CIP-2021 : B25J 15/00 : Cabezas de aprehensión.
CIP-2021 › B › B25 › B25J › B25J 15/00[m] › Cabezas de aprehensión.
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 15/02 · servocontroladas.
B25J 15/04 · con posibilidad para el levantamiento o el cambio a distancia de la cabeza o de partes de ésta.
B25J 15/06 · con medios de retención magnéticos o que funcionan por succión.
B25J 15/08 · teniendo elementos en forma de dedos (B25J 15/02, B25J 15/04 tienen prioridad).
B25J 15/10 · · con tres o más elementos en forma de dedos.
B25J 15/12 · · con elementos en forma de dedos flexibles.
CIP2021: Invenciones publicadas en esta sección.
Transporte de recipientes de líquido en un aparato de análisis automático.
(02/04/2019) Aparato de análisis automático que comprende un primer y un segundo dispositivo de recepción con respectivamente una pluralidad de posiciones de recepción para recipientes de líquido, y un dispositivo fijado en un brazo de transferencia que puede desplazarse automáticamente, para la transferencia de un recipiente de líquido desde una posición de recepción en el primer dispositivo de recepción a una posición de recepción en el segundo dispositivo de recepción , donde el dispositivo para la transferencia de un recipiente de líquido comprende un elemento de sujeción por apriete pasivo con dos brazos del elemento de sujeción , entre los cuales, a través de un desplazamiento…
Mandril de manipulación de piezas de trabajo.
(27/03/2019) Un mandril de manipulación de piezas, el mandril que comprende un manguito de mandril y un pasador de expulsión colocados dentro del mandril de sujeción , un elemento de sujeción elástico (1a) provisto en el extremo delantero del mandril de sujeción , pudiendo moverse el pasador de expulsión entre una primera posición y una segunda posición a lo largo de la dirección axial del mandril de sujeción , en donde, cuando el pasador de expulsión está en la primera posición, la circunferencia exterior del pasador de expulsión extruye el elemento de sujeción (1a) para distorsionar y expandir hacia afuera para formar un estado…
Dispositivo de transporte de objetos de procesamiento y sistema de corte.
(20/03/2019) Dispositivo de transporte de objetos de procesamiento, que comprende:
un almacenador que está configurado para alojar una pluralidad de objetos de procesamiento ;
una unidad transportadora que está configurada para sacar del almacenador uno de los objetos de procesamiento que están alojados en el almacenador ;
un mecanismo de movimiento que está configurado para mover la unidad transportadora en una dirección tridimensional respecto al almacenador ; y
un controlador que está configurado para controlar el mecanismo de movimiento , en el que un adaptador que tiene una primera proyección de acoplamiento (8b) formada en un extremo en una primera dirección y una segunda proyección de acoplamiento (8c) formada en el otro extremo en un lado opuesto al extremo…
Elemento de agarre para botellas y soporte de elemento de agarre para botellas.
(20/03/2019) Elemento de agarre para botellas que comprende un alojamiento sustancialmente cilíndrico y un manguito elástico y un inserto , en el que el manguito elástico tiene, en su estado no deformado, una parte cilíndrica y en el que el manguito elástico está dispuesto en el alojamiento y adaptado para ser deformado radialmente hacia dentro cuando se introduce un fluido a presión en un espacio circular radialmente fuera del manguito , en donde el espacio circular está formado entre un orificio circular del alojamiento y la parte del manguito en su estado deformado; en donde el inserto está posicionado en el alojamiento y el manguito , comprendiendo el inserto una parte…
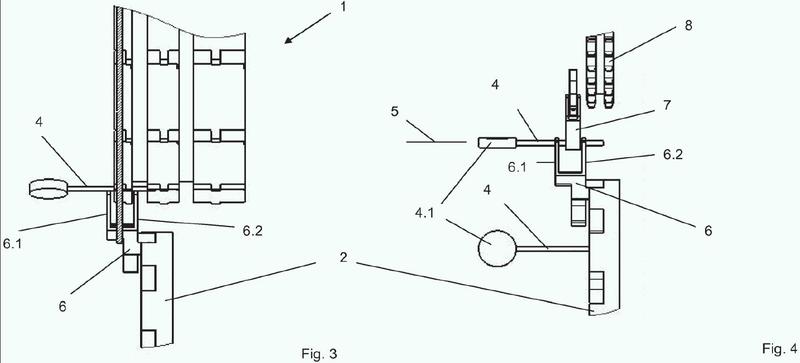
(13/03/2019). Solicitante/s: Yaskawa Nordic AB. Inventor/es: GENEFKE,BO.
Unas pinzas adaptadas para usarse en un sistema automático para manipular sustratos flexibles proporcionados en una pila , pudiendo disponerse de forma rotatoria dichas pinzas en un brazo de un robot y comprendiendo un dedo inferior y un dedo superior , en donde dicho dedo inferior comprende un borde afilado en forma de cuña , que está adaptado para permitir la inserción de dicho dedo inferior entre sustratos de dicha pila , caracterizadas por que dicho dedo inferior tiene una punta redonda , que se extiende a al menos un lado del dedo inferior y forma un borde liso en forma de cuña , y por que dicho borde afilado en forma de cuña , está dispuesto en dicho al menos un lado lejos de dicha punta y sustancialmente a nivel con dicho borde liso en forma de cuña pero sobresaliendo del mismo.
PDF original: ES-2720549_T3.pdf
Grupo para posicionar elementos de protección dentro de un envase rígido y método para posicionar tales elementos de protección.
(05/03/2019) Un grupo para posicionar un elemento (P) para proteger artículos (A), tales como placas de cerámica o azulejos dispuestos apilados dentro de un envase rígido o caja (B) en un espacio intermedio (I) dentro del envase rígido o caja (B) alrededor del perímetro lateral de los artículos (A) entre dicho envase rígido o caja (B) y dichos artículos (A), comprendiendo dicho grupo de posicionamiento y agarre un bastidor de soporte, medios de acoplamiento rápido que se pueden conectar a un brazo de un robot, una pinza conectada a dicho bastidor de soporte, en donde dicha pinza está formada para retener dicho elemento (P) de protección y para liberarlo a dicho espacio intermedio (I), comprendiendo dicho elemento (P) de protección una carcasa (P1) y un material (P2) de relleno,…
Herramienta de manipulación para producir una pieza de material plástico reforzada.
(27/02/2019). Solicitante/s: Plastic Omnium Auto Exterieur Services. Inventor/es: Ménard,Magalie, RICHARD,FRÉDÉRIC, COMPAGNON,PHILIPPE, MORESSEE,AURÉLIEN.
Herramienta de manipulación para producir una pieza de material plástico que comprende al menos un elemento de refuerzo hecho de al menos un inserto fibroso hecho de un material compuesto, comprendiendo la herramienta de manipulación un área de conformación dispuesta para recibir y aguantar el inserto fibroso, comprendiendo el área de conformación un sistema de formación hecho de elementos independientes móviles , siendo capaz el sistema de formación de impartir la forma de un lado del elemento de refuerzo al inserto fibroso,
caracterizada por que la herramienta de manipulación comprende un área de agarre dispuesta en una segunda cara ortogonal a una primera cara en la que se dispone el área de conformación , estando adaptada el área de agarre para mantener al menos un inserto.
PDF original: ES-2725462_T3.pdf
Método y aparato para formar un pirulí plano.
(13/02/2019). Ver ilustración. Solicitante/s: GEA Food Solutions Weert B.V. Inventor/es: BAUMEISTER,BRUNO GERFRIED.
Método para producir un pirulí con una cabeza de pirulí , en el que se moldea una masa en una cabeza de pirulí plana en un aparato de moldeo , en la que se inserta un palo , en el que el pirulí es transferido a medios de transporte con pinzas que agarran el palo del pirulí y transportan el pirulí hacia fuera, caracterizado por que la cabeza de pirulí es mucho mayor en dos direcciones, la dirección-x y la dirección-y que en una tercera dimensión, la dimensión-z y por que el pirulí es t6ransportado por una cadena de transporte con la dirección-x y la dirección-x paralelas a un plano horizontal, en donde después de la transferencia y durante el transporte, el palo del pirulí está agarrado siempre por unas pinzas, de tal manera que el pirulí no puede girar.
PDF original: ES-2721633_T3.pdf
UN SISTEMA AUTOMATIZADO DE CONSTRUCCIÓN ROBOTIZADO Y MÉTODO DE CONSTRUCCIÓN.
(07/02/2019). Solicitante/s: BECERRIL HERNÁNDEZ, Germán. Inventor/es: BECERRIL HERNÁNDEZ,Germán.
La presente invención se refiere a un sistema y un método automatizados de construcción de paredes, pisos y techos. El sistema comprende al menos un brazo robótico programable; al menos una herramienta acoplable al brazo robótico, en donde la herramienta se selecciona de una herramienta o dispositivo de soldado, de una herramienta o dispositivo de sujeción y carga, de una herramienta o sistema de sellado y/o pegado, y/o de combinaciones de éstas; y una pluralidad de materiales de construcción dispuestos en una posición predeterminada para que el brazo robótico identifique su disposición y pueda cogerlos; en donde los materiales de construcción se seleccionan de largueros de interconexión para piso, muro o techo y de elementos para piso, muro o techo, los cuales pueden ser sujetados por dicha al menos una herramienta y transportados e instalados por dicho al menos un brazo robótico.
(28/01/2019). Solicitante/s: Rattunde AG. Inventor/es: RATTUNDE,ULRICH.
Pinza doble para la sujeción de dos secciones de perfil redondo al mismo tiempo, con un primer alojamiento con un primer asiento (6a) y un primer asiento (6b) adicional y con un segundo alojamiento con un segundo asiento (7a) y un segundo asiento (7b) adicional, estando el primer y el segundo asiento (6a, 7a) conectados entre sí fijos en términos de posición y el primer y el segundo asiento (6b, 7b) adicionales conectados elásticamente entre sí y los dos asientos (6a, 7a) son desplazables en un sentido de desplazamiento (V) ida y vuelta contra los dos asientos (6b, 7b) adicionales, caracterizada porque los dos asientos (6b, 7b) adicionales están formados de una mordaza de una pieza y porque una sección elástica (5b) estrecha que conforma la fuerza elástica está conformada entre dos secciones de mordaza (5a, 5c) que presentan los asientos adicionales (6b, 7b).
PDF original: ES-2697750_T3.pdf
Pinza y procedimiento para agarrar los extremos de alambres y soldadora de hilo y robot con dichas pinzas.
(07/12/2018) Pinza (G) para agarrar los extremos (D1) de alambres (D)
- con al menos un medio de conexión con el cual la pinza (G) se puede fijar en un brazo (A), en particular, de un robot (R) o de un dispositivo de manejo,
- con una primera mordaza de sujeción ,
- con una segunda mordaza de sujeción y
- con un primer accionamiento,
- en la que al menos la segunda mordaza de sujeción está acoplada al primer accionamiento y mediante el accionamiento con respecto a la primera mordaza de sujeción y el medio de conexión es desplazable entre al menos una primera posición y una segunda posición y
- en la que en la primera posición de la segunda mordaza ,…
Dispositivo de seguridad de mordazas de agarre con ranura y lengüeta para una colaboración hombre-robot.
(27/11/2018). Solicitante/s: KUKA SYSTEMS GMBH. Inventor/es: STOCKSCHLÄDER,JULIAN, BOZADA,ZAFER, MARIS,TUNCAY.
Dispositivo de agarre , en particular como efector para un robot industrial, dispositivo de agarre que comprende: primeras y segundas mordazas de sujeción, que están orientadas de manera que pueden acercarse unas a otras para agarrar una pieza de trabajo, presentando la primera mordaza de sujeción un saliente de lengüeta en el lado que indica hacia la segunda mordaza de sujeción y la segunda mordaza de sujeción presenta en el lado que indica hacia la primera mordaza de sujeción una ranura correspondiente que aloja al menos parcialmente el saliente de lengüeta en el estado de las mordazas de sujeción aproximadas las unas hacia las otras, en donde en el estado separado de las mordazas de sujeción el espacio entre ambas mordazas de sujeción está ocupado al menos parcialmente por el saliente de lengüeta , para impedir una introducción involuntaria de objetos o de partes del cuerpo en el espacio ocupado.
PDF original: ES-2691374_T3.pdf
Accionamiento de una mano destinada a equipar un robot de carácter humanoide.
(16/10/2018) Mano destinada a equipar un robot de carácter humanoide, comprendiendo la mano una palma y varios dedos , pudiendo cada uno de los dedos ser desplazado con respecto a la palma entre una posición de reposo retenida por efecto de muelle y una posición comprimida obtenida por arrastre de una pieza de conexión entre dicho dedo y la palma , contrarrestando el efecto de muelle, comprendiendo la mano, además, un árbol motorizado , conectado a la pieza de conexión de cada uno de los dedos y configurado de modo que desplace de la posición de reposo, donde los dedos representan con la palma una mano abierta,…
(16/10/2018) Garra para levantar y bajar cargas, con la siguiente configuración:
- ésta comprende una pieza de acoplamiento que sirve para acoplar a una carga y una pieza de conexión que sirve para conectar con un elemento de tope,
- la pieza de conexión es guiada de forma móvil en la pieza de acoplamiento a lo largo de un eje de movimiento entre una primera posición final (E1) y una segunda posición final (E2), estando en la primera posición final los extremos de dichas piezas enfrentados mutuamente más separados que en la segunda posición final,
- en la pieza de acoplamiento están presentes al menos dos elementos de pestillo…
SISTEMA Y PROCEDIMIENTO PARA EL DESTROQUELADO DE PIEZAS FABRICADAS POR UN TROQUEL.
(16/10/2018). Solicitante/s: Ledisson A&IT S.L. Inventor/es: ESCARIZ DIAZ,Alejandro, MARTÍNEZ BARGIELA,Bruno, FERNÁNDEZ GONZÁLEZ,Carmen, MUIÑOS DOMÍNGUEZ,Óscar, GIL GIL,Sergio.
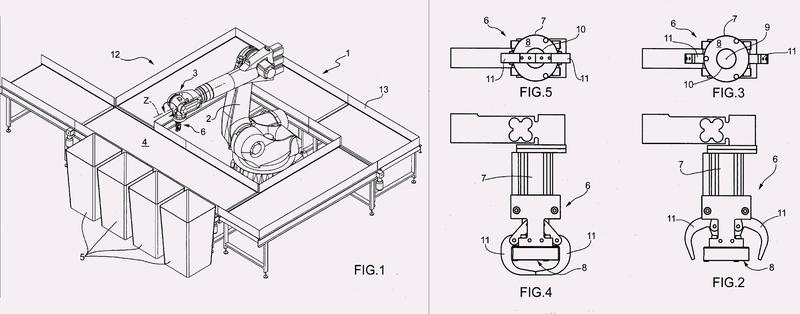
Sistema y procedimiento para el destroquelado de piezas fabricadas por un troquel, que comprende unos medios de control y una garra solidaria a unos medios de posicionamiento que comprende una pluralidad de pinzas de agujas neumáticas, donde cada pinza está configurada para extraer, una vez activada, al menos una aguja neumática de la base de la pinza para producir el agarre de piezas troqueladas, y donde los medios de control están configurados para, cuando la garra se encuentra en posición de recogida de piezas, activar una o varias pinzas determinadas en función del troquel empleado y de la disposición de las pinzas en la garra, para destroquelar al menos una pieza generada por el troquel.
PDF original: ES-2686149_A1.pdf
Accionamiento de una mano destinada a equipar un robot de carácter humanoide.
(15/10/2018) Mano destinada a equipar un robot de carácter humanoide, comprendiendo la mano una palma y varios dedos motorizados con respecto a la palma , un accionador común a varios dedos y un distribuidor que permite repartir un esfuerzo (F5) ejercido por el accionador hacia los dedos ,
caracterizada porque se define en un plano denominado plano frontal perpendicular a una dirección en la que está orientado el esfuerzo ejercido por el accionador , la proyección del punto de aplicación sobre el distribuidor del esfuerzo (F5) ejercido por el accionador y las proyecciones de los puntos de aplicación…
Procedimiento para eliminar adhesivo excedente.
(09/10/2018). Solicitante/s: EFTEC EUROPE HOLDING AG. Inventor/es: MULLER, MARTIN, STRAUSS,KURT, SCHWEINFURTH,MICHAEL, WANNER,REINER.
Procedimiento para eliminar el adhesivo excedente al unir dos piezas , en el que se aplica un adhesivo sobre una zona de unión de al menos una de las piezas (10, 12 y las piezas se unen por la zona de unión , donde el adhesivo excedente tras la unión se retira por medio de un dispositivo de aspiración ,
caracterizado porque
durante la aspiración, el dispositivo de aspiración se apoya con un elemento de guía al menos por zonas en una de las piezas.
PDF original: ES-2685484_T3.pdf
Máquina y método para embalar artículos en cajas de cartón.
(02/05/2018) Máquina para embalar artículos (A) en cajas de cartón en depósitos o cajas, con una sección de carga que comprende:
- un área de entrada de artículos , colocada para suministrar artículos dispuestos en una fila o en dos filas paralelas, con colocación de los artículos en dicha área de entrada sustancialmente según una agrupación de línea 1xN o una agrupación de dos líneas 2xN durante el uso, donde N es el número de artículos por fila;
- un área para cargar artículos en dichos depósitos;
- un dispositivo de configuración ;
- al menos un primer robot o manipulador colocado para cargar artículos desde dicha área de…
Mano destinada a equipar un robot de carácter humanoide con dedos mejorados.
(11/04/2018) Mano destinada a equipar un robot humanoide, comprendiendo la mano una palma y al menos un dedo articulado en la palma, comprendiendo el dedo al menos una falange y una articulación que conecta la falange a la palma , extendiéndose la falange según una dirección principal , comprendiendo dicha articulación una pieza de unión elástica que permite varios grados de libertad, comprendiendo dicha mano unos medios de motorización de un grado de libertad en rotación de entre los grados de libertad hechos posibles por la pieza de unión , permitiendo el grado de libertad en rotación motorizado un movimiento relativo alrededor de un eje perpendicular a la dirección principal de la falange , no estando los otros grados de…
MANIPULADOR ROBOTICO CONFIGURABLE ACCIONADO POR MEDIO DE ACTUADORES Y TENDONES.
(29/03/2018). Solicitante/s: UNIVERSIDAD NACIONAL AUTONOMA DE MEXICO. Inventor/es: ORTEGA CARRILLO,Hernando, GUTIÉRREZ PADRÓN,Adrián.
La presente invención está relacionada con una mano robótica con comportamiento ambidiestro que comprende por lo menos un actuador para proporcionar la fuerza necesaria para dar movimiento a por lo menos una extremidad o dedo que se encuentra sujeto a extremo superior de dicho actuador a través de un soporte móvil giratorio; y dicho actuador incluye en su extremo inferior una base que es la encargada de mantenerlo fijo a otras partes de la mano robótica, donde dicha base constituye el punto de referencia estático sobre el que cambia de posición el dedo a mover; y, un sistema de transmisión que permite transmitir la fuerza proporcionada por el actuador hacia el dedo para que éste pueda moverse.
Equipo de montaje y célula de montaje.
(07/03/2018). Solicitante/s: KUKA SYSTEMS GMBH. Inventor/es: ZUNKE,RICHARD DR, MÄNNICH,CARSTEN, JAKOB,MARIUS, PRUES,SEBASTIAN.
Equipo de montaje para el montaje de cojinetes , en particular rodamientos, en una pieza de trabajo , caracterizado porque el equipo de montaje presenta un robot táctil con una herramienta de agarre controlable y un equipo auxiliar controlable y accionado que puede interaccionar con el robot táctil para unir el cojinete a la pieza de trabajo.
PDF original: ES-2669218_T3.pdf
Sistema y método para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica.
(03/01/2018) Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado de detección con respecto a una estructura de sujeción para contener uno o más recipientes de muestras , que comprende:
(a) un sistema automatizado de detección para procesar recipientes de muestras, teniendo dicho sistema automatizado de detección una carcasa que alberga una cámara interior ;
(b) una estructura de sujeción dentro de dicha cámara interior, teniendo dicha estructura de sujeción uno o más pozos de contención para contener recipientes de muestras individuales, en la que dicha estructura de sujeción…
Control de dispositivo de extremidad.
(03/01/2018) Unidad de control para controlar eléctricamente un dispositivo de extremidad eléctricamente controlable en forma de una extremidad artificial para un ser humano o una extremidad de robot, comprendiendo el dispositivo de extremidad una pluralidad de accionadores, comprendiendo la unidad de control una primera interfaz para conectar la unidad de control al dispositivo de extremidad, comprendiendo la unidad de control una segunda interfaz para conectar la unidad de control a un dispositivo de recopilación de datos que comprende uno o más dispositivos de detección, comprendiendo la unidad de control una unidad de procesamiento que está dispuesta para controlar el dispositivo de extremidad basándose al menos en datos recopilados por…
Dispositivo para recorrer un objeto.
(06/09/2017) Un dispositivo para permitir que se lleve a cabo el trabajo en o alrededor de un objeto , incluyendo el dispositivo:
una primera disposición de agarre que está acoplada de forma pivotable o giratoria a una segunda disposición de agarre por medio de un brazo , comprendiendo la primera y segunda disposiciones de agarre cada una un par de patas (20a, 20b) de enganche conectadas de forma pivotable a un cuerpo y medios (24, 24b) de desplazamiento de pata de enganche respectivos montados en las patas (20a, 20b) de enganche, siendo asignable cada medio (24a, 24b) de desplazamiento de pata de enganche para mover la correspondiente pata (20a, 20b) de enganche entre una posición cerrada y una posición abierta para asegurar de forma respectiva la disposición de agarre y liberar la disposición de agarre del objeto ; y
un controlador…
Herramienta para asentar tapones.
(05/04/2017). Solicitante/s: KUKA SYSTEMS GMBH. Inventor/es: MAYR,STEFAN, KARA,YÜCEL, STOCKSCHLÄDER,JULIAN, ZUNKE,RICHARD DR.
Herramienta guiada por robot para asentar automáticamente unos tapones en unas piezas de trabajo , en particular en piezas de una carrocería, en donde la herramienta para asentar tapones presenta un armazón con una conexión para un robot industrial , un depósito de tapones y una unidad de asiento con un alojamiento de tapones y un equipo de giro para desplazar el alojamiento de tapones entre una posición de carga sobre el depósito de tapones y una posición de asiento , caracterizada porque el alojamiento de tapones presenta una o varias cabezas de alojamiento conectadas al equipo de giro en cada caso con un empujador de asiento y un porta-tapones para alojar un tapón individual , en donde el empujador de asiento está apoyado en su dirección axial fijado al armazón y el porta-tapones está montado de forma que puede desviarse axialmente con relación al empujador de asiento.
PDF original: ES-2672242_T3.pdf
Procedimiento e instalación de prensión automática de un objeto.
(01/03/2017) Procedimiento de prensión automática, por un sistema poli articulado sometido a un sistema de visión , de un objeto situado en una zona capaz de recibir por lo menos un objeto , dicho sistema poli articulado comprendiendo por lo menos dos órganos de prensión de tipos diferentes, cada uno capaz de coger un objeto mediante por lo menos una zona de toma específica de dicho objeto caracterizado por que comprende por lo menos las etapas que consisten en:
- capturar una imagen de la zona de recepción por medio del sistema de visión ;
- tratar la información resultante de la imagen e identificar todas las zonas específicas…
Sistema para manipular piezas en una línea de prensas.
(04/01/2017). Solicitante/s: ABB SCHWEIZ AG. Inventor/es: CASANELLES MOIX,RAMON, RUIZ GONZÁLEZ,JOSÉ.
Un sistema para manipular piezas en una línea de prensas, que comprende
- al menos dos robots industriales , cada uno con una muñeca y un brazo auxiliar conectado a la muñeca por primeros medios giratorios respectivos, y
- una unidad de control para el control conjunto de dichos robots,
comprendiendo el sistema además
- una barra transversal conectada en un extremo de la misma al brazo auxiliar de un robot, y en otro extremo de la misma al brazo auxiliar de otro robot, por segundos medios giratorios respectivos,
- comprendiendo la barra transversal al menos dos porciones de barra transversal (5a,5b), cada una unida al brazo auxiliar de un robot y cada una dispuesta para llevar medios de pinza para coger piezas, y
- estando unidas las porciones de barra transversal entre sí a través de una disposición de desplazamiento de manera que son desplazables una con respecto a otra en su dirección longitudinal.
PDF original: ES-2621498_T3.pdf
Dispositivo y procedimiento para fabricar componentes reforzados con fibras.
(16/11/2016). Solicitante/s: Broetje-Automation GmbH. Inventor/es: REINHOLD,RAPHAEL, JÜRGENS,STEFAN.
Dispositivo para uso en la fabricación de componentes reforzados con fibras, que comprende un bastidor de base posicionable , estando previsto en el bastidor de base un equipo de retención controlable para apresar y retener al menos una capa de fibras de refuerzo , estando previsto en el bastidor de base un equipo de drapeado con el cual se puede drapear la capa de fibras de refuerzo contra un macho de moldeo mediante la aplicación de un vacío y comprendiendo el equipo de drapeado una capa de drapeado extensible , caracterizado por que la capa de drapeado puede ser trasladada entre una posición de reposo y una posición de trabajo dispuesta en el lado inferior del bastidor de base.
PDF original: ES-2662925_T3.pdf
Método para desacoplar el imán de sujeción de un elemento de pared lateral desmontable mediante un robot lateral, y sistema con un robot lateral y una unidad de pared lateral desmontable.
(19/10/2016). Solicitante/s: Elematic Oyj. Inventor/es: KORKIAMÄKI,PEKKA.
Método para desacoplar un imán de sujeción de una unidad de pared lateral desmontable de un lecho de colada mediante un robot lateral, comprendiendo la unidad de pared lateral un imán de sujeción y una estructura que rodea el imán de sujeción, método en el cual se agarran los medios de funcionamiento de imán que se extienden desde la superficie superior de la estructura que rodea el imán de sujeción mediante los medios (3, 4; 3', 4') de agarre de la unidad (2; 2') de agarre, caracterizado porque en el método, la unidad (2; 2') de agarre del robot lateral se soporta contra la estructura que rodea el imán de sujeción, tras lo cual los medios (3, 4; 3', 4') de agarre de la unidad de agarre se mueven en relación con la unidad de agarre con el fin de desacoplar el imán de sujeción del lecho de colada.
PDF original: ES-2611171_T3.pdf
Cabezal de herramienta para realizar operaciones industriales que tiene un sistema de monitoreo inalámbrico.
(10/08/2016) Un sistema de realización de operaciones industriales, que comprende:
- al menos un cabezal (H) de herramienta provisto de una herramienta ;
- al menos un sensor (S) asociado a dicho cabezal (H) de herramienta y configurado para detectar un parámetro operativo del cabezal (H) de herramienta;
- una unidad (M) de control para controlar la operación de dicho cabezal (H) de herramienta,
- un módulo (E) de control montado sobre dicho cabezal (H) de herramienta y que incluye:
- una unidad (A) de adquisición de datos conectada a dicho al menos un sensor (S) y configurada para adquirir datos procedentes de al menos un sensor (S); y
- una unidad (T) de transmisión inalámbrica conectada…
Cuchilla de fresa y sistema de desbarbado.
(11/05/2016) Una cuchilla de fresa para un aparato de desbarbado para cortar las rebabas de una pieza que tiene
una parte (10A, 30A, 40A, 50A, 60A, 70A) de filo de corte que corresponde a la raíz de las rebabas;
y una parte (10B, 30B, 40B, 508, 60B, 70B) de copia que corresponde a una parte de cara de la pieza y no constituye un filo de corte,
en el que la posición de la punta del filo (10A1, 30A1) de corte de la parte de filo de corte se localiza en la misma posición que una cara de copia que constituye la parte de copia o se localiza para estar más lejos de la pieza que la cara de copia; y
en el que una parte (10A2, 30A2, 70B1, 70B2, 70B3) de suavizado para suavizar una parte desbarbada por la parte de…
Máquina para la recogida selectiva automatizada.
(04/01/2016). Ver ilustración. Solicitante/s: Claudio Ricci S.r.l. Inventor/es: RICCI,FABIO.
Máquina para la recogida selectiva automatizada de artículos individuales que comprende un brazo de manipulación móvil , un cabezal de elección y colocación fijado a un extremo libre de dicho brazo de manipulación móvil , medios de identificación para el artículo que va a elegirse o ya elegido, una unidad de control adecuada para el control y la manipulación de dichos medios de funcionamiento de máquina y partes móviles y un conjunto de agarre (b) alojado en dicho cabezal de elección y colocación y caracterizada por que dicho conjunto de agarre comprende:
- un dispositivo neumático que tiene una superficie de captación con una abertura central a través de la que se crea un vacío, y una abertura anular que está diseñada para rodear dicha abertura central y a través de la cual se crea una sobrepresión; y
- un dispositivo de pinza dispuesto de tal manera que se cierra por debajo de dicha superficie de captación.
PDF original: ES-2555550_T3.pdf
{kind=link}
{kind=link}