Instalación de paletización combinada con acceso asegurado.
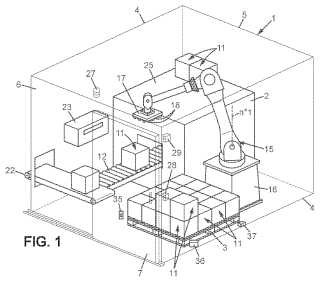
Instalación constituida por una máquina (2) de embalaje de productos (8) y por un puesto robotizado depaletización cuyo robot (15) coge las cajas (11) llenas con los citados productos a la salida de la citada máquina (2)de embalaje para disponerlas,
según un esquema apropiado, por medio de un cabezal de agarre (17), sobre un palé(3) colocado en la citada salida, estando dispuestos la citada máquina (2) de embalaje y el citado puesto depaletización en un mismo recinto (1) cerrado que está constituido por unas paredes laterales (4), una pared trasera(5) y una pared frontal (6) provista de una puerta (7) que ofrece acceso al citado puesto de paletización,caracterizada porque incluye:
- un medio de detección de intrusión (30) que se sitúa al nivel de dicha puerta (7),
- unos medios que limitan el campo de evolución del citado robot (15) en el citado recinto (1) cerrado paraconcentrar los desplazamientos de su cabezal de agarre (17) en un espacio restringido (Sr) que no invadael espacio de seguridad que se define en función de una distancia mínima medida a partir del citado mediode detección de intrusión (30), estando constituidos los citados medios de limitación del campo de evolucióndel citado robot (15) por:
- un tope, de tipo eléctrico, que limita la amplitud del movimiento del citado robot (15) alrededor de su ejeprincipal (nº 1),
- un órgano, de tipo conmutador (28), que toma nota de una petición de intervención del operario paraacceder al puesto de paletización con el fin de retirar un palé lleno de cajas (11) y de reemplazarlo por unpalé vacío,
- un mando (20) de pilotaje del citado robot (15) que gestiona la citada petición del operario para activar elcitado tope eléctrico y hacer funcionar el citado robot (15) en el citado espacio restringido (Sr) comprendidoen el interior del volumen (V) de evolución autorizado y programado al nivel del citado mando (20) depilotaje,
- al menos una zona tampón situada en el espacio restringido (Sr) en el cual interviene el robot (15) ydispuesta como una plataforma (25) para permitir, por medio del citado robot (15), un depósito provisionalde las cajas (11) fabricadas por la máquina (2) de embalaje, siendo accesible la citada plataforma (25) porel citado robot (15), estando programado el mando (20) de pilotaje del citado robot (15) de tal manera que elrobot (15) deposite provisionalmente las cajas (11) fabricadas por la máquina (2) de embalaje, durante laoperación de extracción del palé preparado y durante la puesta en posición de un nuevo palé a llenar.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09173763.
Solicitante: SIDEL PARTICIPATIONS.
Nacionalidad solicitante: Francia.
Dirección: AVENUE DE LA PATROUILLE DE FRANCE 76930 OCTEVILLE-SUR-MER FRANCIA.
Inventor/es: Mougin,Didier, ALIX,CHRISTOPHE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- B65G61/00 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › Utilización de aparatos de toma o de transferencia, o de manipuladores, para apilar o desapilar objetos no previstos en otro lugar.
- F16P3/14 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16P DISPOSITIVOS DE SEGURIDAD EN GENERAL. › F16P 3/00 Dispositivos de seguridad funcionando en conjunción con el control o la marcha de una máquina; Controles que exigen el empleo simultáneo de varias partes del cuerpo humano (F16P 5/00 tiene prioridad). › siendo los dispositivos células fotoeléctricas u otros dispositivos sensibles sin contacto mecánico.
PDF original: ES-2391698_T3.pdf
Fragmento de la descripción:
Instalación de paletización combinada con acceso asegurado
El presente invento se refiere a una instalación compuesta por, de forma combinada, un puesto robotizado de paletización de cajas de cartón y una máquina de embalaje que maneja dichas cajas y que lleva a cabo su llenado con productos preparados previamente.
De una manera general, las instalaciones robotizadas presentan, cualesquiera que sean, un carácter de peligrosidad importante para los operarios que están llamados a aproximarse al robot.
El documento EP 1 231 170 describe una instalación según el preámbulo de la reivindicación 1 que está compuesta por una máquina de embalaje de productos y por un robot que maneja las cajas llenas con productos, a la salida de la máquina de embalar para disponerlas, según un esquema apropiado, por medio de un cabezal de agarre, sobre un palé que está preparado en la citada salida.
También, para este tipo de instalación de paletización robotizada, las operaciones de salida de los palés llenos y la introducción de los palés vacíos son generalmente llevadas a cabo por medio de un transportador de tipo automático; sin embargo, una instalación tal implica la utilización de una superficie de suelo mucho más importante.
Para instalaciones compactas, como la que es objeto del invento, en las que el paletizador robotizado está combinado directamente con una máquina que realiza el embalaje de los productos, lo clásico es hacer una instalación dotada de seguridad, es decir parar el robot, cuando debe ser realizada una intervención manual por un operario, como la retirada de un palé que está lleno de cajas o como la introducción de un palé vacío, y esto durante el tiempo necesario para la operación; pero parar un robot de paletización implica también la parada de la máquina de embalaje a la que está asociado.
Estas detenciones de la máquina de embalaje provocan pérdidas de producción y pueden igualmente perturbar la producción aguas arriba, como la que lleva a cabo, por ejemplo, el etiquetado o el acondicionamiento primario de los productos.
Igualmente se conoce, tal y como se describe en el documento US 2007/211395, una instalación compuesta por un robot asociado a unos medios que permiten limitar su campo de evolución para concentrar los desplazamientos de su cabezal en un espacio restringido que no invada el espacio de seguridad.
El presente invento propone un perfeccionamiento en este tipo de instalaciones compactas que combinan una máquina de embalaje con un paletizador; permite en particular ofrecer una gran seguridad para el operario encargado de intervenir al nivel del puesto de paletización y, sobre todo, permite esta intervención del operador sin hacer obligatoria una parada de la o de las funciones que están inmediatamente aguas arriba, conservando además una superficie de suelo reducida.
La instalación según el invento está constituida por una máquina de embalaje de productos y un puesto de paletización robotizada en el que el robot maneja las cajas llenas con los citados productos a la salida de la citada máquina de embalar para disponerlas, según un esquema apropiado, por medio de un cabezal de agarre, sobre un palé preparado en la citada salida, estando dispuestos la citada máquina de embalar y el citado puesto de paletización en un mismo recinto cerrado que está constituido por unas paredes laterales, una pared trasera al nivel de la cual penetran, sobre todo, los cartones que sirven para configurar las citadas cajas, y de una pared frontal que está provista de una puerta que permite el acceso al citado puesto de paletización, incluyendo la citada instalación unos medios que limitan el campo de evolución del citado robot en el citado recinto cerrado para concentrar los desplazamientos de su cabezal de agarre en el espacio restringido que no invada el espacio de seguridad que se define al menos en función de una distancia mínima medida a partir de un medio de detección de intrusión que está situado al nivel de la abertura de la puerta de acceso al puesto de paletización, estando constituidos los medios de limitación del campo de evolución del robot por:
- un tope, de tipo eléctrico, que asegura que el robot no sale de la zona de trabajo autorizada y que limita, sobre todo, la amplitud de su movimiento alrededor de su eje principal,
- un órgano, de tipo conmutador, que tiene en cuenta una petición de intervención del operario para acceder al puesto de paletización con el fin de retirar el palé lleno de cajas y de reemplazarlo por un palé vacío,
- de un mando de pilotaje del citado robot, de tipo autómata, que gestiona la citada petición del operario para activar para activar el citado tope eléctrico y hacer funcionar el citado robot en el citado espacio restringido comprendido en el volumen de evolución autorizado y programado a nivel del citado mando de pilotaje.
Siempre según el invento, el espacio restringido en el que interviene el robot incluye al menos una zona tampón que está dispuesta como una plataforma para permitir el depósito provisional de las cajas de los productor fabricados para la máquina de embalaje, siendo accesible dicha plataforma, sobre todo, para el citado robot, durante la operación de extracción del palé preparado y durante la reposición en su sitio de una nuevo palé a llenar.
Según una forma de realización del invento, la instalación incluye, al nivel del mando de pilotaje del robot, unos medios para modificar las velocidades de evolución del robot y en particular para reducir las citadas velocidades durante su fase de funcionamiento en el espacio restringido que le ha sido reservado.
Siempre, según una forma de realización del invento, el mando de pilotaje del robot dirige igualmente el conjunto de movimientos del citado robot asegurándose así de que no sale de la zona de trabajo que está programada, es decir que este mando de pilotaje del robot incluye unos medios para definir unos espacios de trabajo en los cuales el robot está autorizado a funcionar así como unos medios para provocar su parada inmediata y total si deja estos espacios de funcionamiento autorizados.
Según otra forma de realización del invento, la instalación incluye un detector que está asociado a la puerta de acceso del palé, el cual detector autoriza, por medio del mando de pilotaje del robot, la continuación de la actividad del robot en su espacio restringido si el operario ha solicitado el acceso al puesto de paletización, o provoca la parada inmediata y total de la citada instalación en caso de ausencia de una petición de acceso o en el caso en el que la citada puerta de acceso es maniobrada antes de la recepción de la autorización de apertura que es dada por medio de una señal luminosa asociada al conmutador.
Siempre según otra forma de realización del invento, el medio de detección de una intrusión es del tipo de barrera inmaterial, y está dispuesto de forma tal que permita la introducción de un palé vacío y de tal forma que provoque la parada inmediata y total de la instalación en caso de intrusión de cualquiera en el citado espacio de seguridad.
Según otra forma de realización del invento, la instalación incluye, asociados a la barrera inmaterial, unos medios de inhibición de esta última, estando constituidos los citados medios por células fotoeléctricas para permitir la extracción del palé lleno sin provocar la parada inmediata y total de la citada instalación.
Siempre según otra forma de realización del invento, la instalación incluye unos medios de señalización del fin del ciclo de preparación de un palé con las cajas de los productos que salen de la máquina de acondicionado, estando los citados medios en forma de dispositivos luminosos.
Según otra forma de realización del invento, la instalación incluye, en el espacio restringido, uno o varios dispositivos complementarios que son accesibles a través del robot como, por ejemplo, un puesto de etiquetado de las cajas y/o una zona de recuperación y de transferencia de las cajas destinadas a desecho, estando equipada la citada zona de recuperación con una cinta transportadora para evacuar los citados desechos hacia el exterior de la instalación.
Pero el invento estará todavía más detallado con la ayuda de la descripción siguiente y de los dibujos anexos, dados a título indicativo, y en los que:
-
Reivindicaciones:
1. Instalación constituida por una máquina (2) de embalaje de productos (8) y por un puesto robotizado de paletización cuyo robot (15) coge las cajas (11) llenas con los citados productos a la salida de la citada máquina (2) de embalaje para disponerlas, según un esquema apropiado, por medio de un cabezal de agarre (17) , sobre un palé
(3) colocado en la citada salida, estando dispuestos la citada máquina (2) de embalaje y el citado puesto de paletización en un mismo recinto (1) cerrado que está constituido por unas paredes laterales (4) , una pared trasera
(5) y una pared frontal (6) provista de una puerta (7) que ofrece acceso al citado puesto de paletización, caracterizada porque incluye:
- un medio de detección de intrusión (30) que se sitúa al nivel de dicha puerta (7) ,
- unos medios que limitan el campo de evolución del citado robot (15) en el citado recinto (1) cerrado para concentrar los desplazamientos de su cabezal de agarre (17) en un espacio restringido (Sr) que no invada el espacio de seguridad que se define en función de una distancia mínima medida a partir del citado medio de detección de intrusión (30) , estando constituidos los citados medios de limitación del campo de evolución del citado robot (15) por:
- un tope, de tipo eléctrico, que limita la amplitud del movimiento del citado robot (15) alrededor de su eje principal (nº 1) ,
- un órgano, de tipo conmutador (28) , que toma nota de una petición de intervención del operario para acceder al puesto de paletización con el fin de retirar un palé lleno de cajas (11) y de reemplazarlo por un palé vacío,
- un mando (20) de pilotaje del citado robot (15) que gestiona la citada petición del operario para activar el citado tope eléctrico y hacer funcionar el citado robot (15) en el citado espacio restringido (Sr) comprendido en el interior del volumen (V) de evolución autorizado y programado al nivel del citado mando (20) de pilotaje,
- al menos una zona tampón situada en el espacio restringido (Sr) en el cual interviene el robot (15) y dispuesta como una plataforma (25) para permitir, por medio del citado robot (15) , un depósito provisional de las cajas (11) fabricadas por la máquina (2) de embalaje, siendo accesible la citada plataforma (25) por el citado robot (15) , estando programado el mando (20) de pilotaje del citado robot (15) de tal manera que el robot (15) deposite provisionalmente las cajas (11) fabricadas por la máquina (2) de embalaje, durante la operación de extracción del palé preparado y durante la puesta en posición de un nuevo palé a llenar.
2. Instalación según la reivindicación 1, caracterizada porque incluye, al nivel del mando (20) de pilotaje del robot, unos medios para modificar las velocidades de evolución del robot (15) y en particular para reducir las citadas velocidades durante la fase de funcionamiento del citado robot (15) en el espacio restringido (Sr ) que le es reservado.
3. Instalación según la reivindicación 1, caracterizada porque incluye, al nivel del mando (20) de pilotaje del robot (15) , unos medios para definir unos espacios de trabajo en los cuales el citado robot (15) está autorizado a funcionar y unos medios para provocar su parada inmediata y total si abandona los espacios de funcionamiento autorizados.
4. Instalación según la reivindicación 1, caracterizada porque incluye un detector (29) asociado a la puerta (7) que permite el acceso al puesto de paletización, cuyo detector (29) autoriza, por medio del mando (20) de pilotaje del robot (15) , la continuación de la actividad de este último en su espacio restringido (Sr ) si el operario ha solicitado el acceso al puesto de paletización, o provoca la parada inmediata y total de la citada instalación en caso de ausencia de una petición de acceso o en el caso en el que la puerta (7) esté abierta antes de la recepción de la autorización que es dada por medio de un piloto luminoso asociado al conmutador (28) .
5. Instalación según la reivindicación 1, caracterizada porque el medio de detección de una intrusión (30) es del tipo de barrera inmaterial, y está dispuesto de tal manera que permite la introducción de un palé vacío, y de tal manera que provoca la parada inmediata y total de la citada instalación en caso de intrusión del operario u otra persona.
6. Instalación según la reivindicación 5, caracterizada porque incluye, asociados a la barrera inmaterial (30) , unos medios de inhibición de esta última, estando constituidos los citados medios por células (35, 36) fotoeléctricas con el fin de permitir la extracción del palé lleno sin provocar la parada de emergencia de la citada instalación.
7. Instalación según la reivindicación 1, caracterizada porque incluye unos medios de señalización del fin del ciclo de preparación de un palé con las cajas (11) de productos que salen de la máquina (2) de acondicionado, estando dichos medios en forma de avisadores (27) luminosos.
8. Instalación según la reivindicación 1, caracterizada porque incluye, en el espacio restringido (Sr) , un dispositivo complementario accesible para el robot (15) , del tipo puesto (23) de etiquetado de las cajas.
9. Instalación según la reivindicación 1, caracterizada porque incluye, en el espacio restringido (Sr) , un dispositivo complementario accesible para el robot (15) , del tipo cinta transportadora (22) , para evacuar los desechos hacia el exterior de la instalación.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]