CIP-2021 : G01S 13/86 : Combinaciones de sistemas de radar con sistemas no de radar,
p. ej. sonar, localizador de dirección.
CIP-2021 › G › G01 › G01S › G01S 13/00 › G01S 13/86[1] › Combinaciones de sistemas de radar con sistemas no de radar, p. ej. sonar, localizador de dirección.
Notas[n] desde G01S 13/00 hasta G01S 17/00: - Los grupos G01S 13/00 - G01S 17/00 cubren :
- los sistemas para detectar la presencia de un objeto, p. ej. por reflexión o por rerradiación desde el mismo objeto o desde un transpondedor asociado al objeto, para determinar la distancia o la velocidad relativa de un objeto, para proporcionar una representación coordenada de la distancia y de la dirección de un objeto o para obtener su imagen;
- los sistemas dispuestos para ser montados en una nave o vehículo móviles y que utilizan la reflexión de ondas en una superficie extensa externa a la nave, p. ej. sobre la superficie de la tierra, para determinar la velocidad y la dirección del movimiento de la nave con relación a la superficie.
- Los grupos G01S 13/00 - G01S 17/00 no cubren :
- los sistemas para determinar la dirección de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por los grupos G01S 1/00 o G01S 3/00;
- los sistemas para determinar la distancia o la velocidad de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por el grupo G01S 11/00 .
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
G01S 13/86 · Combinaciones de sistemas de radar con sistemas no de radar, p. ej. sonar, localizador de dirección.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento automático de asistencia al aterrizaje de una aeronave.
(22/04/2020) Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave entra en contacto con la pista de aterrizaje,
siendo dicho procedimiento realizado por un dispositivo de procesamiento de datos embarcado en dicha aeronave y configurado para ser conectado a:
- un altímetro configurado para medir la altitud de la aeronave,
- un medidor de desviación posicionado en el que una estación de tierra y configurado para medir una desviación de acimut de la aeronave con respecto a una dirección de referencia que conecta dicho punto de retorno (A) y la posición del medidor de desviación (E),
estando dicho procedimiento caracterizado…
Dispositivo de medición para medir la trayectoria de un objeto diana.
(08/01/2020) Sistema para medir la trayectoria de un objeto diana , comprendiendo el sistema:
un dispositivo de medición para medir la trayectoria de un objeto diana ; y
un dispositivo de radar separado del dispositivo de medición para emitir radiación de radar como primera radiación electromagnética de una primera longitud de onda,
donde el dispositivo de medición comprende:
un dispositivo receptor con un espejo primario y un espejo secundario ;
un primer detector para detectar la primera radiación electromagnética ;
un segundo detector para detectar la segunda radiación electromagnética de una segunda longitud de onda;
una unidad de radiación , que está diseñada para emitir radiación electromagnética con la segunda longitud de onda en la dirección de un eje óptico del dispositivo…
Mejoras aportadas y relativas a los datos de rumbos de navegación y/o de velocidad de un buque.
(15/10/2019). Solicitante/s: BAE SYSTEMS PLC. Inventor/es: NOYES,STEPHEN PAUL.
Un método para determinar una velocidad de un buque, en donde el buque es una embarcación , ubicada en una zona litoral, que comprende las etapas de:
detectar objetos en las proximidades de la embarcación, utilizando un sistema de radar utilizable para identificar y efectuar el seguimiento de los objetos;
seleccionar un objeto que tenga una velocidad relativa al buque que es inferior al umbral predefinido; y
determinar la velocidad del buque para que sea opuesta a la velocidad del objeto.
PDF original: ES-2727346_T3.pdf
Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado y vehículo motorizado.
(31/07/2019) Procedimiento para el autodiagnóstico de un sensor de entorno de un vehículo motorizado durante su operación, en donde los datos sensoriales registrados por el sensor de entorno se verifican contra al menos un criterio de verificación que indica un funcionamiento correcto usando al menos un valor de umbral, caracterizado porque mediante un dispositivo de control en función de al menos una información de posición que describe un entorno actual del vehículo motorizado , al menos un valor de umbral del criterio de verificación es adaptado dinámicamente durante la marcha y/o el autodiagnóstico se interrumpe temporalmente, en donde una indicación de localización es detectada mediante un sensor de localización de…
Terminal de operador con visualización de zonas de calidad de toma de imágenes.
(19/03/2019) Terminal de operador de un sistema de misión que consta al menos de una pantalla de visualización ( de datos medioambientales de un vehículo portador móvil P de un sistema de análisis de situación, constando dicho sistema de análisis de al menos un sensor de imágenes y de medios de suministro en 5 tiempo real de una posición espacial de al menos un objeto de interés (C), que consta de:
- un módulo de obtención de al menos una información de posición representativa de la posición del vehículo portador (P) y de al menos un susodicho objeto de interés (C),
- para al menos un modo de captura de imágenes de un sensor de imágenes seleccionado,…
Procedimiento para determinar una información de posición transversal de un vehículo a motor en una calzada y vehículo a motor.
(13/03/2019) Procedimiento para determinar una información de posición transversal de un vehículo a motor sobre una calzada , caracterizado por que los datos que describen al menos una parte de la calzada son registrados con al menos un sensor de radar del vehículo a motor , a través de la evaluación en los datos de radar se detectan y localizan características del entorno que describen la ubicación de un límite de la calzada, en base a las mismas se determinan un curso de los límites de la calzada, de la calzada , y distancias laterales del vehículo a motor con respecto a los límites de la calzada, y la información de posición transversal se determina como aquella, o en función de las distancias laterales del vehículo a motor con respecto a los límites de la calzada, en donde como, al menos, un sensor de…
Sistema de disuasión para sistemas aéreos no tripulados.
(06/02/2019) Un sistema para proporcionar detección integrada y contramedidas contra vehículos aéreos no tripulados que comprende:
(a) un receptor de RF de detección de dirección acoplado con una antena omnidireccional receptora y una antena direccional receptora para detectar una firma de RF de un vehículo aéreo no tripulado, un procesador de identificador de señal espectral para analizar la firma de RF para identificar un conjunto de firmas espectrales del vehículo aéreo no tripulado y un procesador de estimación de rango y dirección para determinar la ubicación del vehículo aéreo no tripulado a partir de los datos obtenidos por el receptor de RF de detección de dirección ;
(b) un sistema de radar provisto…
Sistema de gestión de aparcamiento.
(30/01/2019) Un método para monitorear un espacio de aparcamiento por un parquímetro , comprendiendo el método:
determinar y comunicar, mediante el parquímetro , la presencia de un vehículo en el espacio de aparcamiento a un servidor central , en el que el servidor central está acoplado comunicativamente al parquímetro ;
activar una unidad de establecimiento de sesión del parquímetro al determinar la presencia del vehículo;
establecer, mediante el parquímetro , una sesión con un dispositivo de usuario de un usuario del vehículo basándose en una solicitud de establecimiento de sesión recibida desde el dispositivo…
Procedimiento para detectar excesos de velocidad con almacenamiento restrictivo.
(06/09/2017) Procedimiento para la detección de excesos de velocidad con almacenamiento restrictivo de datos, en el que vehículos circulan a través de la zona de medición de una instalación de radar de usos múltiples y de un campo del objeto de una instalación de cámara con al menos una cámara, en el que la instalación de radar , que suministra datos de medición, y la instalación de cámara , que suministra datos del campo del objeto, están dispuestas y alineadas con respecto a una calzada y entre sí de tal manera que la zona de medición y el al menos un campo del objeto se solapan al menos parcialmente formando una zona de solape , se derivan datos de seguimiento del objeto basados en los datos de medición y al menos datos de seguimiento de la imagen basados en los datos del campo del objeto y que comprenden…
Sensor de radar integrado en la calzada.
(17/05/2017). Solicitante/s: VOLTRA solutions GmbH. Inventor/es: NIECHOJ,BERNHARD.
Dispositivo para el registro de informaciones de tráfico con al menos un dispositivo de sensor dispuesto de modo insertado en la calzada , en el que el dispositivo de sensor está orientado contra el suelo inferior de un vehículo y está conformado como sensor de radar que mide la velocidad y la distancia, en el que el sensor de radar detecta la velocidad del vehículo , caracterizado porque el sensor de radar , para el registro adicional del vehículo envía señales moduladas y lleva a cabo una medición de distancia entre el sensor de radar y el suelo inferior del vehículo.
PDF original: ES-2637621_T3.pdf
Procedimiento para detectar una rueda de un vehículo.
(05/04/2017) Procedimiento para detectar una rueda en rotación de un vehículo por evaluación del desplazamiento Doppler de un rayo de medida que es irradiado por una unidad detectora sobrepasada por el vehículo , reflejado por la rueda y recuperado en forma desplazada por efecto Doppler,
en el que el vehículo presenta en una posición relativa (R) con respecto a la rueda una unidad embarcada que puede establecer una radiocomunicación con un receptor de emisión de situación conocida (L) en la unidad detectora , cuyo procedimiento comprende:
medición de la dirección (δ) y la separación (z) de la unidad embarcada con respecto al emisor de recepción a partir de al menos una radiocomunicación entre éstos; y control de la dirección de irradiación (α, β,…
Dispositivo y procedimiento para identificar y documentar al menos un objeto que recorre un campo de radiación.
(29/03/2017) Dispositivo para identificar y documentar al menos un objeto que recorre un campo de medida , cuyo dispositivo incluye un sensor con un emisor para emitir una radiación de medida hacia un campo de radiación de sensor que cubre un campo de medida y con una unidad de receptor para recibir porciones de la radiación de medida reflejadas en al menos un objeto para formar datos de medida, una primera cámara y una segunda cámara están dispuestas con una distancia base entre ellas y que suministran respectivos datos de imagen, así como una unidad de ordenador para procesar los datos de medida y los datos de imagen, caracterizado
…
Sistema, dispositivo y procedimiento para proteger aeronaves de misiles entrantes y otras amenazas.
(15/03/2017) Un sistema para proteger una aeronave contra una o más amenazas inminentes, el sistema comprende:
uno o más sensores electro-ópticos para escanear un área alrededor de la aeronave una o más amenazas inminentes, y general una señal indicadora una vez que una amenaza inminente se haya detectado; un Sensor de Confirmación de Aproximación de Misiles integrado y una unidad de ContraMedida por InfraRrojos Dirigida configurada para verificar la amenaza inminente y para activar una contramedida contra la amenaza inminente; y
un procesador para recibir datos de uno o más de los sensores electro-ópticos mencionados y el Sensor de Confirmación…
Dispositivo y procedimiento para la detección de un eje de rueda de un vehículo.
(25/01/2017). Solicitante/s: KAPSCH TRAFFICCOM AG. Inventor/es: NAGY, OLIVER.
Dispositivos para la detección de un eje de rueda de un vehículo en marcha sobre una calzada , comprendiendo:
una pluralidad de sensores de radar (Rn), los cuales tienen radar-transceptores (Tn) dispuestos repartidos en una estructura de soporte transversal por encima de la calzada y por medio de un rayo de medición (Bn) orientado aproximadamente hacia abajo de su radar-transceptor (Tn) en momentos sucesivos generan, respectivamente, un valor de medición de la velocidad de Doppler (vn) para un objeto que reflecta el rayo de medición de radar (Bn), y
una unidad de evaluación (A) conectada a salidas de valores de medición de los sensores de radar (Rn), la cual está configurada para detectar un eje de rueda si dos sensores de radar (Rn, Rn-x) generan, dentro de una ventana temporal de tolerancia (W), máximos (vn,p, vn-x,p) esencialmente de igual magnitud, o en lugar de esto mínimos esencialmente de igual magnitud, que sus valores de la medición de velocidad (vn, vn-x).
PDF original: ES-2622928_T3.pdf
Procedimiento para enfocar un haz de alta energía en un punto de referencia en la superficie de un objeto volador en vuelo.
(30/11/2016) Procedimiento para enfocar un haz de una fuente de radiación de alta energía , particularmente un haz láser, en un punto de referencia (HP) en la superficie de un objeto volador en vuelo , que incluye las etapas siguientes:
a) Grabación de un número de imágenes bidimensionales consecutivas del objeto volador en vuelo con un procedimiento de imagen que utiliza un dispositivo de adquisición de imágenes ;
b) Determinación de la trayectoria (T) de la ruta de vuelo del objeto volador como una secuencia de puntos de recorrido tridimensionales;
c) Determinación simultáneamente de la línea del ángulo de visión entre el dispositivo de adquisición de…
Procedimiento para el funcionamiento de un sensor de radar en un automóvil, sensor de radar y automóvil.
(09/11/2016). Solicitante/s: AUDI AG. Inventor/es: KHLIFI,RACHID.
Procedimiento para el funcionamiento de un sensor de radar utilizado para la percepción del entorno para un automóvil , en el que para al menos un trayecto recorrido por el automóvil se calculan datos de referencia que describen características estáticas perceptibles a través del sensor de radar , teniendo en cuenta datos de radar registrados a lo largo del trayecto y se registran dentro del sensor de radar , caracterizado por que en el caso de un recorrido nuevo de al menos una sección de un trayecto, para el que se han registrado datos de referencia, se realiza con gasto reducido la evaluación de datos de radar registrado actualmente teniendo en cuenta los datos de referencia.
PDF original: ES-2651339_T3.pdf
Procedimiento y dispositivo de procesamiento de datos.
(10/08/2016) Procedimiento para aumentar la precisión de asociación de datos, que comprende las etapas de
• generar una primera entidad de datos de cinemática (KIN1) y una primera entidad de datos de identidad (ID1) referidas al menos a un objeto; y
• generar una segunda entidad de datos de cinemática (KIN2) y una segunda entidad de datos de identidad (ID2) referidas al menos a un objeto,
• generar al menos una matriz de distancias utilizando las entidades de datos de cinemática (KIN1, KIN2) o las entidades de datos de identidad (ID1, ID2); y
• filtrar la citada al menos una matriz de distancias generada;
caracterizado por
• generar la primera…
Dispositivo y procedimiento para el posicionamiento tridimensional.
(03/08/2016) Dispositivo para el posicionamiento tridimensional que presenta una estación base de radar secundario , que está prevista para la medición de la distancia a transpondedores y presenta al menos una antena de radar , un receptor GNSS que está previsto para la medición de señales GNSS y presenta una antena de recepción GNSS , una unidad de medición inercial que está prevista para determinar con respecto a un punto de referencia la posición de la antena de recepción GNSS, así como la de la al menos una antena de radar en un sistema de coordenadas común, y un procesador de integración , al que son proporcionadas las mediciones de pseudodistancia del receptor GNSS, las mediciones de distancia del radar y movimientos del dispositivo alrededor de los ejes del sistema de coordenadas común…
Sistema, dispositivo y método para proteger aeronaves contra amenazas en aproximación.
(06/04/2016) Un sistema para proteger una aeronave contra amenazas en aproximación, comprendiendo el sistema :
(a) un módulo de seguimiento y confirmación de radiofrecuencia (RF) de dos bandas, que comprende:
un receptor de RF de doble banda para recibir señales de RF de banda alta y las señales de RF de banda baja;
un módulo de confirmación de amenaza para confirmar una posible amenaza en aproximación en función del procesamiento de señales de RF recibidas por el receptor de RF de doble banda ;
una calculadora de parámetros de amenaza para calcular una posición angular fina y una posición angular precisa de una amenaza…
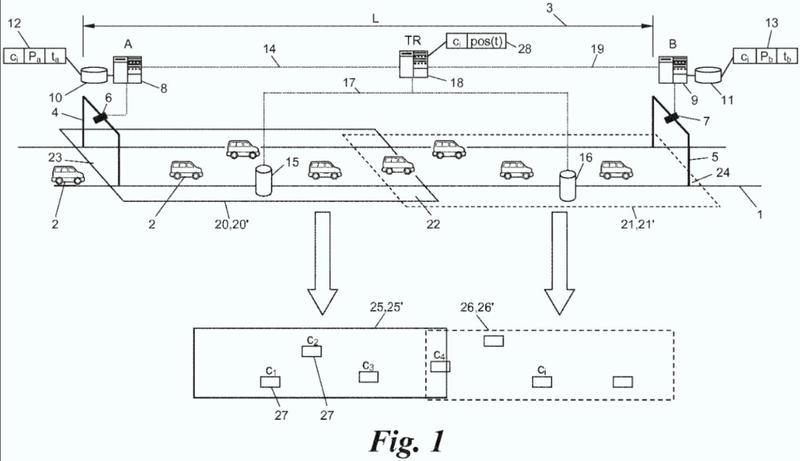
Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad.
(16/02/2016). Ver ilustración. Solicitante/s: KAPSCH TRAFFICCOM AG. Inventor/es: Abl,Alexander.
Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que comprende:
registrar el tiempo de entrada (ta) de un vehículo en la entrada , generar una identificación de objeto (ci) para el vehículo inequívoca e independiente de la identidad real del vehículo y almacenar el tiempo de entrada (ta) bajo la identificación de objeto (ci),
seguir el movimiento del vehículo que se referencia a este respecto de manera continua mediante la identificación de objeto (ci) y durante todo el tramo con ayuda de una disposición de sensores (TR), registrar el tiempo de salida (tb) del vehículo referenciado mediante la identificación de objeto (ci) en la salida , y
si una comparación del tiempo de salida (tb) registrado con el tiempo de entrada (ta) almacenado indica una velocidad que supera un valor umbral (s): registrar una imagen de salida (Pb) del vehículo en la salida.
PDF original: ES-2559827_T3.pdf
Procedimiento para advertir al conductor de un vehículo motorizado de la generación de una situación de peligro como consecuencia de una deriva no intencional a un carril de tránsito en sentido contrario.
(13/05/2015) Procedimiento para advertir al conductor de un vehículo motorizado de la generación de una situación de peligro como consecuencia de una deriva no intencional en sentido de o a un carril de tránsito en sentido contrario, caracterizado por que
- se determina un corredor virtual de circulación dirigido en el sentido de marcha del vehículo motorizado propio,
- usando en particular un sistema de captación, particularmente óptica, se determina una señalización horizontal de calzada que separa el carril propio del carril de tránsito en sentido contrario,
- se determina la posición relativa del vehículo propio respecto de la señalización horizontal de calzada,
- usando…
Sistema de radar de formas de onda pseudo-ortogonal, radar de formas de onda cuadráticas polifásicas y métodos para localizar los objetivos.
(29/04/2015) Un sistema de radar que incluye:
un generador de código configurado para generar un grupo de códigos pseudo-ortogonales , en donde un producto escalar de dos de los códigos de pseudo-ortogonales es prácticamente cero;
elementos transmisores cada uno configurado para transmitir simultáneamente uno de un grupo de formas de onda pseudo-ortogonal en un elemento asociado de un grupo de elementos de antena , donde se generan las formas de onda pseudo-ortogonales de un elemento correspondiente de los códigos pseudo-ortogonales ;
circuitos configurados para combinar y digitalizar las señales de retorno recibidas por los elementos de la antena y generar una sola forma de onda digital ;
y un procesador de forma de onda configurado para realizar correlaciones en la forma de onda digital única combinada …
Procedimiento y disposición para la fusión de datos.
(04/03/2015) Procedimiento para fusionar datos procedentes de diferentes sensores de diferentes plataformas dentro de una única plataforma, que comprende las etapas de:
- la generación (s610) en una primera plataforma de una primera entidad de información, que comprende las etapas de:
- la asociación de un primer conjunto de datos generado por un primer sensor de dicha primera plataforma con un segundo conjunto de datos generado por un segundo sensor de dicha plataforma;
- la realización de un proceso de fusión de los conjuntos de datos asociados, y
- la generación de la primera entidad de información dependiendo del proceso de fusión realizado;
- la recepción de una segunda entidad de información relacionada con una segunda plataforma de cooperación;
-…
Procedimiento y sistema para la detección de objetivos.
(04/03/2015) Procedimiento para la detección de objetivos (z) por medio de al menos una primera instalación de sensor (SE) que contiene al menos un primer sensor (S1) y de una segunda instalación de sensor, que contiene al menos un segundo sensor (BS), en el que el segundo sensor (BS) puede ser alineado por medio de una instalación de control en diferentes direcciones espaciales, con las siguientes etapas del procedimiento:
a) por medio de la primera instalación de sensor (SE) se detectan objetivos (ZOn),
b) para los objetivos (ZOn) se determina, respectivamente, una información sobre la dirección espacial (Ri) con relación a la posición del segundo sensor (BS) y al menos un primer parámetro del objetivo (PAn),
c) al menos una parte de los objetivos (ZOn) es registrada con el al menos un primer parámetro del objetivo…
Procedimiento de gestión de un sistema de ayuda a la conducción acoplado a un sistema de ayuda al frenado de un vehículo automóvil enfrentado a un riesgo de colisión.
(05/11/2014) Procedimiento de gestión de un sistema de ayuda a la conducción y de un sistema de ayuda al frenado de un vehículo automóvil, comprendiendo el citado sistema de ayuda a la conducción un sistema de regulación de velocidad (RVVi) apto para regular la velocidad de un vehículo automóvil, y comprendiendo el citado sistema de ayuda al frenado un sistema de frenado automático (FARC) que es activado en caso de riesgo de colisión del vehículo con un obstáculo presente en la trayectoria, consistiendo el citado procedimiento:
i) en impedir la activación del sistema de regulación (RVVi) o en desactivarle cuando el vehículo satisface más o menos un criterio dinámico determinado del…
Procedimiento para la detección de una rueda de un vehículo.
(29/10/2014) Procedimiento para la detección de una rueda de un vehículo mediante emisión por una unidad de detector de un rayo de medición electromagnético de desarrollo de frecuencia conocido y registro de las frecuencias del rayo de medición reflejado a la unidad de detector en el transcurso temporal con respecto al desarrollo de frecuencia conocido como señal de recepción (E), presentando el vehículo una unidad de a bordo que puede establecer una comunicación por radio con un transceptor de la unidad de detector y guarda una información (D) que indica la longitud del vehículo (L) al menos indirectamente, que comprende:
lectura de la mencionada información (D) de la unidad de a bordo mediante una comunicación por radio y medición de la velocidad (v) del vehículo…
Procedimiento para la detección de una rueda de un vehículo.
(29/10/2014) Procedimiento para la detección de una rueda que gira de un vehículo mediante evaluación del desplazamiento de Doppler de un rayo de medición , que es irradiado por una unidad de detector por la que ha pasado el vehículo , reflejado por la rueda y recuperado por desplazamiento de Doppler,
presentando el vehículo en una posición relativa (R) a la rueda una unidad de a bordo que puede establecer una comunicación por radio con un transceptor de ubicación (L) conocida en la unidad de detector , que comprende:
medición de sentido (d) y distancia (z) de la unidad de a bordo al transceptor a partir de al menos una comunicación por radio entre los mismos; y
control del sentido de irradiación (a, b, g) o de la posición de irradiación…
Dispositivo detector formado por una combinación entre georradar y detector de metales.
(20/08/2014) Dispositivo detector con al menos un georradar y al menos un detector de metales para la detección de cuerpos situados en el suelo de tipo metálico y no metálico, en especial para la detección de minas terrestres y/o trampas explosivas, en donde el detector de metales comprende al menos una bobina , y se forma una placa mediante las espiras de la bobina , en donde ésta representa por segmentos una placa conductora , caracterizado porque el detector de metales está dispuesto perpendicularmente en la estructura de georradar del georradar , de tal modo que la normal superficial (n) del detector de metales señala en la dirección de la polarización de la intensidad de campo eléctrica (E) del impulso radar emitido o recibido del georradar , y las ondas eléctricas se propagan sin perturbaciones a…
Unidad de campo de radar para sistema que evita la colisión entre una aeronave y un obstáculo.
(04/06/2014) Una unidad de campo para detectar y avisar a una aeronave acerca de un obstáculo, comprendiendo la unidad de campo una unidad central de procesamiento y un sistema de radar para la detección con radar de una aeronave en un área de cobertura de radar:
- comprendiendo el sistema de radar:
- una antena de radar que comprende una pluralidad de paneles de antena , comprendiendo cada uno una pluralidad de elementos de antena radiantes , estando dispuestos los paneles de antena como los lados de un octógono; y
- componentes electrónicos de radar en comunicación con la antena de radar, comprendiendo los componentes electrónicos…
SISTEMA DE SENSORES MÚLTIPLES.
(09/01/2012) Un sistema de aviónica que comprende un sistema de radar , , y un sistema de producción de imagen óptica , , , un monitor de radar y un monitor de imagen óptica , siendo capaz dicho sistema de radar de efectuar el seguimiento de forma automática de un objetivo de radar, caracterizado porque dicho sistema de aviónica está provisto de una unidad de ayuda a la decisión que incorpora una conexión con dicho sistema de radar y con dicho sistema de producción de imagen óptica , , , estando dicha unidad de ayuda a la decisión conectada a una unidad de entrada / salida para introducir uno o más parámetros de decisión, y en el que, durante una misión de vuelo, dicha unidad de ayuda a la decisión está diseñada para recibir uno o más parámetros de seguimiento de radar automáticos desde el sistema de radar , utilizar dichos parámetros de decisión…
APARATO DE PROCESAMIENTO Y VISUALIZACION DE RADAR.
(28/01/2010) Aparato de procesamiento y visualización de radar adaptado para emitir una señal de radar a lo largo de un alcance y detectar una señal de retorno dentro de dicho alcance, predecir y visualizar las posiciones de una primera pluralidad de objetivos actualmente fuera de dicho alcance y previamente detectados por dicha señal de retorno, caracterizado porque las posiciones de dicha primera pluralidad de objetivos son predichas desde al menos una señal de retorno de radar previamente detectadas a partir de la primera pluralidad de objetivos dentro de dicho alcance y comprendiendo, además, el aparato un receptor adaptado para detectar una o más transmisiones de identificación de objetivos, los cuales…
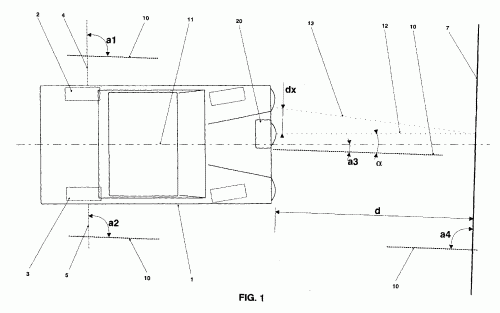
DISPOSITIVO DE REGLAJE DE LA ALINEACION DE UN RADAR PARA AUTOMOVILES.
(16/07/2004). Ver ilustración. Solicitante/s: THOMSON-CSF. Inventor/es: ARTIS, JEAN-PAUL.
LA INVENCION SE REFIERE A UN DISPOSITIVO DE AJUSTE DE LA ALINEACION DE UN RADAR PARA AUTOMOVILES, MAS CONCRETAMENTE PARA LA ALINEACION DEL EJE RADIOELECTRICO DEL RADAR RESPECTO A UNA DIRECCION RELATIVA AL VEHICULO. EL DISPOSITIVO LLEVA MEDIOS DE MEDICION DE LA POSICION DEL VEHICULO RESPECTO A UNA DIRECCION DE REFERENCIA , UN ESPEJO Y MEDIOS DE MEDICION DEL DESVIO ANGULAR (DX) ENTRE UN RAYO EMITIDO Y SU RAYO REFLEJADO POR EL ESPEJO , DEPENDIENDO EL DESVIO ANGULAR (DX) DEL ANGULO AL ENTRE EL RAYO EMITIDO Y LA DIRECCION DE REFERENCIA . SIENDO EL RAYO EMITIDO O EL ESPEJO PARALELOS AL EJE RADIOELECTRICO DEL VEHICULO . LA INVENCION SE APLICA CONCRETAMENTE A LA ALINEACION DEL EJE RADIOELECTRICO DE UN RADAR SOBRE EL EJE DE EMPUJE DE UN VEHICULO.
{kind=link}
{kind=link}