Procedimiento de radar y sistema de radar para automóviles.
Procedimiento de radar-FMCW, en el que un sistema de radar (10) de un automóvil irradia y recibe ondas deradar y en el que se determina una distancia de un objeto (16) con respecto al automóvil a partir de undesplazamiento de la frecuencia entre onda de radar emitidas y recibidas y en el que se determina una velocidad deun objeto,
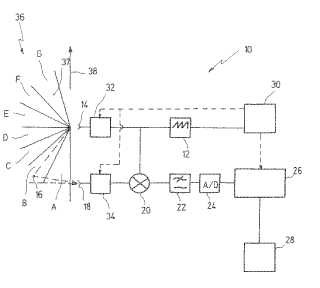
en el que el procedimiento se realiza en primeros intervalos de tiempo (T_A, T_B) para objetos en almenos una primera sección parcial (A, B) de una zona de detección del sistema de radar (10), y en segundosintervalos de tiempo (T_C, T_D, T_E, T_F, T_G) se determinan distancias, pero no velocidades para objetos en almenos una segunda zona parcial (C, D, E, F, G) de la zona de detección, en el que se modula periódicamente unafrecuencia de las ondas de radar irradiadas y en el que se exploran secuencialmente las zonas parciales,caracterizado por que la velocidad de un objeto se determina a partir de posiciones de fases de ondas de radarrecibidas, se calculan las posiciones de fases para un primer número (n_1) de periodos y se calcula eldesplazamiento de la frecuencia para un segundo número (n_2) de periodos de la modulación, en el que el segundonúmero (n_2) es menos que el primer número (n_1).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/008325.
Solicitante: VALEO SCHALTER UND SENSOREN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: LAIERNSTRASSE 12 74321 BIETIGHEIM-BISSINGEN ALEMANIA.
Inventor/es: HABERLAND,UDO, LÜBBERT,URS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/93 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para anticolisión.
PDF original: ES-2437203_T3.pdf
Fragmento de la descripción:
Procedimiento de radar y sistema de radar para automóviles La invención se refiere a un procedimiento de radar-FMCW (FMCW = onda continua de frecuencia modulada) de acuerdo con el preámbulo de la reivindicación 1. La invención se refiere, además, a un sistema de radar de acuerdo con el preámbulo de la reivindicación 8.
Un procedimiento de radar de este tipo y un sistema de radar de este tipo se conocen, respectivamente, a partir del documento US 5.940.011. En el procedimiento conocido se emplea una configuración de antenas múltiples, que define seis espacios de exploración a la derecha y a la izquierda del vehículo así como detrás del vehículo. Un primer espacio de exploración está definido en el lado derecho del vehículo, un segundo espacio de exploración está definido en el lado derecho y detrás del vehículo y solape el primer espacio de exploración, un tercero y un cuarto espacios de exploración se extiende desde la parte trasera hacia ambos lados del vehículo a lo largo de los carriles adyacentes, u quinto espacio de exploración está definido en el lado izquierdo del vehículo y un sexto espacio de exploración está definido en el lado izquierdo y detrás del vehículo y solapa el segundo y quinto espacios de exploración.
Se emite una señal de alarma para el lado derecho cuando se reconoce un obstáculo en una zona derecha del detector, que no es definida por el primer espacio de exploración o por una sección del segundo espacio de exploración, que no solapa el tercero o sexto espacios de exploración. Para el lado izquierdo se forma, dado el caso, de manera similar una señal de alarma. Se emite una señal de alarma de marcha atrás cuando se reconoce un obstáculo en una zona de solape entre el segundo y el sexto espacios de exploración. El tercero y el cuarto espacios de exploración reconocen obstáculos, cuya velocidad de marcha permite al obstáculo entrar dentro de un periodo de tiempo predeterminado en la zona derecha o en la zona izquierda del detector, de manera que se emite una señal de alarma correspondiente para el lado derecho o el lado izquierdo.
De esta manera, el documento US 5.940.011 publica un reconocimiento del lugar a través de combinación lógica de eventos en varios espacios de exploración y una detección de la velocidad en el tercero o cuarto espacios de exploración.
En este caso, se determina la velocidad de un objeto detectado por el sistema de radar por medio de una estimación de parámetros 2D desde varias distancias. A tal fin, una instalación de cálculo de parámetros 2D realiza cálculos sobre una disposición de objetos 2D, que es generada por una instalación adaptable de valores umbrales. La instalación de cálculo de parámetros 2D genera una señal de estimación 2D, que presenta componentes en función de la velocidad y de la distancia de objetos posibles detectados. En este caso, solamente se analizan objetos, que son mayores que le señal del perfil de la zona umbral y solamente los recorridos de los objetos, que están más próximos a un movimiento a velocidad constante, pasan el valor umbral. Un objeto es válido cuando se extiende más allá de intervalos de umbrales suficientes y cuando su recorrido coincide con un recorrido relativamente no acelerador. Este valor de estimación se utiliza entonces para una decisión de previsión acerca de si el objeto llega dentro del segundo siguiente a la zona de detección lateral.
El documento US 5.940.011 reivindica para su algoritmo que éste presenta propiedades de supresión de la señal de interferencia superiores (superior clutter rejection properties) y rechaza objetos, que se encuentra por encima de los límites de velocidad permitidos. Para una detección de objetos traseros y laterales, para los que solamente es necesaria una información de la distancia, no se ejecuta el algoritmo de parámetros 2D (ver el documento US 5.940.011, página 7, líneas 16-38) .
Se conoce un radar-FMCW a partir del documento DE 196 10 970 A1.
En términos generales, en un radar-FMCW se varía periódicamente en el tiempo la frecuencia de ondas de radar difundidas de acuerdo con un patrón predeterminado. Las ondas de radar reflejadas en un objeto han recorrido a la recepción a través del sistema de radar la distancia doble del objeto e inciden con un retardo de tiempo proporcional a ellas de nuevo en el sistema de radar.
Puesto que la frecuencia de las ondas de radar a irradiar se ha modificado durante este retardo de tiempo, las señales de emisión que se propagan en un instante determinado en el sistema de radar presentan una diferencia de frecuencia d_f (r) , que depende de la distancia del objeto r y del tipo de la variación de la frecuencia de emisión. En el caso de una variación lineal temporal y en el caso de objetos en reposo con relación al sistema de radar, d_f (r) es directamente proporcional a la distancia del objeto. En el caso de un movimiento relativo con velocidad relativa v, aparece adicionalmente un desplazamiento Doppler dependiente de la velocidad de la frecuencia, cuyo signo depende de la dirección de la velocidad y del signo de la variación de la frecuencia de emisión.
Para la determinación de la diferencia de la frecuencia se mezcla la señal de emisión normalmente con la señal de recepción para formar una señal de frecuencia intermedia, que presenta, como consecuencia, una porción de la señal espectral con el valor de la diferencia de la frecuencia y otras porciones a frecuencias más elevadas. A través
de un filtro de paso bajo se separan las porciones de frecuencias más elevadas y la señal remanente, en la que se reproducen los desplazamientos de la frecuencia en función del tiempo de propagación y en función de la velocidad, es analizada espectralmente.
De acuerdo con el documento DE 196 10 970 A1 se obtiene para incrementos periódicos de la frecuencia de emisión esencialmente un valor de la frecuencia (línea espectral) durante la suma de los desplazamientos de la frecuencia en función de la distancia y en función de la velocidad, mientras que para reducciones periódicas de la frecuencia de emisión se obtiene un valor de la frecuencia en la diferencia de los desplazamientos de la frecuencia mencionados. A través de la formación del valor medio y la diferencia de estos valores de la frecuencia se pueden determinar individualmente los valores de los desplazamientos de la frecuencia en función e la distancia y en función de la velocidad. Por lo tanto, durante esta evaluación se determinan tanto las distancias como también las velocidades finalmente a partir de la frecuencia de la señal de frecuencia intermedia. Esto requiere, sin embargo, una asociación unívoca de líneas espectrales y objetos, lo que no es sin más el caso en varios objetos reflectantes a distancia similar.
Para determinar también en el caso de varios objetos las distancias y las velocidades de manera específica del objeto, el documento DE 196 10 970 A1 mencionado al principio propone derivar las distancias a partir de la frecuencia de la señal de la frecuencia intermedia y derivar las velocidades a partir de informaciones de fases a partir de la señal de frecuencia intermedia. De acuerdo con el documento DE 196 10 970 A1, el argumento de la señal de frecuencia intermedia, es decir, su fase, contiene especialmente un término dependiente de la distancia. Puesto que la distancia en el caso de un movimiento relativo entre el sistema de radar y el objeto se modifica en una medida insignificante entre dos periodos de la variación de la frecuencia de emisión, se modifica también el término dependiente de la distancia en la fase de la señal de la frecuencia intermedia. A partir de la medida de la modificación de la fase durante al menos dos periodos de la variación de la frecuencia de emisión debe deducirse, de acuerdo con el documento DE 196 10 970 A1, la velocidad relativa. En este caso, se obtiene la información de las fases, respectivamente, a partir de una fase de una transformada de Fourier de la señal de la frecuencia intermedia. Para obtener dos valores de fases, debe recorrerse, por lo tanto, para cada objeto dos periodos de la variación de la señal de emisión y para cada periodo debe realizarse una transformación de Fourier.
En automóviles se emplean sistemas de radar para la supervisión del entorno del vehículo, contemplando aplicaciones como ayuda de aparcamiento, supervisión del ángulo muerto, asistencia en caso de cambio de carril, asistencia de apertura de puerta, una anticipación de accidentes (pre-crash-sensing) para una activación de Airbag, tensión del cinturón, activación del arco anti-vuelco, modo Start-Stop o funcionamiento de marcha con supervisión de la distancia y/o regulación de la distancia (apoyo de control... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de radar-FMCW, en el que un sistema de radar (10) de un automóvil irradia y recibe ondas de radar y en el que se determina una distancia de un objeto (16) con respecto al automóvil a partir de un desplazamiento de la frecuencia entre onda de radar emitidas y recibidas y en el que se determina una velocidad de un objeto, en el que el procedimiento se realiza en primeros intervalos de tiempo (T_A, T_B) para objetos en al menos una primera sección parcial (A, B) de una zona de detección del sistema de radar (10) , y en segundos intervalos de tiempo (T_C, T_D, T_E, T_F, T_G) se determinan distancias, pero no velocidades para objetos en al menos una segunda zona parcial (C, D, E, F, G) de la zona de detección, en el que se modula periódicamente una frecuencia de las ondas de radar irradiadas y en el que se exploran secuencialmente las zonas parciales, caracterizado por que la velocidad de un objeto se determina a partir de posiciones de fases de ondas de radar recibidas, se calculan las posiciones de fases para un primer número (n_1) de periodos y se calcula el desplazamiento de la frecuencia para un segundo número (n_2) de periodos de la modulación, en el que el segundo número (n_2) es menos que el primer número (n_1) .
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado por que el segundo número (n_2) es igual a 1 y el primer número (n_1) es mayor o igual a 16.
3. Procedimiento de acuerdo con la reivindicación 2, caracterizado por que el primer número (n_1) es igual a 32.
4. Procedimiento de acuerdo con al menos una de las reivindicaciones 1 a 3, caracterizado por que las distancias se determinan con la ayuda de una primera transformación de Fourier, que se aplica sobre un producto de mezcla filtrado por paso bajo de una señal de emisión y de una señal de recepción, y por que las velocidades se determinan con la ayuda de al menos una segunda transformación de Fourier, que se aplica sobre posiciones de fases de eventos de la primera transformación de Fourier.
5. Procedimiento de acuerdo con la reivindicación 4, caracterizado por que se distinguen objetos diferentes unos de los otros a través de sus distancias y/o velocidades.
6. Procedimiento de acuerdo con al menos una de las reivindicaciones 1 a 5, caracterizado por que una duración periódica de la modulación de ondas de radar irradiadas es menor que medio ms.
7. Procedimiento de acuerdo con al menos una de las reivindicaciones 1 a 6, caracterizado por que las secciones parciales individuales cubren una zona de detección coherente del sistema de radar y por que un número de las primeras secciones parciales es menor que un número de las segundas secciones parciales.
8. Sistema de radar (10) de un automóvil, que irradia y recibe ondas de radar y que determina una distancia de un objeto con respecto al automóvil a partir de un desplazamiento de la frecuencia entre ondas de radar emitidas y recibidas y que determina una velocidad de un objeto, en el que el sistema de radar (10) determinan las distancias y velocidades en primeros intervalos de tiempo (T_A, T_B) para objetos en al menos una primera sección parcial (A, B) de una zona de detección del sistema de radar (10) , y en segundos intervalos de tiempo (T_C, T_D, T_E, T_F, T_G) determina distancias, pero no velocidades para objetos en al menos una segunda sección parcial (C, D, E, F, G) de la zona de detección del sistema de radar (10) , en el que el sistema de radar (10) modula periódicamente una frecuencia de las ondas de radar irradiadas y explora secuencialmente las secciones parciales, caracterizado por que el sistema de radar (10) está instalado para determinar la velocidad de un objeto a partir de posiciones de fases de ondas de radar recibidas, calcular las posiciones de fases para un primer número (n_1) de periodos, y para calcular el desplazamiento de la frecuencia para un segundo número (n_2) de periodos de la modulación, en el que el segundo número (n_2) es menor que el primer número (n_1) .
9. Sistema de radar (10) de acuerdo con la reivindicación 8, caracterizado por que realiza al menos uno de los procedimientos de acuerdo con las reivindicaciones 2 a 7.
Patentes similares o relacionadas:
SISTEMA DE MICRO CAMARAS CON SENSORES DE MOVIMIENTO PARA AYUDA A LA CONDUCCIÓN, del 21 de Enero de 2020, de PALAZZOLO, Umberto: 1. Sistema de micro cámaras con sensores de movimiento para ayuda a la conducción, caracterizado esencialmente, porque está formado por micro cámaras […]
Mejoras aportadas y relativas a los datos de rumbos de navegación y/o de velocidad de un buque, del 15 de Octubre de 2019, de BAE SYSTEMS PLC: Un método para determinar una velocidad de un buque, en donde el buque es una embarcación , ubicada en una zona litoral, que comprende las etapas de: detectar objetos […]
Dispositivo para un vehículo, del 11 de Septiembre de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para medir un posible espacio de estacionamiento (P) mediante un vehículo que pasa al espacio de estacionamiento (P), donde mediante un […]
Aparato de tratamiento de señales para generar un mapa de Alcance-Doppler, del 28 de Agosto de 2019, de AptCore Ltd: Aparato de tratamiento de señales para generar un mapa de alcance-Doppler , comprendiendo el aparato: una unidad de cálculo de transformada […]
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado, del 31 de Julio de 2019, de AUDI AG: Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por […]
MÉTODO DE DETECCIÓN Y GESTIÓN DE FATIGA MENTAL DURANTE LA CONDUCCIÓN BASADO EN ANALISIS DE MIRADA Y DETECCION DE OBJETOS, del 27 de Junio de 2019, de PARDO GUZMAN, Dino Alejandro: Un método y detección y gestión de fatiga mental para aumentar la seguridad y confort de los conductores de tracto camiones, basado en análisis […]
SISTEMA DE CONDUCCIÓN ASISTIDA BASADO EN UNA RED DE COMUNICACIÓN DE ONDA MILIMÉTRICA Y DETECCIÓN DE OBJETOS POR TÉCNICAS RADAR, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración de componentes en vehículos y un método de operación de los mismos que posibilita al conductor […]
Sistema satelital autónomo de evitación de desechos orbitales, del 15 de Mayo de 2019, de Briskman, Robert: Un sistema satelital que puede evitar de forma autónoma una colisión con desechos orbitales , que incluye un satélite , […]