Robot trepador equipado con una unidad de trabajo, y sistema de control de tales robots trepadores.
Robot trepador equipado con una unidad de trabajo, del tipo que comprende:
un chasis (1), el cual tiene referenciados imaginariamente tres ejes coordenados X, Y, Z, en el que el eje Xestá alineado con una dirección de avance de dicho chasis (1) y el eje Z está dirigido hacia una superficiede trabajo (S) sobre la que se desplaza el robot:
un primer conjunto de patas (2a, 2b) montado de manera desplazable linealmente en la dirección del eje Xrespecto al chasis (1) y provisto de un primer dispositivo de acoplamiento por succión (3) adaptado paraacoplar intermitentemente dicho primer conjunto de patas (2a, 2b) a la superficie de trabajo (S), estandocada pata (2a, 2b) del primer conjunto de patas (2a, 2b) montada de manera extensible en la dirección deleje Z hacia la superficie de trabajo (S), y retraíble de la misma, respecto al chasis (1);
un segundo conjunto de patas (4) montado de manera giratoria alrededor de un eje paralelo al eje Zrespecto al chasis (1) y provisto de un segundo dispositivo de acoplamiento por succión (5) adaptado paraacoplar intermitentemente dicho segundo conjunto de patas (4) a la superficie de trabajo (S);primeros y segundos medios de activación conectados a una fuente de aspiración para activarselectivamente dichos primer y segundo dispositivos de acoplamiento por succión (3, 5);
primeros medios de accionamiento para desplazar linealmente el primer conjunto de patas (2a, 2b) respectoal chasis (1);
segundos medios de accionamiento para accionar individualmente una extensión o retracción de cada pata(2a, 2b) del primer conjunto de patas (2a, 2b) respecto al chasis (1);
terceros medios de accionamiento para hacer girar el segundo conjunto de patas (4) respecto al chasis (1);y
medios de control adaptados para controlar el funcionamiento de dichos primeros y segundos medios deactivación y dichos primeros, segundos y terceros medios de accionamiento de manera coordinada paradesplazar el chasis (1) en cualquier dirección sobre la superficie de trabajo (S), en el que cada uno dedichos primeros dispositivos de acoplamiento por succión (3, 5) comprende al menos dos ventosas (6)unidas a un soporte basculante (7) unido articuladamente a un extremo de la correspondiente pata (2a, 2b)del primer conjunto de patas (2a, 2b) de manera que puede bascular libremente respecto a un eje (8)paralelo al eje Y;
a cada soporte basculante (7) está unido un pie (9) situado entre dichas dos ventosas (6) y configurado ydispuesto para apoyar sobre la superficie de trabajo (S) cuando las dos ventosas (6) están acopladas a lasuperficie de trabajo (S);
al menos el primer y segundo elementos sensores (10, 11) están dispuestos respectivamente en el primer ysegundo puntos separados del chasis (1) para detectar la distancia en la dirección del eje Z desde cada unode dichos primer y segundo puntos del chasis (1) a la superficie de trabajo (S) y enviar unas señalesrepresentativas de dichas distancias a dichos medios de control;de acuerdo con dichas señales el primer y segundo elementos sensores (10, 11), el medio de controlcontrola el funcionamiento de los segundos medios de accionamiento para nivelar el chasis (1) en relacióncon la superficie de trabajo (S),
sobre el chasis (1) está instalado un dispositivo de soporte móvil que soporta una unidad de trabajo provistade un cabezal (19) dispuesto para trabajar en la superficie de trabajo (S) a través de una abertura (12)existente en el chasis (1), incluyendo dicho dispositivo de soporte móvil medios de guía y medios deaccionamiento para desplazar al menos dicho cabezal (19) en las direcciones de los tres ejes coordenadosX, Y, Z y pivotar el cabezal (19) alrededor de dos ejes X, Y dentro de la abertura (12); y
caracterizado por que el primer conjunto de patas (2a, 2b) tiene un subconjunto de patas delanteras (2a) yun subconjunto de patas traseras (2b), y por que las patas de uno de dichos subconjuntos de patasdelanteras y traseras está montado sobre respectivos dispositivos de guía (13) para un desplazamientolineal en la dirección del eje X respecto a las patas del otro de los subconjuntos de patas delanteras ytraseras, y miembros elásticos (14) están dispuestos para empujar en direcciones opuestas cada pata haciauna zona media de dicho dispositivo de guía, efectuándose dichos desplazamientos de las patas librementecontra la fuerza de dichos miembros elásticos (14) con el fin de acomodar una variación en la distanciaentre los subconjuntos de patas delanteras y traseras (2a, 2b) producida como consecuencia de dichanivelación del chasis (1) cuando los primeros dispositivos de acoplamiento por succión (3) están activados.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07380116.
Solicitante: AIRBUS OPERATIONS, S.L.
Nacionalidad solicitante: España.
Inventor/es: RAMALLO GUTIERREZ,JOSE LUIS, Montero Sanjuan,Pedro.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21J15/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21J FORJADO; MARTILLADO; PRENSADO DE METALES; REMACHADO; HORNOS DE FORJA (laminado de metales B21B; fabricación de productos particulares por forjado o prensado B21K; chapeado B23K; tratamiento o acabado de superficies por martillado B23P 9/04; aumento de la compacidad de superficies por chorro de materiales en partículas B24C 1/10; características generales de las prensas, prensas para compactar los residuos B30B; hornos en general F27). › B21J 15/00 Remachado. › especialmente adaptadas al remachado de piezas determinadas, p. ej. máquinas para poner guarniciones de frenos.
- B23B41/00 B […] › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23B TORNEADO; TALADRADO (usando un electrodo en lugar de una herramienta B23H, p.ej. haciendo agujeros B23H 9/14; trabajando con un haz de laser B23K 26/00; dispositivos para copiar o controlar B23Q). › Máquinas o dispositivos para escariar o taladrar especialmente adaptados para un trabajo particular; Accesorios especialmente concebidos a estos fines.
- B23Q9/00 B23 […] › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › Dispositivos para el soporte o el guiado de aparatos o máquinas portátiles para el trabajo del metal (para el aterrajado de tubos B23B 41/08; especialmente concebidos para la perforación B23B 45/14).
- B25J9/16 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- B62D57/024 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › Vehículos de orugas especialmente adaptados para desplazarse sobre superficies inclinadas o verticales (vehículos oruga para subir o bajar escaleras B62D 55/075; coches que permiten subir o bajar un tramo de escalera B62B 5/02).
- B62D57/032 B62D 57/00 […] › con una base de sustentación y patas elevadas alternativamente o en un orden determinado; con pies o patines elevados alternativamente o en un orden determinado (B62D 57/024 tiene prioridad).
- B64F5/00 B […] › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64F INSTALACIONES EN TIERRA O INSTALACIONES EN CUBIERTA DE PORTAAVIONES ESPECIALMENTE ADAPTADAS PARA SU USO EN CONEXIÓN CON AERONAVES; DISEÑO, FABRICACIÓN, ENSAMBLAJE, LIMPIEZA, MANTENIMIENTO O REPARACIÓN DE AERONAVES, NO PREVISTOS EN OTRO LUGAR; MANIPULACIÓN, TRANSPORTE, ENSAYO O INSPECCIÓN DE COMPONENTES DE AERONAVES, NO PREVISTOS EN OTRO LUGAR. › Diseño, fabricación, ensamblado, limpieza, mantenimiento o reparación de aeronaves, no previstos en otro lugar; Manipulación, transporte, ensayo o inspección de componentes de aeronaves, no previstos en otro lugar.
PDF original: ES-2386737_T3.pdf
Fragmento de la descripción:
Robot trepador equipado con una unidad de trabajo, y sistema de control de tales robots trepadores
5 Campo de la técnica
La presente invención se refiere a un robot trepador equipado con una unidad de trabajo, siendo dicho robot capaz de desplazarse sobre una superficie lisa curvada, posicionarse en diferentes lugares de trabajo predeterminados de dicha superficie y realizar un trabajo en uno o más sitios de operación en cada uno de dichos lugares de trabajo. La presente invención se refiere también a un equipo de gobierno de tales robots que incluye al menos un primer robot adaptado para realizar una o más etapas precedentes de dicho trabajo en los sitios predeterminados y un segundo robot adaptado para realizar posteriormente una o más etapas subsiguientes del trabajo en los mismos sitios predeterminados, estando ambos primer y segundo robots gobernados por unos medios de control para desplazarse y trabajar coordinadamente sobre la superficie de trabajo.
En general, el robot trepador y el equipo de robots trepadores de la presente invención tienen aplicación en cualquier sector industrial y, en particular, en el campo de la aeronáutica.
Estado de la técnica
En varios campos de la técnica existe la necesidad de disponer de robots trepadores capaces de trepar por superficies lisas fuertemente inclinadas, verticales o incluso desplomadas. Se conocen numerosos robots provistos de ventosas adaptadas para trepar, por ejemplo, por fachadas acristaladas de edificios con el propósito de efectuar tareas de limpieza o similares. Sin embargo, cuando las superficies de trabajo son curvadas, el desplazamiento de
tales robots sobre las mismas presenta una problemática considerablemente mayor.
La solicitud de patente invención WO 94/26540 describe un robot provisto de bandas de rodadura sinfín de tipo "oruga" equipadas con ventosas adaptadas para acoplarse a la superficie de trabajo a medida que las bandas sinfín van rodando. Este robot trepador está destinado a efectuar inspecciones no destructivas y operaciones de limpieza sobre superficies exteriores de aeronaves. Las superficies exteriores de una aeronave son curvadas y a menudo tienen dos o más direcciones de curvatura. Para efectuar virajes, los vehículos equipados con bandas sinfín en general deben mover las dos bandas a velocidades diferentes o en direcciones opuestas, y las bandas sinfín patinan sobre el suelo durante el viraje. Un inconveniente que presentan los robots equipados con bandas sinfín y ventosas unidas a las mismas es la dificultad de efectuar virajes a causa de la resistencia que oponen las ventosas a patinar
cuando están acopladas a la superficie.
La solicitud de patente US-A-5.468.099 describe también las bandas de rodadura sinfín de tipo “oruga” (correas de transmisión) antes mencionadas provistas de ventosas. Como una realización alternativa, dicha solicitud de patente de Estados Unidos describe una máquina de acuerdo con el preámbulo de la reivindicación 1, que incluye un marco de soporte periférico que se soporta en la superficie por cuatro conjuntos de ventosas variables en altura. Cada conjunto de ventosa tiene un servomotor que puede mover las patas hacia arriba o hacia abajo (eje Z) . La máquina incluye también una plataforma montada en el marco para girar alrededor de un eje vertical. La máquina incluye además una gran abertura cuadrada en el medio de la plataforma. A lo largo de los lados opuestos de la abertura existen correderas que soportan un carro intermedio. La expresión carro intermedio incluye un carro interno que a su
45 vez tiene un cabezal de taladrado que está montado para pivotar sobre al menos un eje horizontal y, también preferiblemente, sobre un segundo eje normal. El movimiento del cabezal de taladrado representa, en términos generales, el movimiento de un marco giratorio dentro de un marco deslizable, que también se conoce a partir de la solicitud de patente DE4237773A1. Para ello, el documento DE4237773A1 describe un robot caminante que comprende un miembro alargado en X y un miembro alargado en Y para mover el cuerpo móvil en la dirección X y en la dirección Y. Siendo ambos miembros alargados capaces de extenderse y acortarse en longitud en una dirección Z perpendicular a las direcciones X e Y.
La patente US-A-6105695 describe un robot trepador previsto para tareas de detección de desperfectos e inspección de reparaciones en aeronaves, aunque también es aplicable al manejo de materiales peligrosos, tales como tóxicos 55 y explosivos. Este robot incorpora un sistema de locomoción por pasos que comprende una plataforma, un primer conjunto de patas montado de manera desplazable linealmente respecto a la plataforma y provisto de un primer dispositivo de acoplamiento por succión adaptado para acoplar intermitentemente dicho primer conjunto de patas a la superficie de trabajo, y un segundo conjunto de patas montado de manera giratoria y desplazable linealmente respecto a la plataforma y provisto de un segundo dispositivo de acoplamiento por succión adaptado para acoplar intermitentemente dicho segundo conjunto de patas a la superficie de trabajo. Cada pata del primer y segundo conjuntos de patas está montada de manera extensible hacia la superficie de trabajo, y retraíble de la misma. El robot incluye medios de accionamiento para mover los conjuntos de patas respecto a la plataforma y medios de activación conectados a una fuente de aspiración para activar selectivamente dichos primer y segundo dispositivos de acoplamiento por succión, cada uno de los cuales comprende una o más ventosas. El robot incluye medios de 65 control adaptados para controlar el funcionamiento de los medios de activación y de los medios de accionamiento de manera coordinada para desplazar la plataforma en cualquier dirección sobre la superficie de trabajo. El sistema de
locomoción es el siguiente. Cuando las ventosas, supongamos, del primer conjunto de patas están acopladas a la superficie de trabajo, el segundo conjunto de patas se desacopla, se retrae y se desplaza linealmente respecto a la plataforma. Entonces, el segundo conjunto de patas se extiende y sus ventosas se acoplan a la superficie de trabajo. A continuación, las ventosas del primer conjunto de patas se desacoplan, el primer conjunto de patas se retrae y se
desplaza linealmente respecto a la plataforma, y seguidamente el primer conjunto de patas se extiende y sus ventosas se acoplan a la superficie de trabajo, completando con ello un paso y dejando el robot preparado para el paso siguiente que es una repetición del anterior. Los virajes se efectúan girando el segundo conjunto de patas respecto a la plataforma cuando las ventosas de un único conjunto de patas están acopladas a la superficie de trabajo.
El sistema de locomoción por pasos descrito en la citada patente US-A-6105695 tiene un precedente en una plataforma "caminadora" utilizable para desplazar grandes cargas por un suelo plano, descrito en la patente US-A4321976.
Sin embargo, la citada patente US-A-6105695, no describe ningún sistema específico para nivelar la plataforma del robot en relación con una superficie de trabajo que es curvada, ni para posicionar con precisión una unidad de trabajo llevada por el robot en relación con un sitio de operación en un lugar de trabajo sobre dicha superficie de trabajo curvada.
En la industria de la construcción aeronáutica existe la necesidad de disponer de robots capaces de trepar sobre superficies de un fuselaje o parte de un fuselaje, u otras partes de una aeronave en construcción para realizar trabajos sobre las mismas. Uno de los trabajos a realizar habitualmente consiste en unir dos o más paneles parcialmente superpuestos mediante remaches, lo que implica realizar en primer lugar unos taladros, posiblemente escariados y avellanados, y después insertar y fijar los remaches en los taladros. Este trabajo requiere disponer de
al menos de un cabezal de taladrado y un cabezal de colocación y fijación de remaches. Estos cabezales, en el momento de efectuar el trabajo, deben estar lo más perpendiculares posible al sitio de la superficie de trabajo donde se requiere efectuar la operación. En una superficie de trabajo curvada en una, dos o más direcciones, la posición de los cabezales de trabajo debe ser perpendicular a un plano tangente a la superficie de trabajo en el sitio de operación.
La presente invención tiene por objeto contribuir a satisfacer la mencionada necesidad de la industria de la construcción... [Seguir leyendo]
Reivindicaciones:
1. Robot trepador equipado con una unidad de trabajo, del tipo que comprende:
un chasis (1) , el cual tiene referenciados imaginariamente tres ejes coordenados X, Y, Z, en el que el eje X está alineado con una dirección de avance de dicho chasis (1) y el eje Z está dirigido hacia una superficie de trabajo (S) sobre la que se desplaza el robot: un primer conjunto de patas (2a, 2b) montado de manera desplazable linealmente en la dirección del eje X respecto al chasis (1) y provisto de un primer dispositivo de acoplamiento por succión (3) adaptado para acoplar intermitentemente dicho primer conjunto de patas (2a, 2b) a la superficie de trabajo (S) , estando cada pata (2a, 2b) del primer conjunto de patas (2a, 2b) montada de manera extensible en la dirección del eje Z hacia la superficie de trabajo (S) , y retraíble de la misma, respecto al chasis (1) ; un segundo conjunto de patas (4) montado de manera giratoria alrededor de un eje paralelo al eje Z respecto al chasis (1) y provisto de un segundo dispositivo de acoplamiento por succión (5) adaptado para
acoplar intermitentemente dicho segundo conjunto de patas (4) a la superficie de trabajo (S) ; primeros y segundos medios de activación conectados a una fuente de aspiración para activar selectivamente dichos primer y segundo dispositivos de acoplamiento por succión (3, 5) ; primeros medios de accionamiento para desplazar linealmente el primer conjunto de patas (2a, 2b) respecto al chasis (1) ; segundos medios de accionamiento para accionar individualmente una extensión o retracción de cada pata (2a, 2b) del primer conjunto de patas (2a, 2b) respecto al chasis (1) ; terceros medios de accionamiento para hacer girar el segundo conjunto de patas (4) respecto al chasis (1) ; y medios de control adaptados para controlar el funcionamiento de dichos primeros y segundos medios de
activación y dichos primeros, segundos y terceros medios de accionamiento de manera coordinada para desplazar el chasis (1) en cualquier dirección sobre la superficie de trabajo (S) , en el que cada uno de dichos primeros dispositivos de acoplamiento por succión (3, 5) comprende al menos dos ventosas (6) unidas a un soporte basculante (7) unido articuladamente a un extremo de la correspondiente pata (2a, 2b) del primer conjunto de patas (2a, 2b) de manera que puede bascular libremente respecto a un eje (8) paralelo al eje Y; a cada soporte basculante (7) está unido un pie (9) situado entre dichas dos ventosas (6) y configurado y dispuesto para apoyar sobre la superficie de trabajo (S) cuando las dos ventosas (6) están acopladas a la superficie de trabajo (S) ; al menos el primer y segundo elementos sensores (10, 11) están dispuestos respectivamente en el primer y
segundo puntos separados del chasis (1) para detectar la distancia en la dirección del eje Z desde cada uno de dichos primer y segundo puntos del chasis (1) a la superficie de trabajo (S) y enviar unas señales representativas de dichas distancias a dichos medios de control; de acuerdo con dichas señales el primer y segundo elementos sensores (10, 11) , el medio de control controla el funcionamiento de los segundos medios de accionamiento para nivelar el chasis (1) en relación con la superficie de trabajo (S) , sobre el chasis (1) está instalado un dispositivo de soporte móvil que soporta una unidad de trabajo provista de un cabezal (19) dispuesto para trabajar en la superficie de trabajo (S) a través de una abertura (12) existente en el chasis (1) , incluyendo dicho dispositivo de soporte móvil medios de guía y medios de accionamiento para desplazar al menos dicho cabezal (19) en las direcciones de los tres ejes coordenados
45 X, Y, Z y pivotar el cabezal (19) alrededor de dos ejes X, Y dentro de la abertura (12) ; y caracterizado por que el primer conjunto de patas (2a, 2b) tiene un subconjunto de patas delanteras (2a) y un subconjunto de patas traseras (2b) , y por que las patas de uno de dichos subconjuntos de patas delanteras y traseras está montado sobre respectivos dispositivos de guía (13) para un desplazamiento lineal en la dirección del eje X respecto a las patas del otro de los subconjuntos de patas delanteras y traseras, y miembros elásticos (14) están dispuestos para empujar en direcciones opuestas cada pata hacia una zona media de dicho dispositivo de guía, efectuándose dichos desplazamientos de las patas libremente contra la fuerza de dichos miembros elásticos (14) con el fin de acomodar una variación en la distancia entre los subconjuntos de patas delanteras y traseras (2a, 2b) producida como consecuencia de dicha nivelación del chasis (1) cuando los primeros dispositivos de acoplamiento por succión (3) están activados.
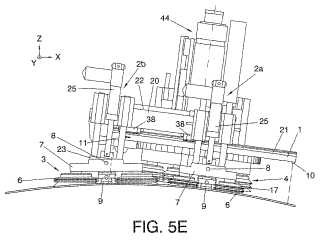
2. Robot, de acuerdo con la reivindicación 1, en el que dichos subconjuntos de patas delanteras y traseras (2a, 2b) tienen dos patas en cada lado del chasis (1) , estando las patas delanteras (2a) y las patas traseras (2b) de cada lado montadas sobre un soporte deslizante (20) acoplado al chasis (1) mediante un dispositivo de guía lineal (21) en la dirección del eje X y conectado a un actuador lineal (22) .
3. Robot, de acuerdo con la reivindicación 2, en el que cada pata delantera y trasera (2a, 2b) de los subconjuntos de patas delanteras y traseras (2a, 2b) comprende un soporte móvil (23) al que está unido articuladamente dicho soporte basculante (7) , estando dicho soporte móvil (23) acoplado al chasis (1) mediante un dispositivo de guía lineal (24) en la dirección del eje Z y conectado a un actuador lineal (25) .
4. Robot, de acuerdo con la reivindicación 1, en el que cada uno de dichos pies (9) está unido al correspondiente
soporte basculante (7) mediante una articulación alrededor de un eje (15) paralelo al eje X.
5. Robot, de acuerdo con la reivindicación 1, en el que cada uno de dichos pies (9) está asociado a un sensor de
contacto (16) capaz de enviar una señal representativa de la existencia o no existencia de contacto entre el pie (9) y 5 la superficie de trabajo (S) a los medios de control.
6. Robot, de acuerdo con la reivindicación 1, en el que el segundo dispositivo de acoplamiento por succión (5) del segundo conjunto de patas (4) comprende una pluralidad de ventosas (17) instaladas en un soporte anular giratorio
(18) acoplado al chasis (1) mediante un dispositivo de guía giratorio alrededor del eje Z y conectado a un motor (27) ,
teniendo dicho soporte anular giratorio (18) y dicho dispositivo de guía giratorio unas respectivas aberturas centrales dispuestas para abarcar en su interior la abertura (12) existente en el chasis (1) .
7. Robot, de acuerdo con la reivindicación 6, en el que la abertura (12) , así como dichos medios de guía de dicho dispositivo de soporte móvil, están dimensionados para permitir unos desplazamientos del cabezal (19) en las
direcciones de los ejes X, Y dentro de la abertura (12) suficientemente amplios como para efectuar trabajos en uno o más puntos diferentes de la superficie de trabajo (S) sin necesidad de efectuar desplazamientos del chasis (1) en relación con la superficie de trabajo (S) .
8. Robot, de acuerdo con la reivindicación 7, en el que dichos medios de accionamiento del dispositivo de soporte
móvil están adaptados para posicionar un eje de trabajo del cabezal (19) en relación con la estructura (S) con una precisión de ± 0, 1 mm o superior en las direcciones de los ejes X, Y, Z y para inclinar dicho eje de trabajo del cabezal (19) en relación con la estructura (S) con una precisión de ± 40" o superior respecto al eje Z.
9. Robot, de acuerdo con la reivindicación 1, en el que en el chasis (1) y/o en el dispositivo de soporte móvil que
soporta dicha unidad de trabajo está instalado un dispositivo de detección de marcas en comunicación con dichos medios de control para efectuar un seguimiento de marcas sobre la superficie de trabajo (S) .
10. Robot, de acuerdo con la reivindicación 1, en el que en el chasis (1) y/o en el dispositivo de soporte móvil que soporta dicha unidad de trabajo está instalado un receptor-emisor en comunicación con un sistema de
posicionamiento global de interior, estando dicho receptor-emisor adaptado para enviar unas señales representativas de la posición del receptor-emisor en relación con dicho sistema de posicionamiento global de interior a dichos medios de control para un guiado de los desplazamientos del chasis (1) sobre la superficie de trabajo (S) .
11. Robot de acuerdo con la reivindicación 1, en el que dichas ventosas (6) se encuentran unidas articuladamente a dicho soporte basculante (7) de cada uno de dichos primeros dispositivos de acoplamiento por succión (3) , de manera que pueden bascular libre e independientemente respecto al soporte basculante (7) al menos con un primer grado de libertad alrededor de un primer eje (103) .
12. Robot de acuerdo con la reivindicación 11, en el que dichas ventosas (6) se encuentran unidas articuladamente a dicho soporte basculante (7) de cada uno de dichos primeros dispositivos de acoplamiento por succión (3) , de manera que pueden bascular libre e independientemente respecto al soporte basculante (7) con un segundo grado de libertad alrededor de un segundo eje (102) .
45 13. Robot de acuerdo con la reivindicación 12, en el que dicho segundo eje (102) es perpendicular a dicho primer eje (103) .
14. Robot de acuerdo con la reivindicación 12, ó 13, en el que dicho primer eje (103) es paralelo al eje Y cuando la
ventosa (6) a la que se encuentra asociado está en una posición de no basculación respecto a dicho segundo eje 50 (102) .
15. Robot de acuerdo con la reivindicación 14, en el que cada una de dichas ventosas (6) se encuentra fijada por su extremo superior a un apéndice de soporte (101) , parte del cual se encuentra insertado en un marco (100) introducido en una cavidad de dicho soporte basculante (7) , y unida a dicho marco (100) mediante dicho primer eje
55 (103) , que emerge de dicha pieza de soporte (101) y se encuentra dispuesto perpendicularmente y fijado por sus extremos a unas respectivas paredes de dicho marco (100) , de manera que permite la basculación de dicha pieza de soporte (101) , y con ésta la de la ventosa (6) , respecto al marco (100) alrededor del primer eje (103) .
16. Robot de acuerdo con la reivindicación 15, en el que dicho marco (100) se encuentra unido a dicho soporte
60 basculante (7) mediante dicho segundo eje (102) , el cual se encuentra dispuesto perpendicularmente y fijado por sus extremos a una respectivas paredes de dicho soporte basculante (7) delimitadoras de dicha cavidad, de manera que permite la basculación del marco (100) , y con éste la de la ventosa (6) , respecto al miembro de soporte (7) , alrededor del segundo eje (102) .
65 17. Robot de acuerdo con la reivindicación 16, en el que comprende al menos un elemento de resorte (R) fijado por un extremo al marco (100) y por el otro a una pared delimitadora de dicha cavidad del soporte basculante (7) , de manera que dicho elemento de resorte (R) actúa contra el movimiento de basculación en un sentido del marco (100) respecto al segundo eje (102) .
18. Robot de acuerdo con la reivindicación 6, en el que dicha pluralidad de ventosas (17) de dichos segundos dispositivos de acoplamiento por succión (5) se encuentran instaladas por parejas en varios bloques (32) unidos a dicho soporte anular giratorio (18) .
19. Robot de acuerdo con la reivindicación 18, en el que cada uno de dichos bloques (32) comprende una primera pieza (32a) fijada firmemente al soporte anular giratorio (18) , y una segunda pieza (32b) , a la que se encuentran unidas dos de dichas ventosas (17) , unida articuladamente a dicho primera pieza (32a) , de manera que puede bascular libremente respecto a un tercer eje (105) contenido en un plano paralelo al del soporte anular giratorio (18) .
20. Robot de acuerdo con la reivindicación 19, en el que cada uno de dichos bloques (32) comprende dos terceras piezas (32c) cada una de ellas unida a un extremo superior de una respectiva ventosa (17) por su extremo superior, estando cada pareja de dichas terceras piezas (32c) unida de manera articulada libre e independientemente respecto a la segunda pieza (32b) , al menos con un primer grado de libertad alrededor de un cuarto eje (106) perpendicular a dicho tercer eje (105) .
21. Robot de acuerdo con la reivindicación 20, en el que cada una de dichas ventosas (17) se encuentra unida de manera articulada a una de dichas terceras piezas (32c) a través de un quinto eje (107) perpendicular a dicho cuarto eje (106) .
22. Equipo de robots trepadores que incluye una pluralidad de robots trepadores de acuerdo con cualquiera de las reivindicaciones 1 a 21, en el que cada robo trepados está equipado de una unidad de trabajo.
23. Equipo de robots trepadores, de acuerdo con la reivindicación 22, en el que dicho equipo comprende al menos un primer robot equipado con una primera unidad de trabajo adaptada para efectuar una o más etapas precedentes 30 de un trabajo y un segundo robot equipado con una segunda unidad de trabajo adaptada para efectuar una o más etapas subsiguientes de dicho trabajo, estando dichos medios de control adaptados para desplazar dicho primer robot hasta un lugar de trabajo predeterminado, o consecutivamente hasta varios lugares de trabajo predeterminados sobre la superficie de trabajo y efectuar en uno o más sitios de operación comprendidos en cada uno de dichos lugares de trabajo las mencionadas una o más etapas precedentes y para desplazar
subsiguientemente dicho segundo robot hasta el mismo lugar de trabajo o hasta los mismos lugares de trabajo y efectuar en dichos uno o más sitios de operación comprendidos en cada uno de los lugares de trabajo dichas una o más etapas subsiguientes.
24. Equipo de robots, de acuerdo con la reivindicación 23, en el que dicho trabajo comprende unir al menos dos 40 paneles mediante remaches.
25. Equipo de robots, de acuerdo con la reivindicación 24, en el que dicha primera unidad de trabajo llevada por el primer robot comprende al menos un cabezal de taladrado, escariado y avellanado, y dicha segunda unidad de trabajo llevada por el segundo robot comprende al menos un cabezal de colocación y fijación de remaches.
26. Equipo de robots, de acuerdo con la reivindicación 25, en el que dicha primera unidad de trabajo llevada por el primer robot comprende un dispositivo de aspiración de virutas para aspirar virutas producidas por dicho cabezal de taladrado, escariado y avellanado.
50 27. Equipo de robots, de acuerdo con la reivindicación 26, en el que dicha primera unidad de trabajo llevada por el primer robot comprende un dispositivo para detectar una distancia entre el cabezal de taladrado, escariado y avellanado y la superficie de trabajo en el sitio de operación y un dispositivo para controlar un movimiento de avance del cabezal en función del resultado de dicha detección.
55 28. Equipo de robots, de acuerdo con la reivindicación 25, en el que dicha segunda unidad de trabajo llevada por el segundo robot comprende además un dispositivo de aplicación de material de sellado para aplicar un material de sellado a un taladro antes de la colocación de un remache en dicho taladro.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Sistema y método para realizar operaciones en artefactos con cápsulas robóticas replegables, del 24 de Junio de 2020, de ABB SCHWEIZ AG: Un método para operar al menos una cápsula robótica automatizada replegable en un espacio de trabajo donde se coloca una pieza de trabajo , la […]
Aparato de perforación y método, del 13 de Mayo de 2020, de BAE SYSTEMS PLC: Aparato de perforación para avellanar un orificio perforado previamente formado en una parte , estando el orificio perforado previamente […]
Método y disposición para generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa con varias estaciones, del 22 de Abril de 2020, de GUDEL GROUP AG: Método para la generar y probar trayectorias de transporte de piezas de trabajo candidatas en una prensa de estación múltiple, comprendiendo los […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
CONTROLADOR PARA ROBOTS, del 19 de Marzo de 2020, de ERLE ROBOTICS, S.L: En este documento se describe detalladamente y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras […]