Procedimiento para generar un registro digital y una unidad de carretera de un sistema de peaje de carreteras que implemente el procedimiento.
Sección de la CIP Física
(05/02/2020). Inventor/es: NAGY, OLIVER, ÖHRENEDER,CHRISTIAN, GÄRTNER,ANDREAS. Clasificación: G08G1/04, G07B15/06.
Un procedimiento para generar un registro digital (E) de un vehículo en un sistema de peaje de carreteras , que comprende, en una unidad de carretera del sistema de peaje de carreteras :
capturar una imagen (P) del vehículo en una carretera por medio de una cámara de la unidad de carretera ;
generar un registro digital (E); y
enviar el registro digital (E) desde la unidad de carretera a un centro de datos del sistema de peaje de carreteras ,
caracterizado por
comprimir en datos la imagen (P) con una relación de compresión (R) en función al menos de un nivel de confianza (Li, LA) obtenido a partir de la imagen (P) para uno o más caracteres (Ci) por medio del OCR para generar el registro digital (E).
PDF original: ES-2786274_T3.pdf
Método para detectar un punto de peaje virtual.
Sección de la CIP Física
(15/01/2020). Inventor/es: POSCHINGER,CHRISTIAN, SIEGL,THOMAS. Clasificación: G07B15/06.
Método para detectar el paso por un punto de peaje virtual (TP) por parte de un vehículo que circula en una red de carreteras, que comprende las etapas en el siguiente orden:
a) calcular una secuencia de distancias (di) entre puntos de posición (pi) y el punto de peaje virtual (TP), obteniéndose secuencialmente dichos puntos de posición (pi) a partir de un receptor GNSS llevado por el vehículo ;
b) buscar en dicha secuencia de distancias (di) un mínimo global (M) seguido por un incremento (I) y, si se encuentra el mismo,
a continuación
c) detectar el paso por el punto de peaje virtual (TP);
si no
d) añadir una nueva distancia (di+1) calculada entre un punto de posición recién obtenido (pi+1) y el punto de peaje virtual (TP) a la secuencia mientras se descarta la distancia más antigua (di-N) de la secuencia, y volver a la etapa b).
PDF original: ES-2784599_T3.pdf
Procedimiento para calibrar la imagen de una cámara.
(04/09/2019) Procedimiento para calibrar la imagen (3I, 3II) de una cámara 1, en particular una cámara de vigilancia del tráfico, con respecto a su espacio visual, para lo cual se determinan los parámetros de proyección de cámara (mkl) de una proyección de cámara del espacio visual sobre la imagen, caracterizado por las etapas de:
habilitar un soporte 5 móvil con al menos cuatro marcas visibles por la cámara que confinan un volumen y forman unos primeros puntos mundiales conocidos (wi) en el espacio visual,
tomar una primera imagen (3I) del espacio visual,
desplazar el soporte en el espacio visual con un decalaje desconocido (v) para obtener unos segundos puntos…
Un procedimiento para predecir un comportamiento del tráfico en un sistema de carreteras.
(17/07/2019) Un procedimiento para predecir un comportamiento de tráfico en un sistema de carreteras, que comprende los siguientes pasos realizados por al menos un procesador conectado a una base de datos , que contiene un conjunto de tráfico perfiles , con cada perfil de tráfico que representa una medida de tráfico de vehículos en el sistema de carreteras registrado a lo largo del tiempo (t), con una o más etiquetas predefinidas (T) asociadas con un tiempo de registro del perfil de tráfico respectivo atribuido a dicho perfil de tráfico :
agrupar los perfiles de tráfico con sus etiquetas (T) en al menos dos grupos (CLi) en cuanto a la similitud de los perfiles de tráfico ;
asignar al menos un vector característico (CVj) a cada grupo (CLi) basándose en las etiquetas (T) en este grupo (CLi), en el que cada vector…
Procedimiento para registrar vehículos de motor sujetos a peaje en vías de comunicación de peaje y para poner a disposición información sobre los vehículos de motor registrados.
(04/10/2018) Procedimiento para registrar vehículos de motor sujetos a peaje en vías de comunicación de peaje y para poner a disposición información sobre los vehículos de motor registrados, en donde junto a las vías de comunicación de peaje o en las mismas están previstos unos dispositivos estacionarios y/o parcialmente móviles de control de peaje y en donde cada dispositivo de control de peaje tiene asignada una microcélula radioeléctrica o picocélula radioeléctrica que funciona según el estándar de red de radiotelefonía móvil 2G/3G, pero no está conectada a un controlador de estación base de la red de radiotelefonía móvil, y que tiene asignado un identificador de célula…
Procedimiento para detectar una rueda de un vehículo.
(05/04/2017) Procedimiento para detectar una rueda en rotación de un vehículo por evaluación del desplazamiento Doppler de un rayo de medida que es irradiado por una unidad detectora sobrepasada por el vehículo , reflejado por la rueda y recuperado en forma desplazada por efecto Doppler,
en el que el vehículo presenta en una posición relativa (R) con respecto a la rueda una unidad embarcada que puede establecer una radiocomunicación con un receptor de emisión de situación conocida (L) en la unidad detectora , cuyo procedimiento comprende:
medición de la dirección (δ) y la separación (z) de la unidad embarcada con respecto al emisor de recepción a partir de al menos una radiocomunicación entre éstos; y control de la dirección de irradiación (α, β,…
Procedimiento para el procesado electrónico de una infracción de tráfico y unidad a bordo para ello.
(22/03/2017) Procedimiento para el procesado electrónico de una infracción de tráfico (rec) de un vehículo , que tiene una unidad a bordo con un emisor-receptor , una instalación de entrada y una instalación de salida , que incluye:
envío de una notificación de infracción de tráfico (rec) desde una baliza al emisor-receptor de la unidad a bordo y salida de la notificación de infracción de tráfico (rec) a la instalación de salida de la unidad a bordo ;
recepción de una elección del usuario (y/n) referente a dos opciones sobre la instalación de entrada de la unidad a bordo ;
si la elección del usuario (y/n) proporciona la primera opción (n),…
Unidad de a bordo y procedimiento para la actualización de geodatos en su interior.
(15/03/2017) Unidad de a bordo para el pago de peaje de un vehículo, con
un receptor de navegación por satélite para la generación de puntos fijos de posición (pi);
con una memoria para el registro de geoobjetos (obj);
con una interfaz de radio ; y
con un procesador conectado en estos componentes , que está configurado para generar a parte de una comparación geográfica de puntos fijos de posición (pi) con geoobjetos (obj) en un mapa digital datos de peaje (tr); y para enviarlos a través de la interfaz de radio ,
caracterizada por que la memoria presenta:
una zona de memoria de índices (M3), en la que está registrado un árbol de índice para geoobjetos (obj), cuyas ramas más exteriores (b1) están asociadas, respectivamente, a una celda (cm) del mapa digital y llevan una hoja (lvm)…
Procedimiento para la carga de una unidad de a bordo con un tique electrónico.
(15/03/2017) Procedimiento para la carga de una unidad de a bordo con un tique electrónico y canjeo del mismo o de un tique derivado del él (3') en una radiobaliza de un sistema telemático de transporte , en donde la unidad de a bordo tiene una interfaz DSRC para la comunicación por radio con la radiobaliza y una segunda interfaz separada de la interfaz DSRC para la comunicación por radio con un teléfono móvil , que comprende:
equipamiento de la unidad de a bordo con una clave electrónica pública y una privada (PubK.OBU, PrivK.OBU) de la unidad de a bordo ;
en el teléfono móvil , recepción de la clave de unidad de a bordo…
Dispositivo y procedimiento para la detección de un eje de rueda de un vehículo.
Sección de la CIP Física
(25/01/2017). Inventor/es: NAGY, OLIVER. Clasificación: G01S13/58, G01S13/91, G01S13/52, G08G1/015, G01S13/86, G01S7/41.
Dispositivos para la detección de un eje de rueda de un vehículo en marcha sobre una calzada , comprendiendo:
una pluralidad de sensores de radar (Rn), los cuales tienen radar-transceptores (Tn) dispuestos repartidos en una estructura de soporte transversal por encima de la calzada y por medio de un rayo de medición (Bn) orientado aproximadamente hacia abajo de su radar-transceptor (Tn) en momentos sucesivos generan, respectivamente, un valor de medición de la velocidad de Doppler (vn) para un objeto que reflecta el rayo de medición de radar (Bn), y
una unidad de evaluación (A) conectada a salidas de valores de medición de los sensores de radar (Rn), la cual está configurada para detectar un eje de rueda si dos sensores de radar (Rn, Rn-x) generan, dentro de una ventana temporal de tolerancia (W), máximos (vn,p, vn-x,p) esencialmente de igual magnitud, o en lugar de esto mínimos esencialmente de igual magnitud, que sus valores de la medición de velocidad (vn, vn-x).
PDF original: ES-2622928_T3.pdf
Unidad de a bordo para un sistema de identificación vehicular.
(12/10/2016) Una unidad de a bordo para comunicarse con un sistema de identificación vehicular , en particular un peaje de carretera, la administración de un lugar de estacionamiento o un sistema de acceso, que comprende:
una carcasa que se puede fijar a una superficie exterior de un parabrisas de un vehículo ; un transceptor para la comunicación de radio con el sistema de identificación ; y
un procesador acoplado al transceptor y configurado para comunicarse con el sistema de identificación por intermedio del transceptor ;
estando contenidos el transceptor y el procesador en dicha carcasa ;
caracterizada por que
la unidad de a bordo comprende una unidad de protección contra manipulaciones indebidas que está dividida…
Equipo de a bordo y procedimiento para el control funcional en un sistema de peaje vial.
(03/08/2016) Equipo de a bordo para un sistema de peaje vial ,
con un receptor de navegación satelital para la generación continua de determinaciones de posición (pi) y valores de medición de calidad (qi) correspondientes a partir de datos primarios satelitales (ri),
un radiotransmisor receptor y
conectado a dichos componentes un procesador configurado para generar datos de peaje (M) a partir de las determinaciones de posición (pi) y transmitir los mismos por medio del radiotransmisor receptor ,
caracterizado por
un detector de fallos conectado a un receptor de navegación satelital , que está configurado para responder…
Procedimiento para la liquidación de utilizaciones locales.
(27/07/2016) Procedimiento para la liquidación de utilizaciones locales de equipos vehiculares en un sistema de peaje vial mediante un sistema de transacciones de pago separado, teniendo el sistema de peaje vial un servidor de peaje , al menos una terminal de peaje y al menos un subsistema para la detección de las utilizaciones locales y el sistema de transacciones de pago tiene un servidor de transacciones y al menos una terminal de transacciones para tarjetas de pago , estando cada terminal de transacciones asignada a una o más terminales de peaje , incluyendo:
entrada de un indicativo (OID) de un equipo vehicular a la terminal de peaje ;
generación en la terminal de peaje de un indicativo de transacción (TID)…
Procedimiento para comprobar transacciones de peaje y componentes para ello.
(22/06/2016) Procedimiento para comprobar transacciones de peaje que se generan a partir de avisos de posición de un teléfono móvil que está conectado con un servidor de transacciones por medio de una red de telefonía móvil , con ayuda de una red de balizas de peaje distribuidas que pueden comunicarse con unidades de a bordo de vehículos que pasan a través de radio de corto alcance y que están conectadas con el servidor de transacciones , que comprende:
llevar un teléfono móvil y una unidad de a bordo en un vehículo ;
generar un indicativo de sesión (SID), intercambiar el indicativo de sesión (SID) entre el teléfono móvil y la unidad de a bordo y enviar el indicativo de sesión (SID) al servidor de transacciones ;
generar avisos de posición (posi) en el teléfono móvil y enviar los…
Procedimiento y radiobaliza para la localización de una unidad de a bordo.
(15/06/2016) Proceso para la localización de una unidad de a bordo , que tiene un receptor de emisión de radio y una identificación (TP), en una zona prefijada alrededor de una radiobaliza , que comprende:
a) almacenar en una base de datos la identificación (TP) de la unidad de a bordo y una característica de radio (sens, cg) de su receptor de emisión de radio ;
b) enviar una primera petición (rq1) con una primera potencia de emisión (Pmx) de la radiobaliza ;
c) captar en la radiobaliza una primera respuesta (rsp1), la cual contiene la identificación (TP) y una identificación de OBU (TID) inequívoca de una unidad de a bordo y almacenar la identificación de OBU (TID) en una lista de presencia (PRL);
d) determinar la característica de radio (sens, cg) asociada a la identificación (TP) captada del receptor de…
Programación mejorada de transpondedor en un sistema de peaje de carretera abierta.
(11/05/2016) Un sistema de comunicación de transpondedor para su uso en un sistema de cobro de peaje electrónico para la programación de un transpondedor situado en un vehículo en movimiento que se desplaza en una carretera, teniendo el transpondedor una memoria, comprendiendo el sistema:
una primera antena que tiene una primera área de cobertura que incluye al menos una porción de la carretera, y una segunda antena que tiene una segunda área de cobertura que incluye al menos una porción de la carretera, siendo la segunda área de cobertura diferente de la primera área de cobertura, cada una para transmitir una señal de programación y para recibir…
Métodos y sistemas para la determinación de la posición de vehículos en un sistema automático de identificación de vehículos.
(27/04/2016) Un metodo de estimacion de ubicacion de vehiculos en una carretera con una direccion de marcha que utiliza un sistema automatico de identificacion de vehiculos, incluyendo el sistema una antena direccional (18, 104, 106, 204, 302, 402a-402e, 602, 604, 606) que define un area de cobertura para comunicacion con un transpondedor a bordo del vehiculo en la carretera , estando el metodo caracterizado por: transmitir una senal de onda continua a lo largo de la antena;
recibir un conjunto de senales de respuesta moduladas que contienen informacion de comunicacion por medio de modulacion de retrodispersion de la senal de onda continua procedente del transpondedor en los puntos de tiempo (t1-t5) y determinar una tasa de variacion de alcance del transpondedor en relacion con la antena (18, 104, 106, 204, 302, 402a-402e, 602, 604, 606)…
Pórtico para extenderse sobre una zona de tráfico.
(27/04/2016) Un pórtico para extenderse sobre una zona de tráfico, que comprende un poste que tiene un brazo que se proyecta lateralmente en la parte superior para montar los componentes sobre el mismo, en el que cada uno del poste y del brazo se fabrican de un elemento de construcción longitudinal hecho de un material sintético con cámaras huecas , y
en el que el citado poste tiene un pivote para hacer pivotar el brazo que se proyecta desde el mismo alrededor de un eje vertical (V), caracterizado porque
el pórtico tiene dos postes , teniendo cada poste un brazo , en el que cada uno de los postes y de los brazos están fabricados del citado elemento de construcción longitudinal y al menos uno de los postes tiene el citado pivote para pivotar…
Ventana de contención adaptativa en canales de comunicación inalámbrica discontinua.
(20/04/2016) Método para la comunicación inalámbrica discontinua en un sistema de acceso de contención, en el que el acceso a un canal de comunicación está limitado a intervalos de canal periódicos, en el que, en caso de detección de un fallo en la transmisión, se aleatoriza un tiempo de espera antes de la retransmisión en una ventana de contención (CW), cuyo tamaño es ajustado dinámicamente entre una ventana de contención mínima y una máxima (CWmin, CWmax) tras transmisiones con éxito y transmisiones fallidas, respectivamente, comprendiendo el método:
estimar la probabilidad de colisiones de canal al inicio de un intervalo siguiente del canal sobre la base de al menos…
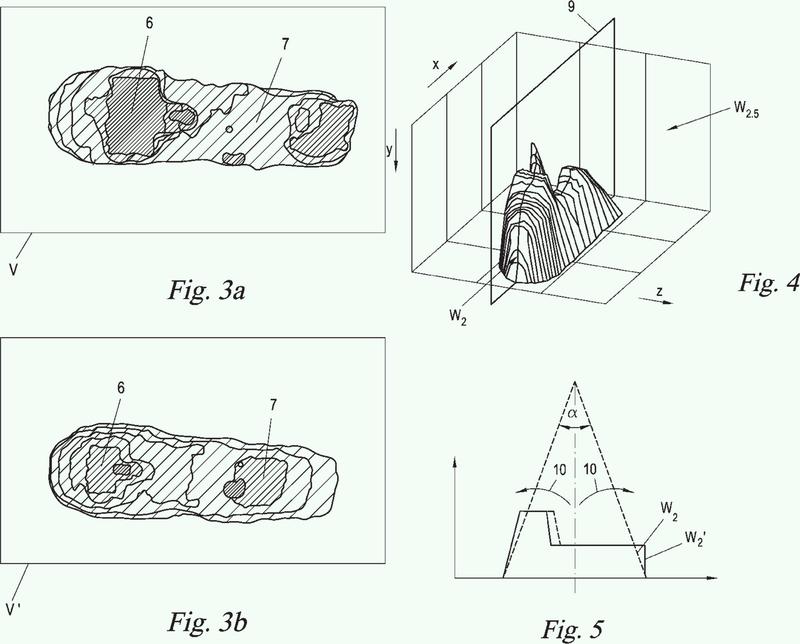
Procedimiento para medir un perfil de altura de un vehículo que pasa por una carretera.
Sección de la CIP Física
(30/03/2016). Ver ilustración. Inventor/es: KOTZ,CHRISTIAN, RAFELSBERGER,OLIVER, JANNER,CHRISTIAN. Clasificación: G08G1/04, G01B11/06.
Procedimiento para la medición de un perfil de altura (W2.5, W2.5', W2, W2' ) de un vehículo que pasa en una carretera , que comprende:
la orientación de una cámara monocular desde un punto por encima de la carretera hacia la carretera con un ángulo de apertura (α, β) que alcanza desde arriba una sección de la carretera , la toma de al menos una primera imagen (F1) del vehículo que pasa, mediante la cámara , en un primer momento (t1), la toma de al menos una segunda imagen (F2) del vehículo que pasa, mediante la cámara , en un segundo momento (t2),
la generación de una imagen vectorial de movimiento (V, V') del vehículo a partir de un análisis del flujo óptico (F) entre la primera y la segunda imagen (F1, F2), y
la creación del perfil de altura (W2.5, W2.5', W2, W2' ) del vehículo a partir de la imagen vectorial de movimiento (V, V').
PDF original: ES-2573629_T3.pdf
Procedimiento para el calibrado de una unidad de disparo y sensor conectable en cascada correspondiente.
(10/03/2016) Procedimiento para el calibrado de una unidad de disparo , que está conectada mediante una línea de disparo a al menos dos sensores que pueden ser disparados, cada uno de los cuales está conectado entre dos tramos de línea (2a, 2b, 3c) sucesivos de la línea de disparo , presentando cada sensor una entrada para uno y una salida para el otro tramo de línea (2a, 2b, 2c), un disyuntor controlable entre la entrada y la salida y un circuito de control que está conectado a la entrada , que controla el disyuntor , estando inicialmente abiertos los disyuntores de todos los sensores , con las etapas:
emisión de un impulso de disparo de la unidad de disparo a través de al menos un tramo de línea…
Procedimiento para enviar mensajes en redes ad-hoc.
(03/03/2016) Procedimiento para enviar y recibir de manera inalámbrica mensajes (Mi) en una red ad-hoc asincrónica con una pluralidad de nodos de red (Ni), de los que al menos un primer nodo de red (N1) envía de manera periódica mensajes (Mi) con una duración de período (P1) previamente establecida, caracterizado por las siguientes etapas realizadas en un segundo nodo de red (N2):
fijar al menos dos intervalos de tiempo (Tm, Tm+1) sucesivos en cada caso con la longitud de una duración de período (P), de los que un primer intervalo de tiempo (Tm) está situado en el pasado y un segundo intervalo de tiempo (Tm+1) está situado en el futuro, y dividir los intervalos de tiempo (Tm, Tm+1) en cada caso en al menos dos ranuras de tiempo (Sm,n, Sm+1,n);
calcular una medida de ocupación (Bm,n, wBm,n) para…
Unidad de a bordo y procedimiento para la información a un conductor.
(22/02/2016) Unidad de a bordo para un vehículo (Ci) para la información al conductor al circular por una sección de carretera (Sn) con al menos dos carriles (Tn,m) adyacentes que forman una superficie de circulación común, teniendo la unidad de a bordo un dispositivo de detección de posición para determinar su posición (P) y disponiendo de un valor de medición de su velocidad (v), caracterizada por
un detector de carriles conectado al dispositivo de detección de posición con una memoria de mapas para un mapa de carreteras digital para localizar en el mapa de carreteras un carril (Tn,m) correspondiente a la posición (P) determinada,
un detector de retenciones para la detección de una retención de tráfico cuando al menos el valor de medición de velocidad (v) queda por debajo de un valor umbral predefinido…
Procedimiento para la lectura de matrículas de vehículo.
(22/02/2016) Procedimiento para la lectura de matrículas de vehículo mediante OCR en una red de carreteras , que comprende:
la toma de imagen de una matrícula de vehículo en un primer lugar (Ai) en la red de carreteras , la lectura OCR de una cadena de caracteres de matrícula en la toma de imagen y el almacenamiento de un bloque de datos OCR (19'i) incluyendo dicha toma de imagen de matrícula dicha cadena de caracteres de matrícula y al menos una medida de confianza (Ci,n, Ø Ci) de dicho proceso de lectura OCR en una base de datos ;
la toma de imagen de una matrícula de vehículo en un segundo lugar (Bj) en la red de carreteras , la lectura OCR de una cadena de caracteres de matrícula en la toma de imagen y la generación de un bloque de datos OCR actual (19") incluyendo dicha…
Comunicación adaptativa en un sistema de cobro electrónico de peajes.
(19/02/2016) Un sistema de comunicación adaptativo para comunicarse con un transpondedor localizado en un vehículo en movimiento que circula sobre una calzada, teniendo el transpondedor una memoria de transpondedor para almacenamiento de datos de tipo de configuración, estando el sistema caracterizado por:
al menos una antena (18A, 18B, 18C) que tiene un área de cobertura (26A, 26B, 26C) que incluye al menos una parte de la calzada para recibir, en una primera comunicación con el transpondedor , los datos de tipo de configuración desde la memoria del transpondedor, en donde los datos de tipo de configuración incluyen al menos un tipo de vehículo, una clase de vehículo, un tamaño de vehículo,…
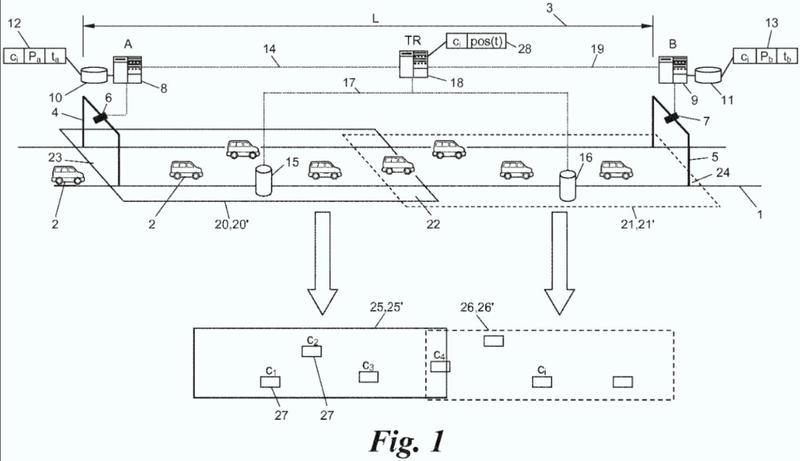
Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad.
Sección de la CIP Física
(16/02/2016). Ver ilustración. Inventor/es: Abl,Alexander. Clasificación: G08G1/054, G01S13/86, G01S13/66.
Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que comprende:
registrar el tiempo de entrada (ta) de un vehículo en la entrada , generar una identificación de objeto (ci) para el vehículo inequívoca e independiente de la identidad real del vehículo y almacenar el tiempo de entrada (ta) bajo la identificación de objeto (ci),
seguir el movimiento del vehículo que se referencia a este respecto de manera continua mediante la identificación de objeto (ci) y durante todo el tramo con ayuda de una disposición de sensores (TR), registrar el tiempo de salida (tb) del vehículo referenciado mediante la identificación de objeto (ci) en la salida , y
si una comparación del tiempo de salida (tb) registrado con el tiempo de entrada (ta) almacenado indica una velocidad que supera un valor umbral (s): registrar una imagen de salida (Pb) del vehículo en la salida.
PDF original: ES-2559827_T3.pdf
Procedimiento para autentificar una etiqueta RFID.
(11/02/2016) Procedimiento para autentificar una etiqueta RFID con la ayuda de un lector RFID a través de una interfaz de radiofrecuencia entre ellos, estando memorizada en el lector RFID una clave específica de usuario (Ki) y estando memorizadas en la etiqueta RFID una identificación específica de la etiqueta y una contraseña (PW) generada a partir de la identificación (TID) y la clave (Ki), según una función de derivación conocida, y reenviando, a través de la interfaz de radiofrecuencia , una etiqueta RFID auténtica una respuesta de confirmación (hdl) solo al recibir la contraseña correcta (PWr), por el contrario, una etiqueta RFID…
Cancelación de eco adaptativo para sistemas de RFID.
(20/01/2016) Un método de calibración de un lector para la cancelación de eco en un sistema de RFID, incluyendo el lector una sección de transmisor para generar una señal de portadora y una sección de receptor acoplada a una antena a través de un primer interruptor para recibir una señal de retrodispersión modulada, incluyendo la sección de receptor un cancelador de eco que incluye un combinador para combinar la señal de retrodispersión modulada con una señal de cancelación para producir una señal corregida, y un convertidor descendente acoplado a la salida del combinador para producir una señal combinada convertida descendente usando la señal de portadora, comprendiendo el método:
abrir el primer interruptor para…
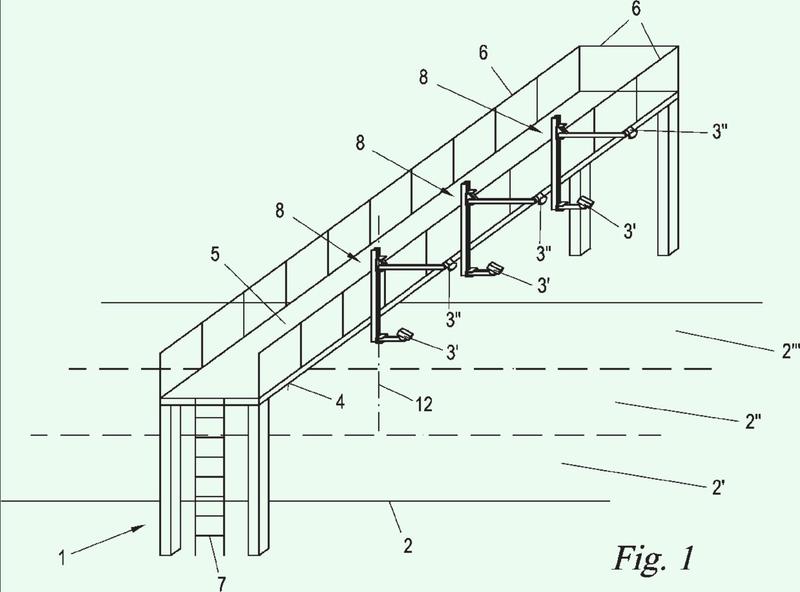
Dispositivo y puente de montaje para suspender un componente.
Sección de la CIP Construcciones fijas
(12/01/2016). Ver ilustración. Inventor/es: HACKL,LEOPOLD, TRÖGL,ARNOLD. Clasificación: E01F9/011.
Dispositivo para la suspensión de al menos un componente de un puente de montaje, con
un carril guía que puede fijarse al puente de montaje , estando orientado de forma aproximadamente vertical, y con un carro que está guiado de forma deslizable sobre el carril guía y sobre el que se puede montar el componente , caracterizado por
un tope de fin de carrera soportado de forma ajustable en altura sobre el carril guía , por debajo del carro , estando dividido el carril guía en una parte inferior (9') y en una parte superior (9") que están unidas entre ellas a través de una unión pivotante con un eje de giro paralelo al sentido longitudinal del carril guía.
PDF original: ES-2555997_T3.pdf
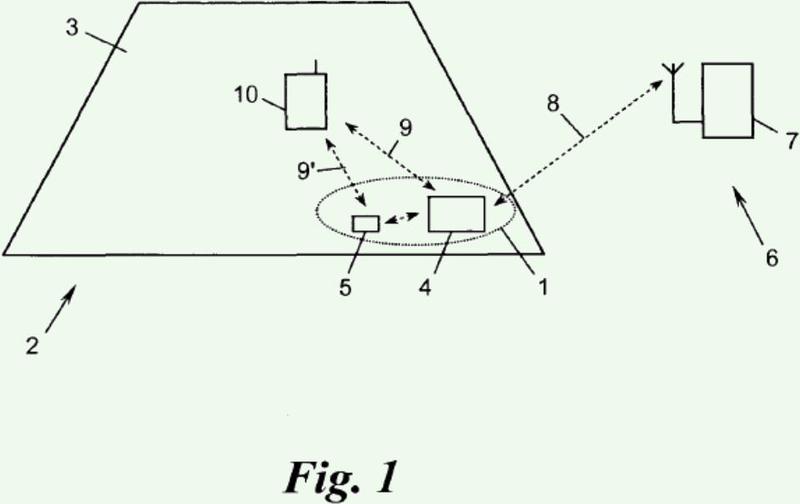
Instalación de a bordo para un vehículo.
Secciones de la CIP Física Electricidad
(04/01/2016). Ver ilustración. Inventor/es: NAGY, OLIVER, Povolny,Robert. Clasificación: G08G1/017, H04W4/00, G07B15/06.
Unidad de a bordo para un sistema de tráfico telemático , que comprende:
un primer módulo de comunicación realizado para la radiocomunicación de corto alcance con un primer aparato de comunicación externo,
un segundo módulo de comunicación realizado para la radiocomunicación de largo alcance con un segundo aparato de comunicación externo, y
una memoria no volátil, a la que pueden acceder tanto el primer como el segundo módulos de comunicación ,
teniendo cada módulo de comunicación un modo de comunicación alimentado con energía y un modo de reposo exento o ahorrativo de energía y
realizándose la alimentación de energía de la memoria durante el acceso a la misma por medio del respectivo módulo de comunicación que accede a la misma.
PDF original: ES-2555468_T3.pdf
Unidad de a bordo y servidor de transacciones para un sistema de peaje de carreteras.
(30/12/2015) Unidad de a bordo para un sistema de peaje de carreteras, que comprende un receptor de satélite para generar una secuencia de fijos de posición (pi) a partir de señales de posición de una red global de satélites, un módulo de telefonía móvil para la comunicación a través de una red de telefonía móvil con un servidor de transacciones alejado y un procesador (3') conectado al receptor de satélite y que controla el módulo de telefonía móvil , caracterizado por que el procesador está configurado para generar en un primer estado de funcionamiento, a partir de la secuencia de fijos de posición (pi), mediante una reducción de datos, una secuencia de mensajes de posición…
Procedimiento para suministrar servicios de datos locales.
(20/05/2015) Procedimiento para el suministro de servicios de datos locales a vehículos que están equipados tanto con unidades de a bordo para la comunicación de corto alcance con balizas de peaje en posiciones (pos) conocidas en un sistema de peaje de carreteras, así como también terminales móviles para la recepción de datos en una red de telefonía móvil , en donde las unidades de a bordo tienen identificaciones de aparato inequívocas (OID), los terminales móviles tienen identificaciones de usuario inequívocas (MID) y los servicios de datos tienen identificaciones de servicios inequívocas (SID) y están instalados en uno o varios servidores de aplicación conectados a la red de telefonía móvil y se conectan con las balizas…
{kind=link}
{kind=link}
{kind=link}
{kind=link}