Procedimiento de gestión de un sistema de ayuda a la conducción acoplado a un sistema de ayuda al frenado de un vehículo automóvil enfrentado a un riesgo de colisión.
Procedimiento de gestión de un sistema de ayuda a la conducción y de un sistema de ayuda al frenado de un vehículo automóvil,
comprendiendo el citado sistema de ayuda a la conducción un sistema de regulación de velocidad (RVVi) apto para regular la velocidad de un vehículo automóvil, y comprendiendo el citado sistema de ayuda al frenado un sistema de frenado automático (FARC) que es activado en caso de riesgo de colisión del vehículo con un obstáculo presente en la trayectoria, consistiendo el citado procedimiento:
i) en impedir la activación del sistema de regulación (RVVi) o en desactivarle cuando el vehículo satisface más o menos un criterio dinámico determinado del vehículo en presencia del obstáculo,
caracterizado por que consiste
ii) en generar una primera alerta (ARC 1) en un primer tiempo restante (T5) antes de la colisión para informar al conductor de un riesgo potencial de colisión;
iii) en generar una segunda alerta (ARC 2) en un segundo tiempo restante (T4) antes de la colisión, inferior al primer tiempo restante (T5), recomendando firmemente la intervención del conductor para evitar la colisión; y
iv) en activar el sistema de frenado automático (FARC) con una intensidad (I1, I2) que es función del tiempo restante antes de la colisión con el obstáculo, en ausencia de intervención del conductor sobre la dinámica del vehículo después de la generación de la primera alerta (ARC) y en ausencia de reacción o de reacción insuficiente del conductor para evitar una colisión.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2011/052048.
Solicitante: PEUGEOT CITROEN AUTOMOBILES SA.
Nacionalidad solicitante: Francia.
Dirección: ROUTE DE GISY 78140 VELIZY VILLACOUBLAY FRANCIA.
Inventor/es: GERONIMI,STÉPHANE, FRADIN,LOÏC, GURRET,FABIEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K31/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › Accesorios actuantes únicamente sobre una sola subunidad, para el control automático de la velocidad, p.ej. prevenir que la velocidad sobrepase un valor determinado o mantener una velocidad particular, seleccionada por el conductor del vehículo (accesorios actuantes sobre dos o más subunidades B60W 30/14; control del conjunto de propulsión en sí ver las clases o subclases apropiadas, p. ej. F02D; indicadores de velocidad G01P; sistemas o dispositivos para controlar la velocidad en general G05D 13/00).
- B60T7/22 B60 […] › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › B60T 7/00 Organos de iniciación de la acción de los frenos. › desencadenados por el contacto del vehículo, p. ej. del parachoques, con un obstáculo exterior, p. ej. otro vehículo.
- B60W30/08 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Anticipación o prevención de colisiones probables o inminentes.
- B60W30/16 B60W 30/00 […] › Control de la distancia entre vehículos, p. ej. para mantener una distancia con el vehículo que le precede.
- G01S13/86 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › Combinaciones de sistemas de radar con sistemas no de radar, p. ej. sonar, localizador de dirección.
PDF original: ES-2525359_T3.pdf
Fragmento de la descripción:
Procedimiento de gestión de un sistema de ayuda a la conducción acoplado a un sistema de ayuda al frenado de un vehículo automóvil enfrentado a un riesgo de colisión
La invención concierne a los vehículos equipados con un sistema de ayuda a la conducción, tal como un regulador de velocidad y con un sistema de ayuda al frenado que comprende un sistema de alerta de riesgo de colisión y un sistema de frenado automático en caso de riesgo de colisión.
Ésta se refiere de modo más particular a un procedimiento de gestión de un sistema de ayuda a la conducción acoplado a un sistema de ayuda al frenado de un vehículo automóvil.
Actualmente, aparecen cada vez más funciones para, por una parte, aportar un confort al conductor, en particular ayudándole en la función de conducción y, por otra, ayudándole en las situaciones críticas especialmente durante un riesgo de colisión.
En los vehículos actuales, estas funciones son independientes una de otra y por tanto sin interacción entre ellas.
Ciertos vehículos automóviles están equipados con un regulador de velocidad que permite mantenerles a una velocidad de consigna definida por el conductor. En presencia de una limitación de velocidad impuesta por la legislación de un país, los conductores eligen frecuentemente la velocidad máxima legal como velocidad de consigna.
En teoría, esto es ventajoso para favorecer la fluidez del tráfico, especialmente en autopista. Pero, en la práctica, se percibe que los vehículos no disponen ni de calibración de velocidad idéntica, ni de precisión de velocidad idéntica, por lo que a pesar de una misma velocidad de consigna, estos tienen tendencia a aproximarse o a alejarse progresivamente uno a otro.
Cuando dos vehículos se aproximan por la razón citada anteriormente o debido a que estos no tienen las mismas velocidades de consigna, el conductor del vehículo seguidor, si quiere respetar una distancia entre vehículos conveniente, debe reducir manualmente la velocidad de consigna, o bien desviarse (lo que obliga a acelerar a fin de adelantar rápidamente al vehículo que le precede y por tanto rebasar la velocidad máxima autorizada), o también frenar (lo que desactiva el regulador de velocidad). Además, es difícil para el conductor del vehículo seguidor determinar cuándo la distancia entre vehículos no es suficiente para garantizar la seguridad. En efecto, la distancia mínima entre vehículos depende principalmente de la velocidad de los vehículos, del estado de superficie de la carretera y de las capacidades de frenado de los vehículos. En razón de esta dificultad, ciertos países han impuesto, o están a punto de imponer, un tiempo entre vehículos (o TIV) mínimo correspondiente a la velocidad máxima autorizada.
Siendo este TIV igualmente difícil de estimar y por tanto de respetar, se ha propuesto, especialmente en el documento FR 2 888 536, limitar el tiempo entre vehículos y la velocidad del vehículo seguidor, a fin de impedir al conductor de este último seguir demasiado cerca al vehículo que le precede. Para hacer esto, se estima el tiempo entre vehículos por el cálculo, a partir de la distancia entre vehículos y de la velocidad del vehículo seguidor, después se compara este tiempo entre vehículos estimado con un valor de tiempo entre vehículos de referencia, y se compara la velocidad instantánea del vehículo seguidor con un valor de velocidad de referencia. Finalmente, se limita el par del motor del vehículo seguidor cuando el tiempo entre vehículos estimado alcanza el valor del tiempo entre vehículos de referencia y/o cuando la velocidad del vehículo seguidor alcanza la velocidad de referencia.
En particular, la función de confort « Regulador de Velocidad Inteligente » (RVVi) descrita en el documento FR 2 92 384, aporta una mejora de la regulación ralentizando el vehículo durante la aproximación a un vehículo más lento
que le precede.
Esta función aporta también mejoras a nivel de seguridad:
- impidiendo activar el regulador cuando el vehículo precedente al vehículo portador (se sobreentiende que el vehículo seguidor está equipado con el regulador) está demasiado cerca o es demasiado lento, o
- desactivando automáticamente el regulador del vehículo portador si este último se aproxima demasiado o demasiado deprisa al vehículo que le precede.
Por otra parte, en el ámbito de la seguridad, dos funciones distintas permiten:
- por una parte, alertar al conductor en caso de riesgo de colisión con el vehículo que le precede (función ARC: « Alerta de Riesgo de colisión »),
- por otra, ayudar al conductor desacelerando el vehículo para darle más tiempo para actuar en caso de colisión inminente y disminuir la velocidad en el choque (función FARC: « Frenar Automáticamente el vehículo en caso de Riesgo de colisión »).
Los principales inconvenientes de tener varias funciones independientes una de otra, son que cada una de éstas propone su propia interfaz hombre-máquina IHM: medios de generación de alertas, medios de regulaciones de consignas,..., y sus propios modos de utilización que pueden parecer complejos para el conductor, incluso incomprensibles.
Además, en ciertas situaciones de la vida de servicio, las informaciones y/o alertas activadas por las funciones pueden ser incoherentes o redundantes.
Estos inconvenientes son percibidos entonces por el conductor del vehículo equipado con estas funciones, como puntos negativos mientras que estas funciones, destinadas a asegurar al conductor, solamente deberían ser percibidas positivamente.
Por el documento US22/11373, se conoce un procedimiento de acuerdo con el preámbulo de la reivindicación 1. Por el documento FR2 862 414, se conoce igualmente un procedimiento de asistencia al frenado apto para controlar y adaptar la intensidad del frenado en función de la inminencia de la colisión con un obstáculo.
La presente invención está destinada a mejorar la interacción del sistema con el conductor.
A tal efecto, la presente invención tiene como primer objeto, un procedimiento de gestión de un sistema de ayuda a la conducción y de un sistema de ayuda al frenado de un vehículo automóvil de acuerdo con la parte caracterizante de la reivindicación 1.
De acuerdo con una característica, el procedimiento anterior consiste en impedir la activación o en desactivar el sistema de regulación cuando el vehículo está a una distancia inferior a una distancia de consigna o un tiempo inferior a un tiempo entre vehículos determinado del obstáculo, y consiste en activar el sistema de frenado automático con una intensidad que es función del tiempo restante antes de la colisión con el obstáculo.
De acuerdo con otra característica, éste consiste en generar una tercera alerta en un tercer tiempo restante antes de la colisión, inferior al segundo tiempo restante que impone una intervención inmediata del conductor para evitar la colisión.
De acuerdo con otra característica, éste consiste en activar el sistema de frenado automático con una primera intensidad determinada, en un cuarto tiempo restante antes de la colisión, inferior al tercer tiempo restante antes de la colisión; tiempo restante en el cual un evltamlento de la colisión por giro de las ruedas o frenado es difícil para una gran mayoría de los conductores.
De acuerdo con otra característica, la alerta es de tipo visual y/o sonoro y/u táctil.
De acuerdo con otra característica, la intensidad de la alerta es proporcional a la Inminencia de la colisión.
De acuerdo con otra característica, éste consiste en activar el sistema de frenado automático con una intensidad máxima en función de la intensidad máxima de desaceleración del vehículo, cuando el evltamlento de la colisión por giro de las ruedas es casi irrealizable.
La Invención tiene como segundo objeto un sistema de ayuda a la conducción acoplado a un sistema de ayuda al frenado de un vehículo para la puesta en práctica del procedimiento tal como el descrito anteriormente.
Las diferentes funciones así unificadas, ganan en coherencia y debido a esto, aportan una mejor ergonomía para el cliente.
Por otra parte, el procedimiento de acuerdo con la Invención aporta una facilidad de puesta a punto unificando los algoritmos y los criterios utilizados para definir los diferentes umbrales de activación y de cadencia de la activación/desactivación de las diferentes fases puestas en práctica por las funciones de confort RVVi y de seguridad ARC, FARC.
Otras características y ventajas de la invención se pondrán de manifiesto con el examen de la descripción detallada que sigue, acompañada de las figuras anejas, que ilustran:
... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de gestión de un sistema de ayuda a la conducción y de un sistema de ayuda al frenado de un vehículo automóvil, comprendiendo el citado sistema de ayuda a la conducción un sistema de regulación de velocidad (RVVi) apto para regular la velocidad de un vehículo automóvil, y comprendiendo el citado sistema de ayuda al frenado un sistema de frenado automático (FARC) que es activado en caso de riesgo de colisión del vehículo con un obstáculo presente en la trayectoria, consistiendo el citado procedimiento:
i) en impedir la activación del sistema de regulación (RVVI) o en desactivarle cuando el vehículo satisface más o menos un criterio dinámico determinado del vehículo en presencia del obstáculo,
caracterizado por que consiste
ii) en generar una primera alerta (ARC 1) en un primer tiempo restante (T5) antes de la colisión para informar al conductor de un riesgo potencial de colisión;
iii) en generar una segunda alerta (ARC 2) en un segundo tiempo restante (T4) antes de la colisión, Inferior al primer tiempo restante (T5), recomendando firmemente la Intervención del conductor para evitar la colisión; y
iv) en activar el sistema de frenado automático (FARC) con una intensidad (11, 12) que es función del tiempo restante antes de la colisión con el obstáculo, en ausencia de Intervención del conductor sobre la dinámica del vehículo después de la generación de la primera alerta (ARC) y en ausencia de reacción o de reacción Insuficiente del conductor para evitar una colisión.
2. Procedimiento de acuerdo con la reivindicación precedente, caracterizado por que consiste en generar una tercera alerta en un tercer tiempo restante (T3) antes de la colisión, inferior al segundo tiempo restante (T4) que impone una intervención inmediata del conductor para evitar la colisión.
3. Procedimiento de acuerdo con la reivindicación precedente, caracterizado por que consiste en activar el sistema de frenado automático (FARC) con una primera Intensidad (11) determinada, en un cuarto tiempo restante (T2) antes de la colisión, Inferior al tercer tiempo restante (T3) antes de la colisión; tiempo restante para el cual un evitamiento de la colisión por giro de las ruedas o frenado es difícil para una gran mayoría de los conductores.
4. Procedimiento de acuerdo con una de las reivindicaciones 1 a 3, caracterizado por que la alerta es de tipo visual y/o sonoro y/o táctil.
5. Procedimiento de acuerdo con la reivindicación precedente, caracterizado por que la intensidad de la alerta es proporcional a la Inminencia de la colisión.
6. Procedimiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que consiste en activar el sistema de frenado automático (FARC) con una intensidad (I2) máxima en función de la intensidad máxima de desaceleración del vehículo, cuando el evitamiento de la colisión por giro de las ruedas es casi irrealizable
7. Procedimiento de acuerdo con una de las reivindicaciones precedentes, caracterizado por que consiste en impedir la activación o en desactivar el sistema de regulación cuando el vehículo está a una distancia inferior a una distancia de consigna o un tiempo inferior a un tiempo entre vehículos determinado del obstáculo.
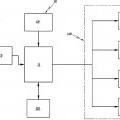
8. Sistema de ayuda a la conducción acoplado a un sistema de ayuda al frenado de un vehículo, que pone en práctica el procedimiento de acuerdo con una de las reivindicaciones 1 a 7, comprendiendo el citado sistema de ayuda a la conducción un regulador de velocidad (RVVi) apto para regular la velocidad de un vehículo automóvil y comprendiendo el citado sistema de ayuda al frenado un sistema de alerta (ARC) y un sistema de frenado automático (FARC); comprendiendo el sistema de ayuda a la conducción y el sistema de ayuda al frenado automático una interfaz IHM (1) común que es la del regulador de velocidades (RVVi).
Patentes similares o relacionadas:
SISTEMA DE MEJORA DE MODO DE CONDUCCIÓN CRUCERO CON INCLUSIÓN DE RUTAS CON TRAYECTOS CURVOS BASADO EN AJUSTES DE VELOCIDAD AUTOMÁTICOS, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración en vehiculos y un método de operación de los mismos que permite cambios de comportamiento en éste para posibilitar […]
Vehículo que comprende un conjunto de rueda, del 23 de Octubre de 2018, de Nissan Motor Manufacturing (UK) Ltd: Vehículo que incluye un sistema de control del vehículo; un controlador ; y al menos un conjunto de rueda; dicho conjunto de rueda incluye […]
Procedimiento y sistema para controlar una distancia de conducción, del 22 de Junio de 2016, de VOLVO LASTVAGNAR AB: Un procedimiento para controlar una distancia de conducción entre un vehículo anfitrión (H) y un primer vehículo (A) que conduce por delante de dicho […]
Método, control y sistema para controlar un pedal de realimentación de fuerza de acelerador (AFFP) como sistema de asistencia para control de distancia o velocidad en el tráfico por carretera, del 11 de Mayo de 2016, de CONTI TEMIC MICROELECTRONIC GMBH: Procedimiento para la regulación de la fuerza de recuperación de una unidad de control de automóviles, en el que en la unidad de control se trata de un pedal de acelerador o de […]
 Dispositivo para la generación de una alarma en respuesta a la velocidad de un vehículo, del 24 de Noviembre de 2015, de CF3000 - S.R.L: Aparato para la generación de una señal de alarma para el conductor de un vehículo en relación con una velocidad real del vehículo, que comprende
a. un […]
Dispositivo para la generación de una alarma en respuesta a la velocidad de un vehículo, del 24 de Noviembre de 2015, de CF3000 - S.R.L: Aparato para la generación de una señal de alarma para el conductor de un vehículo en relación con una velocidad real del vehículo, que comprende
a. un […]
 Procedimiento y sistema para controlar un control de crucero de un vehículo, del 17 de Diciembre de 2014, de VOLVO LASTVAGNAR AB: Procedimiento para controlar un control de crucero de un vehículo que comprende las etapas de:
• conducir dicho vehículo con dicho control de crucero […]
Procedimiento y sistema para controlar un control de crucero de un vehículo, del 17 de Diciembre de 2014, de VOLVO LASTVAGNAR AB: Procedimiento para controlar un control de crucero de un vehículo que comprende las etapas de:
• conducir dicho vehículo con dicho control de crucero […]
 Dispositivo de control de crucero para una motocicleta, del 30 de Julio de 2014, de SUZUKI MOTOR CORPORATION: Un dispositivo de control de crucero para una motocicleta incluyendo un sistema de control electrónico de válvula de mariposa, incluyendo el dispositivo […]
Dispositivo de control de crucero para una motocicleta, del 30 de Julio de 2014, de SUZUKI MOTOR CORPORATION: Un dispositivo de control de crucero para una motocicleta incluyendo un sistema de control electrónico de válvula de mariposa, incluyendo el dispositivo […]
MÉTODO Y DISPOSITIVO PARA ALERTAR DE LA PROXIMIDAD DE UNA ZONA DE PEAJE, del 7 de Diciembre de 2011, de RENAULT S.A.S.: Procedimiento para alertar al conductor de un vehículo (V) equipado con un sistema de navegación a bordo , con un regulador de velocidad (RV), de la proximidad de una zona […]