Procedimiento para la detección de una rueda de un vehículo.
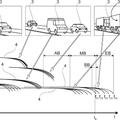
Procedimiento para la detección de una rueda que gira (1) de un vehículo (2) mediante evaluación del desplazamiento de Doppler de un rayo de medición (6),
que es irradiado por una unidad de detector (5) por la que ha pasado el vehículo (2), reflejado por la rueda (1) y recuperado por desplazamiento de Doppler,
presentando el vehículo (2) en una posición relativa (R) a la rueda (1) una unidad de a bordo (15) que puede establecer una comunicación por radio (23) con un transceptor (24) de ubicación (L) conocida en la unidad de detector (5), que comprende:
medición de sentido (d) y distancia (z) de la unidad de a bordo (15) al transceptor (24) a partir de al menos una comunicación por radio (23) entre los mismos; y
control del sentido de irradiación (a, b, g) o de la posición de irradiación (A) del rayo de medición (6) en función del sentido (d) y de la distancia (z) medidos y considerando la posición relativa (R) y la ubicación (L) mencionadas,
midiéndose la mencionada posición relativa (R) por parte de un equipo de control (17) estacionario o móvil y guardándose mediante una comunicación por radio (23') en la unidad de a bordo (15), y leyéndose para la mencionada consideración la posición relativa (R) guardada en la unidad de a bordo (15) mediante una comunicación por radio (23).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12175290.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: NAGY, OLIVER.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S13/86 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › Combinaciones de sistemas de radar con sistemas no de radar, p. ej. sonar, localizador de dirección.
- G01S13/91 G01S 13/00 […] › para el control de tráfico (G01S 13/93 tiene prioridad).
- G01S7/41 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › que utilizan el análisis de la señal de eco para la caracterización del blanco; Firma del blanco; Sección transversal del blanco.
PDF original: ES-2527573_T3.pdf
Fragmento de la descripción:
Proced imiento para la detección de una rueda de un vehículo La presente invención se refiere a un procedimiento para la detección de una rueda que gira de un vehiculo mediante evaluación del desplazamiento de Doppler de un rayo de medición, que es irradiado por una unidad de detector por la que ha pasado el vehículo, reflejado por la rueda y recuperado por desplazamiento de Doppler.
La detección de ruedas de vehiculos es de interés en numerosas aplicaciones. Asi puede reconocerse con seguridad la circulación por una determinada superficie de tráfico a partir del reconocimiento de ruedas, por ejemplo para la vigilancia de fronteras o para la activación de determinadas acciones, tales como la activación de una alarma, la conexión de una luz, la apertura de un armario, la toma de una foto con fines de vigilancia, etc. A menudo, los sistemas de tasas de transporte modemos también se ajustan al número de ejes de vehiculos para el cálculo de tasas, de modo que la detección de ruedas (ejes de rueda) también puede ser una base importante para la recaudación o el control de tasas de peajes, en particular también mediante vehículos de control móviles, que deben controlar el número de ejes de vehículos sujetos a peaje al pasar circulando o en el tráfico en contra.
Por el documento DE 10 2008 037 233 A1 es conocida la detección de ruedas de un vehículo que se mueve debido a su componente horizontal de la velocidad tangencial, diferente con respecto al vehiculo restante, que provoca un desplazamiento de frecuencia de Doppler correspondiente de un rayo de medición de radar. Para esto se usa un velocimetro de radar que irradia con un lóbulo de radiación de radar la zona inferior de vehiculos que pasan y promedia en el tiempo una única señal de medición de la velocidad a partir de la mezcla de frecuencias de recepción que ha recibido de vuelta, que muestra en los lugares de las ruedas máximos de señales que se usan para la detección de ruedas .
En las solicitudes de patente no publicadas previamente EP 11 450 079.6, EP 11 450080.4 Y PGTfEP 2012f061645 , el solicitante de la presente solicitud ha presentado procedimientos nuevos, particularmente no propensos a fallar y seguros para la detección de ruedas sobre la base de mediciones de Doppler.
El solicitante ha reconocido que para otra mejora de la seguridad de detección es deseable una orientación lo mejor posible del rayo de medición de Doppler a vehiculos que pasan circulando. En carreteras de varios carriles o carreteras con tráfico en contra, a menudo la separación de paso de un vehiculo en la unidad de detector es muy variable, ya sea en función del estilo de conducción o de las dimensiones del vehiculo. De esta manera, puede resultar una iluminación insuficiente de la rueda que debe detectarse con el rayo de medición con los consiguientes errores de detección.
La invención se fija como objetivo superar los problemas ilustrados y crear otro procedimiento mejorado para la detección de ruedas sobre la base de mediciones de Doppler.
Este objetivo se consigue de acuerdo con la invención con un procedimiento con las caracteristicas de la reivindicación 1 o de la reivindicación 2.
La invención se basa en recurrir a las llamadas unidades de a bordo (onboard-units (OSU) ) , que sirven para establecer peajes de usos de lugar de vehículos en sistemas de peaje y de comunicación para resolver los mencionados problemas. Las unidades de a bordo de este tipo pueden establecer en su camino comunicaciones por radio de corto alcance (dedicated short range communications, OSRC) con radiobalizas de carretera (roadside entíties, RSE) de posición conocida, por lo cual pueden localizarse en caso de comunicación por radio DSRe eficaz respectivamente en la zona de cobertura de radio de la radiobalíza. Son ejemplos de tales sistemas de peaje vinculados a infraestructuras apoyados por balizas sistemas de peaje de acuerdo con los estándares GEN-OSRG o ITS-WAVE (IEEE 802.11 p) . Pero también las unidades de a bordo de sistemas de peaje "sin balizas" apoyados por satélites en los que las unidades de a bordo se localizan ellas mismas de manera autónoma en un sistema de navegación por satélite (global navigation satellite system, GNSS) y envían sus datos de localización o datos de peaje generados a parlir de esto, por ejemplo a través de una red de telefonía móvil a una central, pueden estar dotadas adicionalmente de módulos de radio OSRG, ya sea para fines de lectura de controlo como llamadas "OBU hibridas", que pueden cooperar tanto con sistemas de peaje GNSS como DSRG.
Por el documento US 2003f0102997 A1 es conocido un sistema de evitación de colisiones sobre la base de OBU especiales que emiten señales de radar para la detección de radares de vehículos adyacentes. Al mismo tiempo, las señales de radar están moduladas con fines de comunicación para comunicarse con OBU de vehiculos adyacentes, que de esta manera pueden dar, por ejemplo, información más cercana sobre la posición para facilitar la detección de radares.
El procedimiento de la invención usa la capacidad de comunicación por radio de las unidades de a bordo para determinar a partir de una comunicación por radio en el paso de la unidad de detector de Ooppler las proporciones geométricas para la unidad de detector y determinar a partir de esto la separación de paso, lo cual se aprovecha a su vez para la orientación del rayo de medición de Doppler de la unidad de detector. Goma resultado, puede conseguirse una orientación individual, adaptativa y exacta del rayo de medición sobre las ruedas de un veh¡culo que está pasando, por lo cual pueden realizarse todos los tipos de procedimientos de evaluación de Doppler para la detección de ruedas, incluso con separaciones de vehículos variables con elevada certeza y exactitud.
Para establecer el sentido y la distancia medidos a partir de la comunicación por radio entre transceptor de la unidad de detector y unidad de a bordo del veh¡culo en una relación lo más exacta posible con respecto al sentido y la distancia del rayo de medición entre la unidad de detector y las ruedas del vehículo, es deseable conocer lo mejor posible la posición relativa de la unidad de a bordo sobre el vehiculo con respecto a las ruedas del vehiculo. Sin embargo, esta posición relativa puede va riar mucho dependiendo de la situación de montaje de la unidad de a bordo sobre el vehículo. A menudo, el usuario coloca las unidades de a bordo en el lado interior del parabrisas, generalmente en una posición prescrita, por ejemplo, en una esquina o arriba en la mitad del parabrisas. De acuerdo con la invención, la posición relativa se mide por separado para cada vehículo, de modo que el usuario no necesita respetar instrucciones de montaje determinadas o los montajes incorrectos son insignificantes. Para esto, en la primera variante de la invención la mencionada posición relativa es medida por un equipo de control estacionario o móvil y se guarda mediante una comunicación por radio en la unidad de a bordo y, para la mencionada consideración, la posición relativa guardada en la unidad de a bordo es leída mediante una comunicación por radio. En la segunda variante de la invención, para el mencionado fin, la mencionada posición relativa es medida por un equipo de control estacionario o móvil y se guarda en un banco de datos y, para la mencionada consideración, se selecciona la posición relativa guardada en el banco de datos.
El equipo de control que mide la posición relativa puede ser, por ejemplo, una de las radiobalizas de carretera (RSE) repartidas geográficamente de un sistema de peaje apoyado por balizas, y la mencionada medición de la posición relativa de la unidad de a bordo sobre un vehiculo puede llevarse a cabo en radiobalizas particularmente equipadas del mismo. En la mencionada primera forma de realización se guarda por si misma entonces la pOSición relativa medida en la unidad de a bordo y la misma la transporta hasta la lectura mediante la unidad de detector; en la mencionada segunda forma de realización se guarda la posición relativa en un banco de datos central o descentralizado para cada unidad de a bordo o cada veh¡culo hasta que una unidad de detector requiere y pide esta información.
En las dos últimas variantes mencionadas, la medición de la posición relativa puede realizarse preferentemente mediante elaboración de una imagen de exploración del vehículo con un escáner del equipo de control, mediante triangulación por radio de la unidad de a bordo con un transceptor del equipo de control y mediante referenciado de la triangulación por radio a la imagen de exploración. A este respecto, la triangulación por radio puede realizarse en particular mediante mediciones de fase en un conjunto... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la detección de una l1Jeda que gira (1) de un vehiculo (2) mediante evaluación del desplazamiento de Doppler de un rayo de medición (6) , que es irradiado por una unidad de detector (5) por la que ha pasado el vehiculo (2) , reflejado por la l1Jeda (1) y recuperado por desplazamiento de Doppler, presentando el vehiculo (2) en una posición relativa (R) a la l1Jeda (1 ) una unidad de a bordo (15) que puede establecer una comunicación por radio (23) con un transceptor (24) de ubicación (l) conocida en la unidad de detector (5) , que comprende:
medición de sentido (8) y distancia (2) de la unidad de a bordo (15) al transceptor (24) a partir de al menos una comunicación por radio (23) entre los mismos; y control del sentido de irradiación (o:, 13, y) o de la posición de irradiación (A) del rayo de medición (6) en función del sentido (8) y de la distancia (z) medidos y considerando la posición relativa (R) y la ubicación (l) mencionadas, midiéndose la mencionada posición relativa (R) por parte de un equipo de control (17) estacionario o móvil y guardándose mediante una comunicación por radio (23·) en la unidad de a bordo (15) , y leyéndose para la mencionada consideración la posición relativa (R) guardada en la unidad de a bordo (15) mediante una comunicación por radio (23) .
2. Procedimiento para la detección de una l1Jeda que gira (1) de un vehiculo (2) mediante evaluación del desplazamiento de Doppler de un rayo de medición (6) , que es irradiado por una unidad de detector (5) por la que ha pasado un vehiculo (2) , reflejado por la l1Jeda (1) Y recuperado por desplazamiento de Doppler, presentando el vehiculo (2) en una posición relativa (R) a la l1Jeda (1 ) una unidad de a bordo (15) que puede establecer una comunicación por radio (23) con un transceptor (24) de ubicación (l) conocida en la unidad de detector (5) , que comprende:
medición de sentido (8) y distancia (2) de la unidad de a bordo (15) altransceptor (24) a partir de al menos una comunicación por radio (23) entre los mismos; y control del sentido de irradiación (o:, 13, y) o de la posición de irradiación (A) del rayo de medición (6) en función del sentido (8) y de la distancia (z) medidos y considerando la posición relativa (R) y la ubicación (l) mencionadas, midiéndose la mencionada posición relativa (R) por parte de un equipo de control ( 17) estacionario o móvil y guardándose en un banco de datos (17, 19) , Y seleccionándose para la mencionada consideración la posición relativa (R) guardada en el banco de datos (17, 19) .
3. Procedimiento de acuerdo con las reivindicaciones 1 o 2, caracterizado por que la medición de la posición relativa (R) se realiza mediante elaboración de una imagen de exploración del vehiculo (2) con un escáner (26) del equipo de control (17) , mediante triangulación por radio de la unidad de a bordo (15) con un transceptor (21) del equipo de control (17) y mediante referenciado de la triangulación por radio a la imagen de exploración.
4. Procedimiento de acuerdo con la reivindicación 3, caracterizado por que la triangulación por radio se realiza mediante mediciones de fase en un conjunto de antenas del transceptor (21) del equipo de control (17) .
5. Procedimiento de acuerdo con las reivindicaciones 1 o 2, caracterizado por que la medición se realiza mediante elaboración de una imagen frontal del vehiculo (2) con una cámara y reconocimiento óptico de la posición (R) de la unidad de a bordo (15) en la imagen frontal.
6. Procedimiento de acuerdo con una de las reivindicaciones 1 a 5, caracterizado por que la medición del sentido
(8) y de la distancia (z) de la unidad de a bordo (15) con respecto al transceptor (24) se realiza mediante triangu lación por radio durante la comun icación por radio (23) entre los mismos.
7. Procedimiento de acuerdo con la reivindicación 6, caracterizado por que la triangulación por radio se realiza mediante mediciones de fase en un conjunto de antenas deltransceptor (24) de la unidad de detector (5) .
8. Procedimiento de acuerdo con una de las reivindicaciones 1 a 7, caracterizado por que el rayo de medición (6) es un rayo de radar y el control de su sentido de irradiación (a, 13, y) se realiza mediante control de fases de un conjunto de antenas (25) de la unidad de detector (5) .
9. Procedimiento de acuerdo con una de las reivindicaciones 1 a 8, caracterizado por que el rayo de medición (6) es un rayo de radar y el control de su posición de irradiación (A) se realiza mediante conmutación entre varias antenas (25') de la unidad de detector (5) .
10. Procedimiento de acuerdo con una de las reivindicaciones 1 a 9, caracterizado por que se detecta una l1Jeda
(1) cuando el transcurso temporal del desplazamiento de Doppler (L\f) muestra un salto (10) , una subida (11) , una caida (11) o una frecuencia de dispersión (F) respectivamente por encima de un valor umbral.
11. Procedimiento de acuerdo con una de las reivindicaciones 1 a 10, caracterizado por que la unidad de detector
(5) está configurada en forma de un vehículo de control.
12. Procedimiento de acuerdo con una de las reivindicaciones 1 a 11, caracterizado por que la comunicación por radio (23, 23') se realiza de acuerdo con los estándares CEN-D$RC o IT$-WAVE.
Patentes similares o relacionadas:
Procedimiento automático de asistencia al aterrizaje de una aeronave, del 22 de Abril de 2020, de Safran Electronics & Defense: Procedimiento de asistencia al aterrizaje de una aeronave en una pista de aterrizaje desde un punto de retorno (A) hasta un punto final (D) en el que la aeronave […]
Sistema de asistencia al pilotaje de una aeronave, en particular, de ayuda al aterrizaje, al apontaje y a la navegación, del 19 de Febrero de 2020, de THALES: Sistema de asistencia al pilotaje de una aeronave en la fase de aterrizaje o apontaje, que comprende unos medios de medición adecuados para realizar mediciones […]
Dispositivo para la gestión y control del tráfico, y apoyo a la conducción, del 7 de Noviembre de 2019, de ZAPATERO GARCIA, Julio: 1. Dispositivo de tráfico para gestión y control del tráfico para captación y suministro de información, que se caracteriza por tener forma de prisma en el que se diferencian […]
 Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Procedimiento de clasificación de vehículos en movimiento, del 30 de Octubre de 2019, de JENOPTIK ROBOT GMBH: Procedimiento de clasificación de vehículos , en el que se acotan vehículos al pasar por un cono de radar formado por una radiación […]
Dispositivo de tráfico para controlar la distancia de seguridad, del 6 de Junio de 2019, de ZAPATERO GARCIA, Julio: 1. Dispositivo de tráfico para controlar la distancia de seguridad entre vehículos que se caracteriza por tener forma cilíndrica en el que […]
SISTEMA DE POSICIONAMIENTO PARA MEDIO DE TRANSPORTE HYPERLOOP, del 18 de Octubre de 2018, de AUTO DRIVE SOLUTIONS S.L: Sistema de posicionamiento para el medio de transporte hyperloop que comprende un conjunto de lectores instalados en la vaina o pod que […]
Método y aparato para integración de sensores distribuidos y radar de vigilancia en aeropuertos para mitigar puntos ciegos, del 24 de Mayo de 2017, de RAYTHEON COMPANY: Un método que comprende: emplear un primer radar ; identificar un punto ciego en cobertura del primer radar; proporcionar […]
Sensor de radar integrado en la calzada, del 17 de Mayo de 2017, de VOLTRA solutions GmbH: Dispositivo para el registro de informaciones de tráfico con al menos un dispositivo de sensor dispuesto de modo insertado en la calzada , en el que […]