CIP-2021 : B25J 9/16 : Controles por programa (control total de una fábrica, es decir,
control centralizado de varias máquinas, G05B 19/418).
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/16[1] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/16 · Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
CIP2021: Invenciones publicadas en esta sección.
Método de alineación de sistemas de referencia de brazo de una máquina de medición de múltiples brazos.
(07/05/2014) Un método de alineación de sistemas de referencia de brazo de una máquina de medición de múltiples brazos que comprende por lo menos dos unidades de medición , teniendo cada una un brazo móvil , y una herramienta de medición que puede moverse mediante dicho brazo en un volumen de medición (M1, M2) respectivo; teniendo los volúmenes de medición (M1, M2) de dichas unidades de medición una intersección (I), y definiendo como un todo un volumen de medición de máquina (M) igual a los volúmenes de medición combinados (M1, M2) de las unidades de medición individuales; y comprendiendo el método las etapas de. fijar por lo menos un miembro de referencia al brazo de por lo menos una primera de dichas unidades de medición ;
calificar cada una de dichas…
Procedimiento de control de una célula de trabajo automatizada.
(02/04/2014) Procedimiento de control de una célula de trabajo automatizada que comprende
- al menos un brazo de robot , con al menos tres grados de libertad pilotados según varios ejes de control (A1-A6, X, Y, Z, Rx, Ry, Rz)
- una central de control ,
- un dispositivo de control del brazo de robot , que incluye varios controladores de motores que pilotan cada uno el funcionamiento de un motor (M1-M6) adaptado para maniobrar al menos una parte del brazo del robot ,
- un bus de comunicación entre la central de control y el dispositivo de control del brazo del robot , caracterizado por el hecho de que este procedimiento comprende etapas consistentes en:
a) transmitir consignas (C1i), emitidas por la central de control para el pilotaje de los ejes de control, a una única unidad de cálculo que pertenece al dispositivo…
Procedimiento de control de una célula de trabajo automatizada.
(02/04/2014) Procedimiento de control de una célula de trabajo automatizada que comprende
- al menos un brazo de robot con al menos tres grados de libertad pilotados según varios ejes de control (A1-A6; X, Y, Z, Rx, Ry, Rz),
- una central de control ,
- un dispositivo de control del brazo de robot , que incluye varios controladores de motor que pilotan cada uno el funcionamiento de un motor (M1-M6) adaptado para maniobrar al menos una parte del brazo de robot ,
- un bus de comunicación entre la central de control y el dispositivo de control del brazo de robot , caracterizado por el hecho de que este procedimiento comprende etapas consistentes en:
a) asociar a cada eje de control de movimiento (A1-A6; X, Y, Z, Rx, Ry, Rz) del brazo de robot un controlador de eje ficticio que se supone que recibe consignas…
Un método para calibración de un robot posicionado sobre una plataforma móvil.
(19/03/2014) Un método para calibración de un robot , que incluye una pluralidad de uniones y posicionado sobre una plataforma móvil , con relación a un objeto de trabajo utilizando una unidad de medición montada sobre una muñeca (1d) del robot, caracterizado por que el método incluye las siguientes primeras etapas realizadas en un sistema de software CAD:
- cargar modelos CAD del robot , la plataforma móvil , la unidad de medición sobre el robot, y el objeto de trabajo dentro del sistema CAD,
- colocar los modelos CAD de la plataforma y el objeto de trabajo en una relación entre sí, de manera que el robot es capaz de alcanzar el objeto de trabajo,
- manipular las uniones del…
Procedimiento y sistema de asistencia para la manipulación de máquinas robotizadas en un entorno congestionado.
(20/11/2013) Procedimiento de asistencia para la manipulación de al menos una primera máquina móvil robotizada quese desplaza por un entorno de trabajo congestionado bajo el control de al menos una segunda máquina móvilrobotizada, como un sensor o una herramienta que interactúa con dicho entorno, caracterizado porque comprendeal menos las siguientes etapas:
• modelización de una representación virtual, en tres dimensiones, del entorno de trabajo y de los objetosreales que este comprende;
• determinación, en el entorno de trabajo, de un punto de destino hacia el cual está orientada la línea devisión de dicha segunda máquina móvil robotizada;
• determinación…
Aparato y método para la generación de un camino libre de colisiones de una máquina rectificadora.
(08/11/2013) Dispositivo de control de la máquina para una máquina rectificadora con un cabezal de rectificado y conun soporte de pieza de trabajo , que se pueden mover con respecto entre sí mediante un control de varios ejes en una pluralidad de direcciones (X, Y, Z, A) en un espacio de trabajo (R), en donde los medios deaccionamiento están conectados al control del motor ,
con una unidad de procesamiento y con una unidad de memoria ,
caracterizado porque,
la unidad de memoria proporciona un suministro de datos (D) previamente calculado para un espacio de trabajo(R) dividido en elementos de discretización (xiyj),
a los elementos de discretización (xiyj) para herramientas predefinidos y para piezas de trabajo predeterminadas están asociados en posiciones predeterminadas…
Procedimiento y dispositivo para regular un manipulador.
(30/09/2013) Procedimiento para regular un manipulador de múltiples ejes, en particular un robot , que comprende lospasos de:
regulación flexible (S50) de al menos un eje guía; y
regulación rígida (S50) de al menos otro eje;
caracterizado porque
se determina un valor teórico (q2s, q5s) del al menos otro eje en base a un valor real (q3mess) del eje guía y sepredetermina una fuerza (Fmax) ante la que el manipulador debe ceder de forma flexible y/o una línea de acción(s + λk) a lo largo de la cual debe desviarse el manipulador de modo flexible, particularmente en el espacio detrabajo; y opcionalmente se conmuta entre una regulación flexible y una regulación…
Un método y un sistema para facilitar la calibración de una célula robótica programada fuera de línea.
(11/07/2013) Un método para facilitar la calibración de una célula robótica que incluye uno o más objetos y un robot industrial que realiza trabajos en conexión con los objetos, en el que la célula robótica es programada por medio de unaherramienta o útil de programación fuera de línea que incluye un componente gráfico para generar gráficos en 2D o 3Dbasados en modelos gráficos de los objetos, caracterizado por que el método comprende:
almacenar para cada uno de los objetos una secuencia de puntos de calibración incluyendo información sobre unorden deseado en el que los puntos de calibración deberían ser visitados durante la calibración,
generar automáticamente una secuencia de imágenes que muestra el orden en el que los puntos de calibraciónhan de ser visitados, cada una de las imágenes incluye…
PROCEDIMIENTO Y SISTEMA PARA SEPARAR PIEZAS DE FUNDICIÓN DE RACIMOS OBTENIDOS MEDIANTE PROCESOS DE FUNDICIÓN.
(20/06/2013) El procedimiento comprende la colocación del racimo en una primera zona de trabajo (z1), la obtención de una imagen del racimo mediante un primer sistema de visión artificial y su procesado, obtención de la orientación de las piezas de fundición y las coordenadas de los puntos de corte referenciados al sistema de referencia espacial (X, Y, Z) del primer sistema de visión artificial , conversión de las coordenadas de los puntos de corte y orientación de las piezas al sistema de referencia espacial (X',Y', Z') de un primer manipulador dispuesto en una segunda zona de trabajo (z2), determinación del ángulo de ataque para la separación de cada pieza de fundición y transmisión…
Control de la trayectoria de un robot que incluye un sistema y un método de vía de evacuación de emergencia.
(17/06/2013) Proceso para controlar un recorrido de un robot (R) durante una evacuación de emergencia desde un recorridoprincipal , comprendiendo el proceso: proporcionar un recorrido principal para el movimiento del robot,teniendo dicho recorrido principal puntos de posición (34; 34'); mover el robot a lo largo de dicho recorridoprincipal; proporcionar un recorrido de seguridad desde cada punto de posición del recorridoprincipal para llegar, a través de al menos un punto de nivel de seguridad , a una posición segura final diferente de los puntos de nivel de seguridad, estando asociado un punto de nivel deseguridad con varios de dichos puntos de posición en el recorrido principal;…
Procedimiento para la detección de colisión.
(30/04/2013) Procedimiento de monitorización para un sistema de accionamiento de un robot, en particular de un robot depintura, con un motor y una parte móvil accionada por el motor, que presenta las siguientes etapas:
- medir al menos una magnitud de movimiento en el lado conductor (jA1, wA1) del motor,
- establecer al menos una magnitud de movimiento en el lado conducido (xM1, aM1) de la parte móvil,
- determinar una señal de error (FPERT) en función de la magnitud de movimiento medida en el lado conductor(jA1, wA1) del motor y de la magnitud de movimiento medida en el lado conducido (xM1, aM1) de la parte móvil,caracterizado porque comprende una medición de la magnitud de movimiento en el lado…
Procedimiento de calibración para robots gemelos.
(12/03/2013) Procedimiento para la calibración de un robot con un armazón portante y al menos tres brazos principales (7a, 7b, 7c) alojados de forma móvil con respecto al armazón portante y al menos tres antebrazos (10a, 10b, 10c) que durante el funcionamiento unen respectivamente un brazo principal (7a, 7b, 7c) con un placa de colocación , caracterizado por la separación de al menos algunos antebrazos (10a, 10b, 10c) de los brazos principales (7a, 7b, 5 7c) o de la placa de colocación , de tal manera que es posible un movimiento libre de los brazos principales (7a, 7b, 7c), así como por el movimiento de los extremos externos opuestos al armazón portante de los brazos principales (7a, 7b, 7c) a una ubicación en el espacio relativa unos con respecto a otros y la unión de los extremos externos de los brazos principales (7a, 7b,…
SISTEMA Y MÉTODO PARA EL RECUBRIMIENTO CON ELASTÓMEROS Y FLUOROPOLÍMEROS DE PIEZAS Y SOPORTES METÁLICOS.
(22/02/2013) Sistema para el recubrimiento con elastómeros y fluoropolímeros de piezas y soportes metálicos de uso en aplicaciones alimentario que comprende una cabina de pintado y un robot industrial con una pluralidad de herramientas de pintado que se caracteriza porque comprende una mesa de apilado de las piezas a recubrir, en donde se forman pilas de similares dimensiones; y en donde las piezas de la pila son parametrizadas de acuerdo a sus características esenciales, ancho, largo, altura de cada pieza, velocidad de desplazamiento del cabezal de recubrimiento, tipología de la pieza, y número de piezas, en una unidad de parametrización que transmite una matriz con los datos parametrizados a los medios de control del robot…
Procedimiento y sistema para estimar el desgaste de ejes de un brazo de robot.
(10/10/2012). Solicitante/s: ABB AG. Inventor/es: HANSEN, SVEN, SCHMIDT, STEFFEN, BADER,AXEL DIPL.-ING, HENRICH,KIM DIPL.-ING.
Procedimiento para estimar el desgaste de ejes de un brazo de robot de un robot industrial, estableciéndose comobase de un análisis un curso de par en al menos un eje durante al menos un ciclo de trabajo del robotindustrial, analizándose el curso de par buscando tramos de curso de par que se salgan de una franja depar establecida previamente y obteniéndose mediante la evaluación de la frecuencia y/o del curso de curva de lostramos de curso de par un desgaste actual del eje.
PDF original: ES-2393350_T3.pdf
Instalación de paletización combinada con acceso asegurado.
(25/07/2012) Instalación constituida por una máquina de embalaje de productos y por un puesto robotizado depaletización cuyo robot coge las cajas llenas con los citados productos a la salida de la citada máquina de embalaje para disponerlas, según un esquema apropiado, por medio de un cabezal de agarre , sobre un palé colocado en la citada salida, estando dispuestos la citada máquina de embalaje y el citado puesto depaletización en un mismo recinto cerrado que está constituido por unas paredes laterales , una pared trasera y una pared frontal provista de una puerta que ofrece acceso al citado puesto de paletización,caracterizada porque incluye:
- un medio de detección de intrusión que se sitúa al nivel de dicha puerta ,
- unos medios que limitan el campo de evolución del citado robot en el citado recinto cerrado paraconcentrar…
SISTEMA EXTERNO PARA MEJORA DE LA PRECISIÓN ROBÓTICA.
(03/07/2012) Sistema externo para mejora de la precisión robótica.
El concepto de la invención del sistema de metrología (el sistema) determina de forma activa la representación de los Grados de Libertad (6-GDL) de un dispositivo de movimiento tal como un robot industrial, pero sin quedar limitado a él, que usa un extremo de herramienta de brazo (EDHB). Un concepto del sistema incluye el uso de dispositivos de orientación de láser sin ninguna capacidad inherente de variar en combinación con los objetivos montados en EDHB para determinar de forma activa la representación del EDHB en distintas posiciones de trabajo de al menos un dispositivo de movimiento.
Sistemas robóticos altamente configurables para cirugía y otros usos.
(04/06/2012) A sistema robótico que comprende : un conjunto de manipulador para desplazar robóticamente un efector de extremo distal con respecto a una base proximal , el conjunto de manipulador teniendo una pluralidad de articulaciones (J1-J10), las articulaciones (J1-J10) teniendo grados de libertad redundantes para desplazar robóticamente el efector de extremo distal ; un dispositivo de entrada para recibir una indicación de un movimiento deseado del efector de extremo distal ; y un procesador configurado para de forma concurrente en un modo de manipulación del efector de extremo distal en el que el procesador determina un movimiento deseado de las articulaciones (J1-J10) para efectuar el movimiento…
Controlador de robot y sistema de robot.
(16/05/2012) Un aparato de control de robot adaptado para controlar una pluralidad de robots (R1, R2, R3, R4) de manera simultánea basado en un programa de robot, dicho aparato de control de robot comprende:
una parte de registro de unidad adaptada para combinar arbitrariamente una o más de la pluralidad de robots una parte de registro de unidad para combinar arbitrariamente una o más de la pluralidad de robots (R1, R2, R3, R4) para definir una unidad,
una pare de registro de tarea adaptada para asignar una tarea para cada una de las unidades, una parte de procesamiento de lenguaje de gráficos adaptado para formar el programa de…
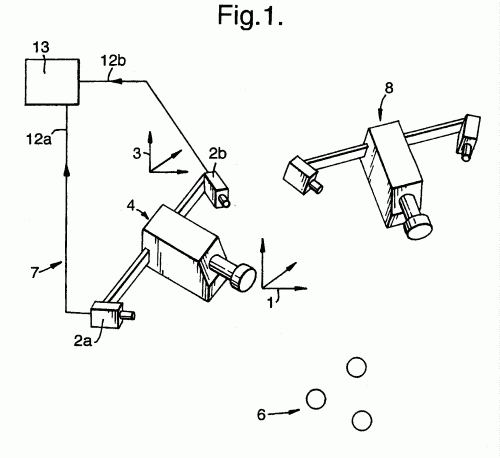
Robot trepador equipado con una unidad de trabajo, y sistema de control de tales robots trepadores.
(02/05/2012) Robot trepador equipado con una unidad de trabajo, del tipo que comprende:
un chasis , el cual tiene referenciados imaginariamente tres ejes coordenados X, Y, Z, en el que el eje Xestá alineado con una dirección de avance de dicho chasis y el eje Z está dirigido hacia una superficiede trabajo (S) sobre la que se desplaza el robot:
un primer conjunto de patas (2a, 2b) montado de manera desplazable linealmente en la dirección del eje Xrespecto al chasis y provisto de un primer dispositivo de acoplamiento por succión adaptado paraacoplar intermitentemente dicho primer conjunto de patas (2a, 2b) a la superficie de trabajo (S), estandocada pata (2a, 2b) del primer conjunto de patas (2a, 2b) montada de manera extensible en la dirección deleje Z hacia la superficie de trabajo (S), y retraíble de la misma, respecto al chasis ;
un segundo conjunto…
Procedimiento y aparato para montar un neumático en una llanta para formar una rueda de vehículo a motor y para desmontar un neumático de una llanta.
(28/03/2012) Procedimiento para montar un neumático sobre una llanta para formar una rueda de vehículo a motor y para desmontar un neumático de una llanta con al menos un herramienta de fijación o extracción, en el que las imágenes de la rueda o la llanta se crean mediante un sistema de visión y las señales correspondientes se envían a un ordenador , en el que comandos para mover la al menos una herramienta de fijación o extracción son enviados a la al menos una herramienta de fijación o extracción por el ordenador , en el que las señales del sistema de visión y los comandos enviados a la al menos una herramienta de fijación o extracción están correlacionadas para definir la posición de la al menos una herramienta de fijación o extracción con respecto al contorno…
Método de control para máquinas, que incluye un sistema, programa de ordenador, señales de datos e interfaz gráfica de usuario.
(27/03/2012) Un método para controlar una máquina para coger un objeto desde una primera posición y colocar el objeto en una segunda posición (4a, 4b, 4c), donde un miembro sensor proporciona datos sobre dicha primera posición a un miembro de control , caracterizado por -enviar un mensaje desde un proceso maestro del miembro de control que comprende uno o más de dichas primeras posiciones a todas las máquinas controladas por dicho miembro de control, -enviar un mensaje desde dicho miembro de control a todas las máquinas con un miembro indicados que especifica cual de una o más de dichas primeras posiciones deben utilizarse, -recibir un mensaje desde dicha máquina con un estado que indica que dicha primera posición
ha sido utilizada, -enviar un mensaje que comprende dicha primera posición , o más de…
DISPOSITIVO DE REGULACION PARA UN ROBOT MULTIAXIAL.
(16/05/2007). Solicitante/s: DURR SYSTEMS GMBH. Inventor/es: MEISSNER, ALEXANDER, DR., WILDERMUTH, DIETMAR, DR.
Dispositivo de regulación para un robot multiaxial, en particular para un robot de barnizado de una instalación de barnizado, con varios reguladores para la regulación de accionamiento en cada caso de un eje del robot, estando acoplados por lo menos dos reguladores de ejes diferentes entre sí solapando los ejes, caracterizado porque el acoplamiento solapando los ejes entre los reguladores se refiere a una desviación de regulación (?M) de un regulador , en la medida en que registra la desviación de regulación (?M) de uno de los reguladores y es retroacoplada en uno o varios reguladores distintos referidos al eje.
CONTROL DE ESCALERA ORIENTABLE.
(01/05/2007). Solicitante/s: IVECO MAGIRUS AG. Inventor/es: SAWODNY, OLIVER, ASCHEMANN, HARALD, HOFER, E. P.
Escalera orientable o similar que comprende una unidad de escalera, una jaula , dispositivos de mando y un medio de control para el desplazamiento de las partes de escalera , caracterizada porque el medio de control está diseñado de tal manera que cuando la jaula se desplaza, vibraciones de las partes de escalera son suprimidas y porque la flexión de la escalera en el sentido horizontal y vertical, es al menos una de las siguientes variables medidas: ángulo de elevación, ángulo de rotación, longitud del despliegue y masa de la jaula, son realimentadas mediante un controlador hacia las variables de control para los dispositivos de mando.
(16/04/2007) Escalera orientable o similar que tiene partes de escalera y una jaula que comprende: - un medio de control para el desplazamiento de dichas partes de escalera y diseñado de tal manera que cuando la jaula se desplaza, las vibraciones de las partes de escalera son suprimidas y la jaula es guiada sobre una trayectoria preestablecida, en la cual el movimiento ideal de la escalera está esquematizado en un modelo dinámico basado en ecuaciones diferenciales, y el medio de control calcula las variables de control de los dispositivos de mando de dichas partes de escalera para un desplazamiento sustancialmente si vibración de la escalera a partir del modelo dinámico; - un módulo de planificación de trayectoria (39 o 41) para producir la trayectoria de desplazamiento de la escalera en un entorno de trabajo; y - un bloque de control de gobierno…
PROCEDIMIENTO Y DISPOSITIVO PARA LA GUIA EXACTA DE UNA HERRAMIENTA DE MECANIZACION MEDIANTE UN ROBOT.
(01/03/2007) Procedimiento para la guía exacta de una herramienta de mecanización a lo largo de una curva, que está cerrada en si dentro del espacio; en este caso, la curva posee dos puntos extremos en uno de tos cuales en la fuerza del peso de la herramienta de mecanización es añadida a la fuerza de apriete mientras que, en el otro punto extremo, la fuerza del peso de la herramienta de mecanización es sustraída de la fuerza de apriete, y esta herramienta se hace pasar -por medio del sistema de control de un robot y con una determinada fuerza de apriete- a lo largo de los contornos de la pieza de trabajo, que ha de ser mecanizada;…
PROCEDIMIENTO DE MEDIDA Y COMPENSACION DE LAS ALTERACIONES CINEMATICAS DE UN ROBOT.
(16/11/2006) Procedimiento para el registro y la compensación de cambios cinemáticos de un robot debidos a influencias internas y/o externas que comprende las etapas de: Facilitación de un modelo de robot en forma de un algoritmo técnico con uno o más parámetros definidos, que describe la posición espacial teórica del robot en base a una o varias magnitudes de control; Colocación de un cuerpo de medición en la mano del robot ; Control de la posición espacial teórica del robot con el mando del robot según el modelo del robot; Definición de una cantidad de puntos de referencia (ai); Registro de la posición espacial real del robot durante el funcionamiento mediante el registro del cuerpo de medición con ayuda de un dispositivo sensórico (K1, K2; 50) en los puntos de referencia (ai); Registro de los cambios cinemáticos en base a la diferencia de la posición…
ROBOT ASISTENTE PARA LA REALIZACION DE FUNCIONES DE INSTRUMENTISTA QUIRURGICO EN EL ENTORNO DE UN QUIROFANO.
(01/06/2006). Ver ilustración. Solicitante/s: UNIVERSIDAD DE ALCALA.. Inventor/es: BOQUETE VAZQUEZ,LUCIANO, DAPENA CRESPO,MIGUEL A., BAREA NAVARRO,RAFAEL, GARCIA-SANCHO TELLEZ,LUIS.
Robot asistente para la realización de funciones de instrumentista quirúrgico en el entorno de un quirófano. Formado por un brazo robot industrial , una unidad de proceso para el control del sistema; la unidad de proceso controla los movimientos del brazo robot y además tiene incorporado el hardware para la captura y digitalización de imágenes provenientes de varias cámaras , digitalización de la señal de varios micrófonos comunicados con un sistema reconocedor de comandos vocales y del locutor que los ha pronunciado, control sobre un sistema de iluminación y salida de audio generado en un sintetizador de voz. El funcionamiento integrado de todos los elementos permite reconocer comandos vocales de diferentes personas, identificando el locutor y ejecutando los movimientos necesarios para recoger y entregar el instrumental utilizado en una operación quirúrgica, realizando las funciones de un instrumentista quirúrgico.
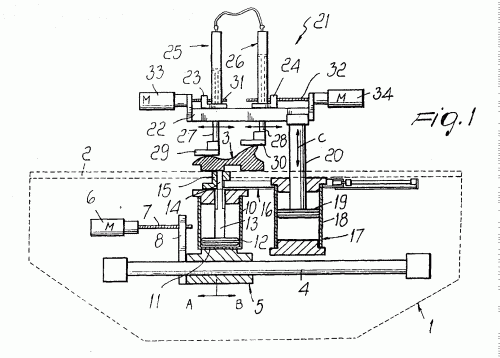
MAQUINA HERRAMIENTA Y DISPOSITIVO DE MANIPULACION ADAPTADO PAR MONTARLO EN UNA MAQUINA DE ESE TIPO.
(16/03/2006). Solicitante/s: SARTORIO, FRANCO. Inventor/es: SARTORIO, FRANCO.
Máquina-herramienta incluyendo una herramienta sostenida por un bastidor fijo a través de una estructura que se desplaza la cual permite que la herramienta se desplace con una velocidad máxima de la herramienta en por lo menos un plano de movimiento para llevar a cabo una operación de trabajo en una pieza de trabajo, accionamientos para controlar el movimiento de la herramienta y medios de control para controlar los movimientos de la herramienta , la estructura que se desplaza comprendiendo un primer conjunto que se desplaza y un segundo conjunto que se desplaza el cual está interpuesto entre el primer conjunto que se desplaza y la herramienta , los cuales están adaptados ambos para llevar a cabo movimientos lineales.
CONTROL DE REFERENCIA PARA CAMARA EN UN APARATO QUIRURGICO MINIMAMENTE INVASIVO.
(16/03/2006) Un sistema quirúrgico robotizado que comprende: un controlador maestro que tiene un dispositivo de entrada, que puede desplazarse en un espacio de trabajo del controlador; un esclavo que tiene un efector final quirúrgico y al menos una accionamiento acoplado operativamente al efector final, desplazando el accionamiento al efector final en un espacio de trabajo quirúrgico como respuesta a las señales del accionamiento del esclavo; un sistema de imágenes que incluye un dispositivo de captura de imágenes con un campo de visión que puede desplazarse en el espacio de trabajo quirúrgico, generando el sistema de imágenes señales variables de estado que indican el campo de visión; y un procesador que acopla el controlador maestro al brazo del esclavo, generando el procesador unas señales…
DISPOSICION PARA LA APLICACION DE SUSTANCIA ADHESIVA A UNA PIEZA DE TRABAJO.
(16/07/2005) Dispositivo para la aplicación de sustancia adhesiva a una pieza de trabajo, dotada de un cabezal de boquilla que presenta una boquilla de aplicación para que se pueda impulsar una sustancia adhesiva viscosa bajo presión, pudiéndose desplazar entre sí el cabezal de la boquilla y la pieza de trabajo mediante una disposición de robot , porque se puede aplicar sustancia adhesiva en forma de una tira de sustancia adhesiva , preferentemente en un chorro de rociado desde la boquilla de aplicación , a lo largo de una trayectoria de aplicación predeterminada sobre la pieza de trabajo , y encontrándose una disposición de cámara en el cabezal de boquilla o en el elemento de robot correspondiente,…
CALIBRACION DEL GUIADO VISUAL DE UN ROBOT CON DOS DISPOSITIVOS DE IMAGEN.
(01/07/2005). Ver ilustración. Solicitante/s: BAE SYSTEMS PLC. Inventor/es: ALEXANDER, RICHARD, GOOCH, RICHARD, MICHAEL.
Un método para calibrar un primer sistema de coordenadas de unos medios de orientación en un segundo sistema de coordenadas de referencia de unos medios de percepción (2a, 2b) cuando los medios de percepción están unidos de un modo sustancialmente rígido a los medios de orientación, que incluye los pasos de medir primeras posiciones de una pluralidad de primeros manantiales de luz con relación a los medios de percepción, cada uno de cuyos primeros manantiales de luz está a distancia de los medios de percepción y es o bien un manantial de luz activo, o bien un punto reflectante iluminable, correspondiendo las primeras posiciones a una primera posición absoluta de los medios de orientación, mover los medios de orientación , medir segundas posiciones de la pluralidad de primeros manantiales de luz con relación a los medios de percepción, cuyas segundas posiciones corresponden a la segunda posición absoluta de los medios de orientación.
PROCEDIMIENTO PARA CONTROLAR EL CICLO DE MONTAJE DE UNA MAQUINA DE MONTAJE DE BASTIDORES Y A UNA MAQUINA PARA LLEVAR A CABO EL PROCEDIMIENTO.
(16/12/2004). Ver ilustración. Solicitante/s: RAFFONI, GIUSEPPE. Inventor/es: RAFFONI, GIUSEPPE.
Procedimiento para controlar el ciclo de montaje de bandas para formar bastidores en máquinas de montaje que comprenden las etapas de: - leer , por medio de un escáner, la sección transversal de una de las bandas que componen el bastidor para obtener una imagen resultante de dicha sección transversal; - digitalizar la imagen resultante en formato binario; - visualizar en forma gráfica dicha sección transversal; - calcular las dimensiones de la sección transversal; - identificar los puntos adecuados para ubicar los medios de bloqueo de bandas; - determinar los puntos de aplicación de los elementos de grapado y el número de dichos elementos a aplicarse en cada punto; - activar la máquina de montaje para realizar el grapado de las bandas.
{kind=link}
{kind=link}
{kind=link}