puntos de transmisión dados en el tiempo (14) que son conocidos por todos los usuariosde dicho enlace de datos, y porque dicho TOF se determina en base al tiempo (Δt) transcurrido desde elpunto de transmisión en el tiempo (14) de dicha primera señal al momento de recepción (16) de al menosuna primera parte de dicha primera señal.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08158501.
Solicitante: SAAB AB.
Nacionalidad solicitante: Suecia.
Dirección: 581 88 LINKÖPING SUECIA.
Inventor/es: ANDERSSON,SVANTE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/76 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › en los que se transmiten señales de tipo pulso.
- G01S13/93 G01S 13/00 […] › para anticolisión.
- G01S5/00 G01S […] › Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia.
PDF original: ES-2438599_T3.pdf
Fragmento de la descripción:
Comprobación de validez de información de posición de un vehículo transmitida a través de un enlace de datos sincronizado en el tiempo
Campo técnico
La presente invención se refiere al campo de la vigilancia del tráfico, y más particularmente a un procedimiento para la validación de los datos de posición que supuestamente indican la posición de un vehículo recibidos a través de un enlace de datos sincronizado en el tiempo.
Antecedentes de la técnica La vigilancia del tráfico aéreo hoy en día es gestionada por el control del tráfico aéreo (ATC) que utiliza un radar primario y secundario. Los sistemas ATC actualmente en desarrollo utilizan otras o técnicas complementarias en la vigilancia de tráfico aéreo. Uno de estos sistemas se llama radiodifusión-vigilancia dependiente automática (ADS-B) , que, en una escala de tiempo prolongada, se espera que reemplace gradualmente a los actuales sistemas como una fuente de información para el ATC.
La idea básica del sistema ADS-B es que todas las aeronaves emitan su propio vector de estado, que comprende la posición y la información de estado, a todas las aeronaves y estaciones terrestres cercanas. Así, cada aeronave tiene una visión completa del tráfico circundante y del tráfico cercano a una estación terrestre se puede supervisar en tierra.
Se confía en el sistema ADS-B y su capacidad para proporcionar de forma automática a cada aeronave con la información relativa al tráfico que le rodea para la funcionalidad, tal como la provisión de separación automática o semiautomática y para evitar colisiones. Estas funciones son especialmente importantes en el control de vuelo de vehículos aéreos no tripulados (UAVs) , pero también pueden ser importantes como una característica de precaución en las aeronaves tripuladas convencionales.
El principio del concepto ADS-B es el enlace de datos que permite la funcionalidad deseada. Actualmente hay tres tipos diferentes de enlaces de datos en estudio; Modo S ES, VDL Modo 4 y UAT.
El Modo S ES es una extensión del sistema de radar de vigilancia secundario del modo convencional S. El VDL Modo 4 es un estándar desarrollado recientemente para un transpondedor de enlace de datos compatible con los requisitos del ADS-B. El UAT sólo se considera para la aviación general en Estados Unidos.
Desafortunadamente, los sistemas ADS-B de hoy en día sufren de un inconveniente. La información de posición recibida desde el tráfico aéreo circundante tiene que ser de confianza para ser correcta. Esto es tanto un problema de confianza y la seguridad, la confianza en el sentido de que si el sistema transmisor emite una posición errónea podría causar una situación peligrosa, y la seguridad en el sentido de que el sistema se vuelve propenso a un uso malicioso mediante la emisión de informes de posición falsos.
Por ejemplo, si un mensaje de ADS-B indica una posición errónea de la aeronave desde la que se transmite, las decisiones tomadas en base a ese mensaje ADS-B pueden tener consecuencias devastadoras. Un operador de un sistema ATC basado en datos ADS-B o un piloto/piloto automático de una aeronave que utiliza un sistema de vigilancia de aeronaves con base ADS-B, puede ser engañado para ordenar/controlar una aeronave acercándola en lugar de alejarla de la aeronave que transmite el mensaje ADS-B erróneo.
El documento US 7 116 266 divulga un sistema TCAS capaz de realizar una comprobación de integridad de la posición notificada por otra aeronave. La comprobación de integridad comprende las etapas de interrogar a un transpondedor de la aeronave a bordo de la otra aeronave que incluye una solicitud de los datos de vigilancia mejorados que incluye la posición de la segunda aeronave, recibiendo una respuesta a la petición de interrogatorio, calcular la posición de la segunda aeronave en base al tiempo de respuesta de un mensaje y el rumbo, comparar la posición calculada con la posición recibida, y determinar la integridad de la posición recibida.
Sumario Es un objeto de la presente invención proporcionar un sistema de vigilancia del vehículo que es menos propenso a errores y menos sensible a un uso malintencionado.
Este objeto se consigue mediante un procedimiento para la validación de los datos de posición en aplicaciones de vigilancia del vehículo en el que los vehículos transmiten datos de posición que indican su propia posición a los vehículos de los alrededores. El procedimiento comprende las etapas de:
recibir, en una unidad de recepción, una primera señal que lleva datos de posición que indican una supuesta posición de un vehículo, transmitida desde una fuente de radio a través de un enlace de datos;
estimar la distancia entre la unidad receptora y la fuente de radio en base al tiempo de vuelo, TOF, y la
velocidad de propagación de la señal recibida, y
determinar un valor de desviación que indica la diferencia entre una distancia a la posición de un vehículo de acuerdo con los datos de posición recibidos y la distancia estimada a la fuente de radio.
El enlace de datos es un enlace de datos a través del cual se inician las transmisiones de señales portadoras de datos de posición que indica presuntas posiciones de los vehículos en los puntos de transmisión dados en el tiempo que son conocidos por todos los usuarios de dicho enlace de datos, y el TOF se determina basándose en el tiempo transcurrido desde el punto de transmisión en el tiempo de dicha primera señal en el momento de recepción de al menos una primera parte de dicha primera señal.
Mediante la estimación de la distancia a una fuente de radio que transmite datos posicionales relativos a una supuesta posición de un vehículo, y la determinación de un valor de desviación que es indicativa de la diferencia entre la distancia a la posición de un vehículo de acuerdo con los datos de posición recibidos y la distancia estimada a la fuente de radio, el procedimiento anterior proporciona una manera de determinar si la fuente de radio realmente se encuentra en la posición dada por los datos de posición que transmite.
Dado que el procedimiento se utiliza en un sistema de vigilancia de vehículos autonotificado, lo que significa que cada vehículo transmite datos de posición que indican su posición, un desajuste entre la distancia a la posición notificada y la distancia estimada a la fuente de radio indica que algo no está bien y que no se puede confiar en los datos de posición recibidos de manera indiscriminada.
Los criterios de la conexión de radio sobre la cual se reciben los datos de posición de acuerdo con el procedimiento son cumplidos por ejemplo por el enlace de radio basado en STDMA utilizado en los sistemas ADS-B VDL en Modo 4. El procedimiento, por tanto, se puede utilizar para validar los datos de posición que figuran en mensajes de VDL Modo 4 emitidos por los vehículos equipados con transpondedores VDL Modo 4. Esta función mejora enormemente la criticidad de los datos de posición VDL Modo 4 en las aplicaciones de vigilancia del vehículo y permite el uso de los datos en los sistemas de vigilancia del vehículo de seguridad crítica.
De acuerdo con un aspecto de la invención, el procedimiento se utiliza para descartar los datos de posición recibidos que se encuentran poco fiables. Cuando se utiliza para ese propósito, por ejemplo en un sistema de vigilancia de aeronaves basado en la aeronave o en un sistema ATC basado en tierra, el procedimiento propuesto reduce el riesgo de tomar decisiones sobre la navegación en base a información incorrecta de tráfico que le rodea.
El objeto se consigue también mediante un sistema de vigilancia de vehículos para aplicaciones de vigilancia del vehículo en el que los vehículos transmiten datos de posición que indican su propia posición a los vehículos de los alrededores. El sistema de vigilancia del vehículo comprende:
medios de recepción adaptados para recibir una primera señal que lleva datos de posición que indica una supuesta posición de un vehículo, transmitida desde una fuente de radio a través de un enlace de datos;
medios de estimación de distancia adaptados para estimar la distancia a la fuente de radio en base al tiempo de vuelo, TOF, y la velocidad de propagación de la señal recibida, y
medios de comparación adaptados para determinar un valor de desviación que indica la diferencia entre una distancia a la posición de un vehículo de acuerdo con los datos de posición recibidos y la distancia estimada a la fuente de radio.
El enlace de datos es un enlace de datos a través del cual se inician las transmisiones de señales portadoras de datos de posición que indican presuntas posiciones de vehículos... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de validación de datos de posición en aplicaciones de vigilancia de vehículos, en el que los vehículos (3, 5, 5') transmiten los datos de posición que indican su propia posición a los vehículos circundantes (3, 5, 5') , comprendiendo dicho procedimiento las etapas de:
recibir (S1) , en una unidad de recepción (3) , una primera señal (13; 13', 13") que transporta datos de posición que indican una supuesta posición (PADS-B (5) ;PADS-B (5') , PADS-B (15") ) de un vehículo, transmitida desde una fuente de radio (5; 5', 15") a través de un enlace de datos;
estimar (S2) la distancia (dEST (5) , dEST (5') , dEST (15") ) entre la unidad de recepción (3) y la fuente de radio (5; 5', 15") en base al tiempo de vuelo, TOF, y la velocidad de propagación de la señal recibida (13; 13', 13") , y
determinar (S3) un valor de desviación que indica la diferencia entre una distancia a la posición (PADS-B (5) ; PADS-B (5') , PADS-B (15") ) de un vehículo de acuerdo con los datos de posición recibidos y la distancia estimada (dEST (5) , dEST (5') , dEST (15") ) a la fuente de radio (5; 5', 15") ,
caracterizado porque dicho enlace de datos es un enlace de datos a través del cual se inician las transmisiones de señales portadoras de datos de posición que indican presuntas posiciones de los vehículos en los puntos de transmisión dados en el tiempo (14) que son conocidos por todos los usuarios de dicho enlace de datos, y porque dicho TOF se determina en base al tiempo (Δt) transcurrido desde el punto de transmisión en el tiempo (14) de dicha primera señal al momento de recepción (16) de al menos una primera parte de dicha primera señal.
2. Procedimiento de acuerdo con la reivindicación 1, en el que dicho valor de la desviación se utiliza como un indicador de la fiabilidad de los datos de posición recibidos.
3. Procedimiento de acuerdo con la reivindicación 1 ó 2, en el que la unidad de recepción (3) es una aeronave (3) o un barco que es gobernado en base a los datos de posición recibidos de las aeronaves (5) o barcos cercanos, comprendiendo el procedimiento además la etapa de:
descartar los datos de posición recibidos si dicho valor de desviación supera un valor umbral predeterminado, de modo que las decisiones de navegación no se basen en datos de posición incorrectos.
4. Procedimiento de acuerdo con cualquiera de las reivindicaciones anteriores, en el que el valor de la desviación se determina de acuerdo a la fórmula:
Valor de la desviación = I dADS-B –dEST I
donde dADS-B es la distancia entre la posición de la unidad de recepción (3) y la supuesta posición (PADS-B (5) ;PADSB (5') , PADS-B (15") ) de un vehículo, y dEST es la distancia estimada (dEST (5) , dEST (5') , dEST (15") ) entre la unidad de recepción (3) y la fuente de radio (5; 5', 15") .
5. Procedimiento de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dicha primera señal (13; 13', 13") es un mensaje de ADS-B (13; 13', 13") según el formato de VDL de Modo 4 y el enlace de datos es un enlace de datos basado en TDMA, tal como un enlace de datos STDMA.
6. Un sistema de vigilancia de vehículos (17) para aplicaciones de vigilancia de vehículos, en el que los vehículos (3, 5, 5') transmiten los datos de posición que indican su propia posición a los vehículos circundantes (3, 5, 5') , que comprende:
medios de recepción (9; 23) adaptados para recibir (S1) una primera señal (13; 13', 13") que transporta datos de posición que indican una supuesta posición (PADS-B (5) ;PADS-B (5') , PADS-B (15'') ) de un vehículo, transmitida desde una fuente de radio (5; 5', 15") a través de un enlace de datos;
medios de estimación de distancia (9; 23, 31) adaptados para calcular (S2) la distancia (dEST (5) , dEST (5') , dEST (15") ) a la fuente de radio (5; 5', 15") en base al tiempo de vuelo, TOF, y la velocidad de propagación de la señal recibida (13; 13', 13") , y
medios de comparación (33) adaptados para determinar (S3) un valor de desviación que indica la diferencia entre una distancia a la posición (PADS-B (5) ;PADS-B (5') , PADS-B (15") ) de un vehículo de acuerdo con los datos de posición recibidos y la distancia estimada (dEST (5) , dEST (5') , dEST (15") ) a la fuente de radio (5; 5', 15") ,
caracterizado porque dicho enlace de datos es un enlace de datos a través del cual se inician las transmisiones de señales portadoras de datos de posición que indican presuntas posiciones de los vehículos en los puntos de transmisión dados en el tiempo (14) que son conocidos por todos los usuarios de dicho enlace de datos, y porque dichos medios de estimación de distancia (9; 23, 31) están adaptados para determinar dicho TOF en base al tiempo (Δt) transcurrido desde el punto de transmisión en el tiempo (14) de dicha primera señal en el momento de recepción (16) de al menos una primera parte de dicha primera señal.
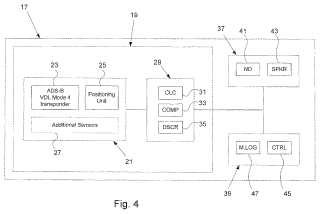
7. Sistema de vigilancia de vehículos (17) de acuerdo con la reivindicación 6, que comprende además medios de discriminación (35) conectados a un módulo de información (37) para informar a un usuario del tráfico de vehículos que lo rodea y/o a una unidad de decisión y de maniobra (39) para el control de un vehículo en el que está incluido el
sistema (17) , estando dichos medios de discriminación (35) adaptados para descartar los datos de posición que indican una supuesta posición (PADS-B (5) ;PADS-B (5') , PADS-B (15") ) de un vehículo al cual, de acuerdo con el valor de la desviación determinado por los medios de comparación (33) , la distancia difiere sustancialmente de la distancia estimada (dEST (5) , dEST (5') , dEST (15") ) a la fuente de radio (5; 5', 15") .
8. Sistema de vigilancia de vehículos (17) de acuerdo con cualquiera de las reivindicaciones 6 ó 7, en el que los medios de recepción (9; 23) comprenden un transpondedor ADS-B (9; 23) conforme al formato de VDL Modo 4, estando dicho transpondedor ADS-B VDL Modo 4 (9; 23) adaptado para recibir mensajes de VDL en Modo 4 (13; 13', 13") que son transmitidos a través de un enlace de datos basado en TDMA, tal como un enlace de datos STDMA.
9. Sistema de vigilancia de vehículos (17) según cualquiera de las reivindicaciones 6 a 8, estando dicho sistema (17)
situado en una aeronave (3) y que se utiliza como un sistema de vigilancia de la aeronave (17) para la provisión de separación y/o aplicaciones de evitación de colisión.
10. Un vehículo (3, 5, 3, 5') , caracterizado porque comprende un sistema de vigilancia de vehículos (17) de acuerdo con cualquiera de las reivindicaciones 6 a 9.
11. Vehículo (3, 5; 3, 5') de acuerdo con la reivindicación 10, en el que dicho vehículo es una aeronave (3, 5; 3, 5') .
12. Vehículo (3, 5; 3, 5') de acuerdo con la reivindicación 11, en el que dicha aeronave (3, 5; 3, 5') es un vehículo aéreo no tripulado, UAV.
13. Vehículo (3, 5; 3, 5') de acuerdo con la reivindicación 10, en el que dicho vehículo es un barco.
14. Una estación terrestre de control del tráfico aéreo [ATC] (7) para la vigilancia de tráfico aéreo, caracterizada porque comprende un sistema de vigilancia de vehículos (17) de acuerdo con cualquiera de las reivindicaciones 6 a
9.
15. Estación terrestre de servicio de tráfico marítimo [VTS] para la vigilancia del tráfico marítimo, caracterizada porque comprende un sistema de vigilancia de vehículos (17) de acuerdo con cualquiera de las reivindicaciones 6 a 9.
Patentes similares o relacionadas:
SISTEMA DE MICRO CAMARAS CON SENSORES DE MOVIMIENTO PARA AYUDA A LA CONDUCCIÓN, del 21 de Enero de 2020, de PALAZZOLO, Umberto: 1. Sistema de micro cámaras con sensores de movimiento para ayuda a la conducción, caracterizado esencialmente, porque está formado por micro cámaras […]
Mejoras aportadas y relativas a los datos de rumbos de navegación y/o de velocidad de un buque, del 15 de Octubre de 2019, de BAE SYSTEMS PLC: Un método para determinar una velocidad de un buque, en donde el buque es una embarcación , ubicada en una zona litoral, que comprende las etapas de: detectar objetos […]
Dispositivo para un vehículo, del 11 de Septiembre de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para medir un posible espacio de estacionamiento (P) mediante un vehículo que pasa al espacio de estacionamiento (P), donde mediante un […]
Aparato de tratamiento de señales para generar un mapa de Alcance-Doppler, del 28 de Agosto de 2019, de AptCore Ltd: Aparato de tratamiento de señales para generar un mapa de alcance-Doppler , comprendiendo el aparato: una unidad de cálculo de transformada […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]
SISTEMA DE CONDUCCIÓN ASISTIDA BASADO EN UNA RED DE COMUNICACIÓN DE ONDA MILIMÉTRICA Y DETECCIÓN DE OBJETOS POR TÉCNICAS RADAR, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración de componentes en vehículos y un método de operación de los mismos que posibilita al conductor […]
MÉTODO DE DETECCIÓN Y GESTIÓN DE FATIGA MENTAL DURANTE LA CONDUCCIÓN BASADO EN ANALISIS DE MIRADA Y DETECCION DE OBJETOS, del 27 de Junio de 2019, de PARDO GUZMAN, Dino Alejandro: Un método y detección y gestión de fatiga mental para aumentar la seguridad y confort de los conductores de tracto camiones, basado en análisis […]
Sistema satelital autónomo de evitación de desechos orbitales, del 15 de Mayo de 2019, de Briskman, Robert: Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , […]