Control de la trayectoria de un robot que incluye un sistema y un método de vía de evacuación de emergencia.
Proceso para controlar un recorrido de un robot (R) durante una evacuación de emergencia desde un recorridoprincipal (32),
comprendiendo el proceso: proporcionar un recorrido principal para el movimiento del robot,teniendo dicho recorrido principal puntos de posición (34; 34'); mover el robot a lo largo de dicho recorridoprincipal; proporcionar un recorrido de seguridad (36; 43; 44; 45) desde cada punto de posición del recorridoprincipal para llegar, a través de al menos un punto de nivel de seguridad (33; 35), a una posición segura final(38; 1,3; 2,3; 3,3) diferente de los puntos de nivel de seguridad, estando asociado un punto de nivel deseguridad con varios de dichos puntos de posición en el recorrido principal; y mover el robot a lo largo de unode dichos recorridos de seguridad cuando se produce una situación de emergencia, de modo que el robot semueve desde uno de dichos puntos de posición, a través de los puntos de nivel de seguridad y a través dediferentes niveles de seguridad, hasta dicha posición segura final, caracterizado porque los puntos de nivel deseguridad no forman parte del recorrido principal.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06025907.
Solicitante: KUKA Laboratories GmbH.
Nacionalidad solicitante: Alemania.
Dirección: ZUGSPITZSTRASSE 140 86165 AUGSBURG ALEMANIA.
Inventor/es: Mirza,Khalid, VOLCIC,ED.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G05B19/4061 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Prevención de las colisiones o de las zonas prohibidas.
- G05B19/42 G05B 19/00 […] › Sistemas de registro y de reproducción, es decir, en los que el programa es registrado a partir de un ciclo de operaciones, p. ej. el ciclo de operaciones está controlado a mano, y a continuación este registro es reproducido en la misma máquina.
PDF original: ES-2407980_T3.pdf
Fragmento de la descripción:
Control de la trayectoria de un robot que incluye un sistema y un método de vía de evacuación de emergencia En general, la invención se refiere a sistemas de robot multieje tales como los robots según la EN ISO 8373, subsección 2.6, y más particularmente a procedimientos que proporcionan un control del recorrido del robot para una parada de emergencia que incluye vías de evacuación de emergencia para posiciones de parada de emergencia.
ANTECEDENTES DE LA INVENCIÓN
Los sistemas de control de un robot incluyen típicamente una parada de emergencia (E-Stop) para detener el robot multieje en una situación de emergencia. Normalmente, la pulsación de E-Stop hace que el robot realice una parada siguiendo la categoría 0 o 1. Incluso después de parar el robot a lo largo de su trayectoria normal, existen situaciones que requieren que el robot sea apartado del recorrido habitual a una posición segura dentro del espacio de trabajo del robot.
El documento GB 2027938 A muestra un método y un sistema para controlar el recorrido de un robot durante una evacuación de emergencia, donde se enseña y proyecta una cantidad predeterminada de recorridos de escape durante el modo de instrucción, correspondientes a una cantidad respectiva de pasos de programa designados en el programa de operación de trabajo. Estos recorridos de escape se guardan en la memoria de control y pueden ser reproducidos para retirar el brazo del robot de la zona de influencia de una pieza de trabajo en caso de emergencia cuando se llega al paso de programa correspondiente al siguiente paso de escape designado. Normalmente, las vías de escape están distanciadas entre sí aproximadamente de igual forma a lo largo de todo el programa de operación de trabajo y se leen en orden secuencial bajo el control del aparato de control manipulado. En este caso, el robot puede tener que desplazarse a lo largo de una parte relativamente larga del recorrido principal antes de llegar al siguiente punto de evacuación de emergencia.
El problema es que el usuario debe ser capaz de mover el robot desde cualquier posición del recorrido hasta una posición segura fuera del mismo sin entrar en contacto con el entorno o con robots adyacentes. El robot debe desplazarse a una posición segura de forma controlada. En estas situaciones, los operadores con poca o ninguna experiencia con robots deben ser capaces de moverlo fuera de su recorrido para la evacuación de invitados o para otros pasos adicionales. Para algunas personas puede resultar difícil utilizar un control para mover el robot manualmente sin chocar con el entorno. Esto se puede deber al tamaño del robot y su proximidad con dicho entorno.
SUMARIO DE LA INVENCIÓN
Un objeto de la invención es proporcionar un sistema de robot y un procedimiento con los que se defina una evacuación segura en base a la posición de parada del robot.
Otro objeto de la invención es un sistema de robot y un procedimiento con los que se defina una vía de evacuación segura (también denominada vía de seguridad) 36, 43, 44, 45, desde cada punto de la trayectoria normal del robot, permitiendo el uso del robot a lo largo de una trayectoria normal y, si surge la situación que requiera que el robot sea apartado fuera del recorrido a una posición segura dentro de su espacio de trabajo, esto pueda ser llevado a cabo de forma automática.
Los objetos arriba mencionados se logran mediante un procedimiento de acuerdo con las características indicadas en la reivindicación 1.
Además, dichos objetos se logran mediante un sistema de acuerdo con las características de la reivindicación 11.
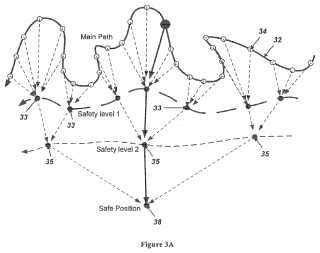
La invención se basa en el concepto de proporcionar una vía de evacuación segura desde cada punto del recorrido (también denominado recorrido principal o de desplazamiento) para llegar a una posición segura. El programador puede enseñar los puntos que forman el recorrido principal teniendo en cuenta consideraciones referentes a una vía de evacuación segura. El recorrido principal debería ser tal que en cualquier punto del mismo el robot se pueda mover con seguridad a un punto seguro. Ventajosamente, el recorrido de seguridad incluye al menos un segmento desde un punto a lo largo del recorrido de desplazamiento o segmentos desde varios puntos a lo largo del recorrido de desplazamiento hasta un punto de nivel de seguridad 1 a lo largo del recorrido de seguridad. Después, el recorrido de seguridad pasa al punto de nivel de seguridad 2 y al punto seguro (también denominado posición segura final) 38; 1, 3; 2, 3; 3, 3.
Los programadores/operadores crearán las vías de seguridad en varios puntos a lo largo del recorrido de desplazamiento. Los operadores o los operadores de robot activo pueden ejecutar un recorrido de seguridad en una situación de emergencia. Además, el personal de mantenimiento puede ejecutar un recorrido de seguridad para llevar el robot fuera de línea en caso de un problema de mantenimiento.
Cada posición del recorrido puede tener múltiples posiciones seguras asociadas donde se puede desplazar el robot. Esto se puede realizar con un único recorrido de seguridad para cada punto del recorrido principal del robot. Idealmente, para cada posición única del recorrido de desplazamiento existiría un único recorrido de seguridad. Sin embargo, con el fin de reducir la cantidad total de datos (para adaptarse a las limitaciones de memoria) , puede no resultar práctico guardar y preparar un recorrido de seguridad para cada punto del recorrido principal. Dado que estos grupos de puntos del recorrido principal del robot están asociados a un recorrido de seguridad, en concreto cuando se ejecuta el recorrido de seguridad, el primer punto del recorrido de seguridad es común a varios puntos del recorrido principal del robot. Además, dos o más recorridos de seguridad pueden compartir puntos, ventajosamente todos los recorridos de seguridad comparten el punto de seguridad final o punto de descarga.
El usuario puede crear recorridos de seguridad únicos a lo largo de todo el recorrido. Los recorridos de seguridad únicos permitirán al usuario crear recorridos especializados teniendo en cuenta obstáculos, robots adyacentes y la orientación del propio robot. Los recorridos de seguridad para grupos de posiciones en la tabla de recorridos son una propuesta que reduce la cantidad de recorridos de seguridad que el programador tendría que enseñar al robot. Una versión de esto es prever unos marcadores especiales que se pueden añadir a la tabla de recorridos indicando qué recorrido de seguridad debería estar activo para el siguiente grupo de puntos del recorrido principal o de desplazamiento. Después, durante la ejecución del recorrido principal, el sistema de control subyacente (por ejemplo el gestor de la Tabla de Recorridos) comprobará el recorrido de seguridad que está activo según la posición del robot. Cuando el usuario activa la ejecución del recorrido de seguridad actual, el robot se moverá a la posición definida por el marcador de seguridad actualmente activo.
El robot se puede mover a baja velocidad mientras ejecuta el recorrido de seguridad (cada movimiento por el recorrido de seguridad se puede ejecutar con el robot moviéndose a una velocidad muy baja) .
El programador tendrá la capacidad de enseñar cada una de las posiciones del recorrido de seguridad de modo que el robot pueda evitar todos los obstáculos. Los recorridos de seguridad han de ser enseñados manualmente después de generar el recorrido de desplazamiento. Si el recorrido de seguridad no puede ser ejecutado durante la operación del recorrido normal, el operador/personal de mantenimiento debe cambiar a modo manual para ejecutar el recorrido manual. No obstante, para cada posición a lo largo del recorrido principal debería estar disponible algún recorrido de seguridad.
Los diversos rasgos novedosos que caracterizan la invención se señalan particularmente en las reivindicaciones adjuntas que forman parte de la presente descripción. Para una mejor comprensión de la invención, sus ventajas funcionales y los objetos específicos logrados mediante su uso, se hace referencia a las figuras adjuntas y la materia descriptiva donde se ilustra una realización preferente de la invención.
BREVE DESCRIPCIÓN DE LAS FIGURAS
En las figuras:
Figura 1: diagrama de bloques esquemático que muestra el proceso de control y las características del sistema para controlar el recorrido del robot utilizando una tabla de recorridos;
Figura 2: diagrama de bloques que muestra aspectos del control de robot que utiliza la tabla de recorridos para controlar el movimiento;
Figura 3A: vista bidimensional que representa un recorrido de robot tridimensional (recorrido de desplazamiento) y... [Seguir leyendo]
Reivindicaciones:
1. Proceso para controlar un recorrido de un robot (R) durante una evacuación de emergencia desde un recorrido principal (32) , comprendiendo el proceso: proporcionar un recorrido principal para el movimiento del robot, teniendo dicho recorrido principal puntos de posición (34; 34’) ; mover el robot a lo largo de dicho recorrido principal; proporcionar un recorrido de seguridad (36; 43; 44; 45) desde cada punto de posición del recorrido principal para llegar, a través de al menos un punto de nivel de seguridad (33; 35) , a una posición segura final (38; 1, 3; 2, 3; 3, 3) diferente de los puntos de nivel de seguridad, estando asociado un punto de nivel de seguridad con varios de dichos puntos de posición en el recorrido principal; y mover el robot a lo largo de uno de dichos recorridos de seguridad cuando se produce una situación de emergencia, de modo que el robot se mueve desde uno de dichos puntos de posición, a través de los puntos de nivel de seguridad y a través de diferentes niveles de seguridad, hasta dicha posición segura final, caracterizado porque los puntos de nivel de seguridad no forman parte del recorrido principal.
2. Proceso para controlar un recorrido de un robot según la reivindicación 1, caracterizado porque el programador enseña al robot o fija puntos para formar el recorrido principal teniendo en cuenta consideraciones de vías de evacuación seguras de modo que, en cualquier punto del recorrido principal, el robot pueda ser movido de forma segura a un punto de seguridad o a una posición segura.
3. Proceso para controlar un recorrido de un robot según la reivindicación 1 o 2, caracterizado porque las vías de evacuación segura incluyen puntos de seguridad, estando cada vía de evacuación de seguridad asociada a un punto a lo largo del recorrido principal o a varios puntos a lo largo del recorrido principal y extendiéndose desde el punto o los puntos asociados hasta un punto de nivel de seguridad 1, a lo largo del recorrido de seguridad, hasta un punto de nivel de seguridad 2 a lo largo del recorrido de seguridad y hasta una posición de descarga o posición segura.
4. Proceso para controlar un recorrido de un robot según una o más de las reivindicaciones 1 a 3, caracterizado porque el robot tiene un aspecto de movimiento primario y varios ejes, cada uno con un aspecto de movimiento, definiéndose el recorrido principal en base a las posiciones de los ejes asignadas a la posición del movimiento primario a través de una tabla de recorridos.
5. Proceso para controlar un recorrido de un robot según la reivindicación 4, caracterizado porque el robot tiene una plataforma giratoria y el movimiento primario es el movimiento de la plataforma giratoria con una única posición prevista para cada posición de la plataforma giratoria en base a una resolución del codificador de plataforma giratoria que supervisa la posición de ésta.
6. Proceso para controlar un recorrido de un robot según una o más de las reivindicaciones 1 a 5, que comprende:
mover un punto de referencia de un elemento terminal a lo largo de un recorrido principal definido por puntos de posición;
definir múltiples recorridos de seguridad mediante puntos de posición, asociándose cada uno de los puntos de posición del recorrido principal a uno de los recorridos de seguridad;
si es necesario retirar el robot del recorrido principal, mover el robot a lo largo de uno de los recorridos de seguridad según un punto de posición actual del robot a lo largo del recorrido principal.
7. Proceso según la reivindicación 6, caracterizado porque el recorrido principal está definido con marcadores de seguridad asociados a algunos de los puntos de posición, estando asociados los recorridos de seguridad con los marcadores de seguridad y seleccionándose uno de los recorridos de seguridad para el paso de movimiento del robot a lo largo de uno de los recorridos de seguridad según la proximidad de la posición actual a los marcadores de seguridad.
8. Proceso según cualquiera de las reivindicaciones 1 a 7, caracterizado porque el robot se mueve a lo largo del recorrido principal en base a un aspecto de movimiento del robot, denominado movimiento primario, con una sincronía de movimiento de los ejes del robot con el movimiento primario, estando asignadas las posiciones de los ejes a la posición del movimiento primario a través de una tabla de recorridos para definir el recorrido principal.
9. Proceso según la reivindicación 8, caracterizado porque los movimientos de los ejes del robot incluyen un movimiento de ejes secundario cuando el robot se mueve a lo largo del recorrido principal, incluyendo la sincronización del movimiento de los ejes secundarios con el movimiento primario el uso de codificadores de posición previstos en el recorrido de una plataforma giratoria como un movimiento primario.
10. Proceso según cualquiera de las reivindicaciones 1 a 9, caracterizado porque la necesidad de retirar el robot del recorrido principal incluye detener la plataforma giratoria o una parada de emergencia forzada de la
plataforma giratoria antes de mover el robot a lo largo de uno de los recorridos de seguridad de acuerdo con el punto de posición actual del robot a lo largo del recorrido principal.
11. Sistema de control de recorrido de robot multieje que comprende:
dispositivos de memoria de sistema para almacenar datos;
un robot multieje con plataforma giratoria;
una unidad de control para mover un punto de referencia de un elemento terminal a lo largo de un recorrido principal (32) definido por puntos de posición (34; 34’) almacenados en dichos dispositivos de memoria; y múltiples recorridos de seguridad (36; 43; 44; 45) almacenados en dichos dispositivos de memoria, estando asociado cada uno de los puntos de posición del recorrido principal a uno de los recorridos de seguridad, estando la unidad de control adaptada para, si es necesario, retirar el robot del recorrido principal, mover el robot a lo largo de los recorridos de seguridad desde los puntos de posición del recorrido principal para llegar al menos a una posición segura final (38; 1, 3; 2, 3; 3, 3) , y estando adaptada la unidad de control para, en caso de emergencia, mover el robot a lo largo de uno de varios recorridos de seguridad desde uno de dichos puntos de posición, a través de al menos un punto de nivel de seguridad (33, 35) diferente de la posición segura final, hasta dicha posición segura final, y estando asociado un punto de nivel de seguridad con varios de dichos puntos de posición del recorrido principal, caracterizado porque los puntos de nivel de seguridad no forman parte del recorrido principal.
12. Sistema según la reivindicación 11, caracterizado porque el recorrido principal está definido con marcadores de seguridad asociados a algunos de los puntos de posición, estando asociados los recorridos de seguridad a los marcadores de seguridad y seleccionándose uno de los recorridos de seguridad para mover el robot a lo largo de uno de los recorridos de seguridad según la proximidad de la posición actual a los marcadores de seguridad.
13. Sistema según la reivindicación 11 o 12, caracterizado porque el robot se mueve a lo largo del recorrido principal en base a un aspecto de movimiento del robot, denominado movimiento primario, con una sincronización de movimientos de los ejes del robot con el movimiento primario, estando asignadas las posiciones de los ejes a la posición del movimiento primario a través de una tabla de recorridos para definir el recorrido principal.
14. Sistema según la reivindicación 13, caracterizado porque los movimientos de los ejes del robot incluyen un movimiento de ejes secundario cuando el robot se mueve a lo largo del recorrido principal, incluyendo la sincronización del movimiento de los ejes secundarios con el movimiento primario el uso de codificadores de posición previstos en el recorrido de una plataforma giratoria como un movimiento primario.
15. Sistema según la reivindicación 14, caracterizado porque la necesidad de retirar el robot del recorrido principal incluye detener la plataforma giratoria o una parada de emergencia forzada de la plataforma giratoria antes de mover el robot a lo largo de uno de los recorridos de seguridad de acuerdo con el punto de posición actual del robot a lo largo del recorrido principal.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]