SISTEMA Y MÉTODO PARA EL RECUBRIMIENTO CON ELASTÓMEROS Y FLUOROPOLÍMEROS DE PIEZAS Y SOPORTES METÁLICOS.
Sistema para el recubrimiento con elastómeros y fluoropolímeros de piezas y soportes metálicos de uso en aplicaciones alimentario que comprende una cabina de pintado (1) y un robot industrial (2) con una pluralidad de herramientas de pintado que se caracteriza porque comprende una mesa de apilado (7) de las piezas a recubrir,
en donde se forman pilas (12) de similares dimensiones; y en donde las piezas de la pila (12) son parametrizadas de acuerdo a sus características esenciales, ancho, largo, altura de cada pieza, velocidad de desplazamiento del cabezal de recubrimiento, tipología de la pieza, y número de piezas, en una unidad de parametrización (10) que transmite una matriz con los datos parametrizados a los medios de control (3 ,4) del robot (2), que están configurados para generar los movimientos y trayectorias en función de los parámetros recibidos.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030767.
Solicitante: UNIVERSIDAD DE CORDOBA.
Nacionalidad solicitante: España.
Inventor/es: TRUJILLO FLORES,EDUARDO, VAZQUEZ SERRANO,FRANCISCO JAVIER, GUERRERO VACAS,Guillermo, GUERRERO VACAS,Rafael Ángel, CASTRO TRIGUERO,Rafael.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/06 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › caracterizados por brazos de articulaciones múltiples.
- B25J9/16 B25J 9/00 […] › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
Fragmento de la descripción:
SISTEMA Y MÉTODO PARA EL RECUBRIMIENTO CON ELASTÓMEROS Y FLUOROPOlÍMEROS DE PIEZAS Y SOPORTES METÁLICOS
5 10 DESCRIPCIÓN El objeto de la presente invención es un método y un sistema para gobernar un robot industrial para el recubrimiento con elastómeros y fluoropolímeros de piezas y soportes metálicos, especialmente los indicados para su uso en el horneado de productos de panificación e industrias afines. ESTADO DE LA TÉCNICA ANTERIOR
15 Existen distintos antecedentes que solucionan la forma en la que se opera una pieza para el recubrimiento con elastómeros para el posicionamiento en la zona de pintado o recubrimiento o, incluso, la zona de actuación de un robot industrial. Por ejemplo, este problema técnico se soluciona desde plataformas que pivotan sobre un eje, de tal modo que las piezas pasan por la posición de trabajo del robot, por un giro de 180º, tal y como se contempla en la patente norteamericana US 4 764 077.
2 O Existen otras disposiciones en el que el robot se encuentra situado en el mismo eje de giro, de tal manera que las piezas se encuentran en plataformas que giran alrededor del robot, tal y como lo harían las "manecillas" de un reloj. Un ejemplo de esta solución se describe en la patente JP60193564.
2 5 3 O También es habitual el trabajo con dos cintas transportadoras, de tal modo que mientras en una de ellas se introducen las piezas que van a ser operadas por el robot, en la otra cinta se realizan las operaciones de descarga y carga de las nuevas piezas para que, con posterioridad, cambiar el robot a la posición de trabajo en la que se encontraba la cinta en descarga. Estas cargas se pueden disponer de forma manual o robotizada. Este antecedente se recoge en la patente japonesa JP57147468.
3 5 Otra disposición se muestra en la patente norteamericana US 4 616 593 en la que un sistema de pintura se encuentra en el extremo de un dispositivo rotatorio a modo de "noria" en la que se van posicionando las distintas estaciones.
Otras topologías de forma continua o en línea, tanto actuando el robot sobre
superficies horizontales como en superficies verticales son sobradamente
conocidas. Una de ellas se encuentra en la patente JP3021363. No obstante, estas
disposiciones, poseen el inconveniente de tener gran dificultad para adaptarse a los
cambios de tamaño y características en series discretas de piezas. Esta adaptación
5 en continuo requiere técnicas que definan, en cada caso, las características de la
pieza y que no se pueden aplicar para la aplicación en productos de panificación,
pues es un objetivo de la presente invención el abaratamiento del proceso, dado que
estos sistemas suponen un gran encarecimiento del procedimiento. Algunos
ejemplos de estos casos se muestran en las patentes japonesas J P6031213 y
1 O JP9193063. Otra forma posible es la parada de la línea y la reprogramación para las
nuevas dimensiones y propiedades de las piezas.
En la presente invención se propone que las piezas sean apiladas sobre una mesa
de referencia fija hasta alcanzar una altura suficiente para poder ser manipuladas
15 con facilidad, habitualmente la pila no supera los 1400 a 1500 mm de altura. De este
modo se garantiza el trabajo durante un periodo de tiempo suficientemente largo del
robot y se minimiza el tiempo perdido por paradas. Se desconoce por parte del
inventor, experto en la materia, de ningún sistema con las características enunciadas
a continuación.
20
EXPLICACIÓN DE LA INVENCIÓN
Las piezas o soportes que se utilizan en el horneado de productos alimentarios,
especialmente en la industria de la panificación y similares, suelen ser de formato
2 5 rectangular, habitualmente constituidas por acero inoxidable, aleaciones de aluminio
y, en ocasiones, aceros con capa superficial de aluminio, también llamados aceros
aluminizados. Suelen disponer de un marco de tubo de perfil rectangular, cuadrado u
otras secciones sobre el que se fija la superficie realmente recubierta que suele tener
un espesor comprendido entre los 0, 8 y los 2 mm. La superficie a recubrir suele estar
3 O perforada o no. La superficie puede ser completamente plana, con varias "ondas", o
con varias embuticiones de muy distintas geometrías. Estas piezas o soportes
suelen recibir, también, el nombre de bandejas, latas, moldes o simplemente chapas
de pan.
3 5 La presente invención aborda la problemática del recubrimiento de estas piezas con
un robot industrial salvando el inconveniente de la diversidad de piezas en cuanto asus dimensiones, altura, tamaño del lote, tipología, etc., resolviendo los problemas
técnicos planteados de forma económica.
Habitualmente, las series sobre las que opera un robot deben ser de tamaño medio o
alto para que el tiempo requerido en la preparación y programación del mismo se
pueda diluir durante la fase de trabajo del robot. Teniendo en cuenta la gran
5 heterogeneidad, como se ha dicho, de piezas a tratar y trabajando con series cortas,
en ocasiones menores de 20 unidades, no parece razonable emplear un robot
industrial para las aplicaciones de recubrimientos de estas piezas. Ahora bien, el
efecto técnico sorprendente respecto del actual estado de la técnica es que
soluciona esta cuestión a través de una disposición de las piezas de forma adecuada
1 O y la gestión a través de un método adecuado que permite parametrizar todas las
variables de las piezas.
Más concretamente, la presente invención, en un primer aspecto, comprende un
procedimiento para gobernar un robot industrial para la aplicación de recubrimiento
15 con elastómeros a piezas y soportes metálicos de uso en el horneado de productos
alimentarios, especialmente en el área de la industria panificadora e industrias
afines, que consiste esencialmente en apilar las piezas sobre una mesa fija y a
través de la introducción de los datos de las citadas piezas de tal modo que
modifican el programa del robot, y de este modo, los movimientos del robot,
2 O adaptándose a la geometría de las piezas apiladas. Una vez terminado el ciclo de
recubrimiento, la pieza se quita de la pila de forma manual y se ordena a través de
un pedal el comienzo de un nuevo ciclo. Los ciclos se reiteran hasta terminar de
recubrir todas las piezas apiladas.
2 5 A lo largo de la descripción y las reivindicaciones la palabra "comprende" y sus
variantes no pretenden excluir otras características técnicas o componentes. Para
los expertos en la materia, otros objetos, ventajas y características de la invención se
desprenderán en parte de la descripción y en parte de la práctica de la invención.
Los siguientes ejemplos y dibujos se proporcionan a modo de ilustración, y no se
3 O pretende que sean limitativos de la presente invención. Además, la presente
invención cubre todas las posibles combinaciones de realizaciones particulares y
preferidas aquí indicadas.
BREVE DESCRIPCIÓN DE LOS DIBUJOS
35
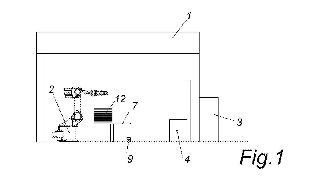
FIG 1. Muestra una vista en alzado del sistema objeto de la presente
invención.FIG 2. Muestra una vista en planta del sistema objeto de la presente invención.
FIG 3. Muestra una vista en detalle del robot industrial que forma parte del
sistema objeto de la presente invención, mostrando alguna de las
características y parámetros básicos.
5 FIG 4. Muestra una vista en detalle de la mesa de apilado que forma parte del
sistema objeto de la presente invención, mostrando sus características
y parámetros básicos.
EXPOSICION DETALLADA DE MODOS DE REALIZACIÓN
10
El recubrimiento con elastómeros de las piezas y soportes utilizados en el horneado
de productos alimentarios plantea la problemática de la diversidad de tamaños,
medidas y formas que hace muy difícil la automatización. El sistema se basa en la
creación de una pila de piezas (12) de las mismas medidas y formas que permite
15 parametrizar dichas piezas y, por tanto, cambiar con rapidez las condiciones de
trabajo del robot (2) .
El recubrimiento es aplicado por un robot industrial (2) que comprende una pluralidad
de herramientas de pintura, en la presente realización dos, fijadas en el extremo o
2 O pinza del mismo. El robot industrial (2) se encuentra dentro de una cabina de pintura
(1) que renueva el aire y filtra las partículas hacia el exterior. Un esquema de la
disposición de los elementos indicados se muestra en las FIG.1 y FIG.2.
Las piezas o soportes para horneado de panificación son transportadas hacia la
2 5 cabina de pintura (1) donde se les aplicará el recubrimiento. Una vez aquí las piezas
se amontonan y clasifican por lotes...
Reivindicaciones:
1. Sistema para el recubrimiento con elastómeros y fluoropolímeros de
piezas y soportes metálicos de uso en aplicaciones alimentarias que comprende una
5 cabina de pintado (1) y un robot industrial (2) con una pluralidad de herramientas de
pintado que se caracteriza porque comprende una mesa de apilado (7) de las
piezas a recubrir, en donde se forman pilas (12) de similares dimensiones; y en
donde las piezas de la pila (12) son parametrizadas de acuerdo a sus características
esenciales, ancho, largo, altura de cada pieza, velocidad de desplazamiento del
1 O cabezal de recubrimiento, tipología de la pieza, y número de piezas, en una unidad
de parametrización (1 O) que transmite una matriz con los datos parametrizados a los
medios de control (3, 4) del robot (2) , que están configurados para generar los
movimientos y trayectorias en función de los parámetros recibidos.
15 2. Sistema de acuerdo con la reivindicación 1 que se caracteriza porque la
mesa de apilado (7) está constituida por una retícula de pletinas entramadas y
recubierta con un fluoropolímero antiadherente.
3. Sistema de acuerdo con las reivindicaciones 1 y 2 que se caracteriza
2 O porque las piezas a apilar se situarán en la mesa de apilado (7) respecto de un
mismo punto de referencia (8) .
4. Método para el recubrimiento con elastómeros y fluoropolímeros de piezas
y soportes metálicos de uso en aplicaciones alimentarias, implementado en el
2 5 sistema de las reivindicaciones 1 a 3 que se caracteriza porque una vez realizada
la pila (12) sobre la mesa (7) y parametrizados los datos de las piezas por el
operador (15) , el robot (2) ejecuta el siguiente procedimiento, que se define por las
siguientes etapas:
(i) en una primera etapa se ordena a la cabeza del robot (2) que comprende
3 O la pistola de pintura, que se posicione a la altura máxima de la pistola, h1, y en la
vertical al punto de referencia (8) ;
(ii) en una segunda etapa, el operador (15) a través de un pedal (9) acciona
el interruptor con el pie y esto indica al robot (2) que debe comenzar a recubrirse la
pieza superior de la pila;
35 (iii) posteriormente, el cabezal de pintura se desplazará rápidamente a una
altura determinada por hvariable, en la vertical del extremo de la pieza punto de
referencia, girará el cabezal el ángulo programado (a) .
(iv) tras la etapa anterior, comenzará una pasada de recubrimiento-pintura
programada, en donde la pasada de recubrimiento se ejecutará a la velocidad
indicada por (vel) o (velf) dependiendo si es plana u ondulada; y donde inicialmente
se realiza un movimiento de una longitud (B+2b) en el sentido exterior del robot, para
5 proseguir según el lado (A) sobre una longitud de valor (p) o paso de pintura, para
seguidamente un nuevo movimiento paralelo al lado (B) de longitud (B+2b) pero en
este caso en la dirección del cuerpo del robot (2) , y posteriormente otro movimiento
de una longitud (p) hacia el operador; resultando por tanto, un movimiento en zigzag
de paso conocido como (p) , repitiéndose hasta completar la longitud (A+2a) ; y donde
1 O esta etapa se repetirá en función del parámetro (x) que corresponde con el número
de pasadas;
(v) y donde una vez terminado el recubrimiento de la pieza se cierra la válvula
de pintura; una vez cerrada, el cabezal del robot (2) se posiciona en la vertical de la
pieza correspondiente al punto de referencia a una altura k de la pieza, dejando el
15 robot (2) parado y en reposo, retirando el operario (15) la pieza recubierta e
introduciéndola en el carro (5) ;
y en donde el operador (15) acciona de nuevo el pedal (9) y comienza un
nuevo ciclo de recubrimiento, repitiéndose las operaciones 3 a 5, tantas veces como
pisos de piezas existan.
20
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]