CIP-2021 : B25J 19/00 : Accesorios adaptados a los manipuladores, p. ej. para controlar,
para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
CIP-2021 › B › B25 › B25J › B25J 19/00[m] › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
Notas[t] desde B21 hasta B32: CONFORMACION
B25J 19/02 · Dispositivos sensibles.
B25J 19/04 · · para la visión.
B25J 19/06 · Dispositivos de seguridad.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA ROBÓTICO QUIRÚRGICO Y MÉTODO PARA MANEJAR UN SISTEMA ROBÓTICO QUIRÚRGICO.
(28/12/2017) Un sistema robótico quirúrgico que comprende: unidades robóticas, cada una de las cuales es independiente de las demás y comprende un soporte y un conjunto de brazo robótico ; dicho soporte comprende medios de movimiento y está configurado para cambiar la posición y la orientación del soporte con respecto a la mesa ; dicho conjunto de brazo robótico comprende: un brazo robótico , una herramienta quirúrgica acoplada a este y un sensor de fuerza configurado para recibir la medición de las fuerzas y de los pares aplicados por la herramienta . El sistema comprende también una consola de control configurada para manejar a distancia dichas unidades robóticas, que comprende: un medio de computación ; dispositivos…
(15/11/2017). Solicitante/s: Airbus Defence and Space GmbH. Inventor/es: HOFFMANN, GERHARD.
Guía de cables con un árbol articulado , que presenta una primera cabeza de árbol articulado en un extremo de una sección de árbol , que en dirección longitudinal de la guía de cables es la anterior, y una segunda cabeza de árbol articulado en el extremo de la sección de árbol , que en dirección longitudinal de la guía de cables es el posterior, con un dispositivo parta la fijación de un arnés de cables en la segunda cabeza de árbol articulado y con un cojinete articulado dispuesto de forma fija a distancia a lo largo del arnés de cables en dirección longitudinal de la guía de cables , detrás de la segunda cabeza de árbol articulado y configurado para pasar el arnés de cables.
PDF original: ES-2656616_T3.pdf
Dispositivo para guiar al menos una línea o conducto de un robot de brazo articulado así como robot de brazo articulado.
(27/09/2017). Solicitante/s: LEONI Kabel GmbH. Inventor/es: BURLOT,CLAUDE.
Dispositivo para guiar al menos una línea o tubería de un robot de brazo articulado, que tiene un mecanismo de retorno alojado en una carcasa para ejercer una fuerza elástica de retorno sobre la línea y un elemento de fijación para fijar la línea, en el que la carcasa tiene dos aberturas opuestas en forma de ranura que se extienden en la dirección longitudinal , y donde el elemento de fijación comprende una abrazadera o brida con dos brazos opuestos , que están conectados a un elemento deslizante o desplazador del mecanismo de retorno en la carcasa a través de las dos aberturas.
PDF original: ES-2651104_T3.pdf
Dispositivo para recorrer un objeto.
(06/09/2017) Un dispositivo para permitir que se lleve a cabo el trabajo en o alrededor de un objeto , incluyendo el dispositivo:
una primera disposición de agarre que está acoplada de forma pivotable o giratoria a una segunda disposición de agarre por medio de un brazo , comprendiendo la primera y segunda disposiciones de agarre cada una un par de patas (20a, 20b) de enganche conectadas de forma pivotable a un cuerpo y medios (24, 24b) de desplazamiento de pata de enganche respectivos montados en las patas (20a, 20b) de enganche, siendo asignable cada medio (24a, 24b) de desplazamiento de pata de enganche para mover la correspondiente pata (20a, 20b) de enganche entre una posición cerrada y una posición abierta para asegurar de forma respectiva la disposición de agarre y liberar la disposición de agarre del objeto ; y
un controlador…
Estructura tolerante a los choques.
(02/08/2017) Una estructura de elemento de montaje para aumentar la tolerancia a los choques en un robot que comprende un elemento de herramienta de robot, caracterizada porque la estructura de elemento de montaje, que está configurada para montarse dentro de la misma unidad controlable que el elemento de herramienta de robot, comprende
- una primera superficie y
- una segunda superficie hacia el elemento de herramienta del robot,
- y porque dichas primera y segunda superficies están configuradas para conectarse con un conjunto de cuerdas que comprende una pluralidad de cuerdas (203a, 203b) que constituyen límites rígidos para distancias entre puntos de conexión en la primera superficie y la segunda superficie
en la que el conjunto de cuerda tiene una geometría que se mantiene sustancialmente rígida…
Procedimiento de protección y dispositivo de protección para un aparato de manipulación.
(10/05/2017). Solicitante/s: Blue Danube Robotics GmbH. Inventor/es: ZILLICH,MICHAEL.
Procedimiento para proteger personas y obstáculos estacionarios o movidos de manera autónoma, que se encuentran delante de unos aparatos de manipulación estacionarios o movidos de forma autónoma, tales como robots de fabricación, transporte, inspección o servicio y sus manipuladores, frente a colisiones en la zona de trabajo de estos aparatos de manipulación por medio de unos elementos de protección configurados como envolturas de protección y rellenables con un medio y con uno o varios sensores de presión interiores, caracterizado por que el medio no es suministrado a presión desde fuera a cada elemento de protección individual , sino que una sobrepresión es generada en el interior del elemento de protección, y además de uno o varios sensores de presión , también presenta un dispositivo de aumento de presión interior.
PDF original: ES-2672385_T3.pdf
Dispositivo de posicionamiento previo y de fijación amovible de miembros articulados de un robot humanoide.
(12/04/2017). Solicitante/s: Softbank Robotics Europe. Inventor/es: CLERC,VINCENT, HOUCHU,LUDOVIC, MUGNIER,FABIEN.
Robot móvil que comprende un tronco y varios miembros conectados al tronco de manera amovible, caracterizado porque comprende:
* para cada uno de los miembros , unos medios para posicionar previamente dicho miembro en el tronco , y
* una única brida conectada al tronco y configurada para fijar de manera amovible el conjunto de los miembros al tronco
* y porque cada uno de los miembros comprende una articulación motorizada, por medio de la cual dicho miembro se posiciona y se fija al tronco y, puede accionarse en movimiento con respecto al tronco.
PDF original: ES-2672579_T3.pdf
Máquina de rayos láser para el procesamiento térmico de piezas de trabajo con un sistema de guía de cable que presenta una unidad de desviación montada.
(19/10/2016) Máquina de rayos láser que comprende
• un cabezal láser para emitir un rayo láser sobre una pieza de trabajo que se ha de procesar,
• una unidad de movimiento para el movimiento tridimensional del cabezal láser , que presenta un pórtico de máquina que se puede mover en dirección lineal, en el que está sujeto un carro transversal que se puede desplazar transversalmente y en el que está montado el cabezal laser ,
• un cable de fibra flexible con un radio de curvatura mínimo admisible, que transmite el rayo láser al cabezal láser y que entra en un punto de entrada situado en el extremo superior del cabezal láser, y
• un sistema de guía de cable …
Robot programable e interfaz de usuario.
(11/05/2016) Un sistema del robot programable que comprende:
(a) un robot que comprende varias secciones del brazo individuales, donde las secciones adyacentes están interconectadas mediante una articulación;
(b) medio de accionamiento controlable proporcionado en al menos alguna de dichas articulaciones, que acciona dichas articulaciones;
(c) un sistema de control para controlar dicho medio de accionamiento,
(d) medio de la interfaz de usuario que comprende medios para programar el sistema del robot, siendo dichos medios proporcionados externamente al robot, como un mando a distancia; y
(e) medios de almacenamiento que cooperan…
Dispositivo para guiar un conducto.
(14/01/2016) Un dispositivo para guiar un conducto con un dispositivo de guiado , en el que un primer segmento del conducto está guiado linealmente de manera desplazable en su dirección longitudinal contra la fuerza elástica de un dispositivo de retorno , conectándose al primer segmento un segundo segmento curvado del conducto , conformando una reserva de longitud y presentando el dispositivo de retorno al menos un muelle de tracción conformado como muelle helicoidal dispuesto junto al primer segmento del conducto , que con un primer extremo está conectado al primer segmento del conducto y con un segundo extremo está conectado de manera fija al dispositivo de guiado , caracterizado porque en al menos un muelle helicoidal en al menos uno…
Un manipulador neumático equilibrado.
(04/01/2016) Un manipulador neumático equilibrado, que incluye:
- un dispositivo de soporte que incluye un grupo giratorio alrededor de un eje vertical (z);
- un mecanismo de paralelogramo articulado que incluye un brazo oscilante montado a pivote en el grupo para girar alrededor de un eje de oscilación horizontal (x);
- al menos un accionador lineal neumático , que actúa entre el grupo giratorio y el mecanismo de paralelogramo articulado , para hacer que el brazo gire alrededor del eje de oscilación (x);
caracterizado porque el manipulador además comprende:
- una corredera conectada al accionador y montada de manera deslizable en el grupo giratorio por medio de primeros medios de guía rectilíneos extendidos en una primera dirección dada (c);
- segundos medios de guía rectilíneos…
DISPOSITIVO EXOESQUELETICO DE REHABILITACION PARA LOS DEDOS DE LA MANO.
(26/11/2015). Ver ilustración. Solicitante/s: UNIVERSIDAD MILITAR NUEVA GRANADA. Inventor/es: AVILÉS SANCHEZ,Oscar Fernando, RAMÍREZ GUIO,Hoffman Fernando, CÁCERES FAJARDO,Cesar Augusto, GÓMEZ DÍAZ,María Fernanda.
La presente invención se refiere a un dispositivo exoesquelético diseñado para ejecutar una terapia de flexión y extensión con fines de rehabilitación del dedo índice en personas que sufran problemas de movilidad en los tendones de los dedos. El campo de aplicación de la presente invención corresponde a dispositivos biomecatrónicos para la rehabilitación de los dedos de las manos, específicamente el dispositivo se desarrollo para ser implementado en terapias que comprenden ejercicios deflexión y extensión del dedo. En la presente invención se ha diseñado un dispositivo biomecatrónico que permita comprender y controlar cada uno de los subsistemas que componen dicho dispositivo, como lo son el sistema mecánico, electrónico y biomecánico de la mano.
Robot industrial de múltiples ejes con herramienta integrada.
(22/07/2015) Robot industrial de múltiples ejes, que comprende:
- una estructura de base,
- una muñeca de robot articulada, y
- una cadena de elementos de robot mutuamente articulados que conectan dicha estructura de base a dicha muñeca de robot,
- en el que dicha muñeca de robot termina con una brida (F) a la que está conectado rígidamente un cabezal de soldadura eléctrica por puntos que requiere una suministro de energía y/o un suministro de fluido,
- en el que el cabezal de soldadura comprende una estructura de soporte rígidamente conectada a la muñeca de robot, y un par de electrodos de soldadura soportados por los brazos portaelectrodos respectivos, en el que al menos uno de dichos…
Camisa de guía de hilo de soldadura con una serie de cuerpos de guía conectados cada uno a través de un anillo giratorio libremente y de una unión basculante.
(06/05/2015) Camisa de guía de hilo de soldadura que tiene una serie de cuerpos de guía conectados entre sí, conteniendo cada uno de los cuerpos de guía una serie de elementos de rodamiento que definen un canal de guía para el hilo de soldadura , y caracterizado por que cada cuerpo de guía tiene un anillo que es coaxial con el canal de guía y es giratorio libremente en una dirección periférica en el cuerpo de guía , estando conectado el anillo al cuerpo de guía adyacente por medio de una unión basculante que permite que el cuerpo de guía adyacente bascule alrededor de un eje basculante con respecto al cuerpo de guía dotado del anillo .
Sistema de manipulador de robot.
(04/03/2015) Sistema de manipulador de robot , que comprende
• un manipulador de robot con una cadena cinemática de segmentos rígidos de manipulador de robot , que están enlazados juntos por juntas articuladas ,
• un controlador de robot para controlar la ejecución de un programa de robot,
• al menos un sensor de temperatura para proporcionar valores medidos de la temperatura,
caracterizado porque
al menos dos cubiertas calefactables están fijadas sobre la superficie de al menos un segmento de manipulador que representa o que cubre al menos áreas críticas de la temperatura del robot para aplicar energía térmica encima, mientras que la cantidad pertinente de energía térmica es controlada…
Sistema de transmisión flexible de agua para robots.
(04/12/2014) La invención se refiere a un nuevo sistema para la alimentación de la boquilla de corte, prevista en los robots de los especialmente diseñados para el corte de materiales por chorro de agua a presión, que sustituye los sistemas de transmisión de agua a base de serpentines metálicos por medios flexibles, ya que los mismos o bien se agrietan, o bien se rompen, ya que de ser diseñados más flexibles no tendrían la resistencia adecuada a las solicitaciones generadas por llamados grados de libertad del robot, y la presión del líquido que circulan por su interior.
Una brida portaherramienta para un robot industrial.
(26/11/2014) Una brida portaherramienta adaptada para disponerse en un brazo de un robot industrial a fin de conectar una herramienta a dicho brazo , en donde dicha brida portaherramienta comprende:
- un cuerpo que tiene una superficie primaria adaptada para conectarse a dicha herramienta y
- un saliente que se proyecta desde dicha superficie primaria y está concebido para acoplarse con un rebajo dispuesto en dicha herramienta a fin de proporcionar una alineación rotacional entre dicha herramienta y dicha brida portaherramienta ,
- estando dicha brida portaherramienta provista de un agujero pasante que se extiende a través de dicho saliente y dicho cuerpo , pudiendo conectarse…
Dispositivo para la alimentación automatizada de elementos de unión a una unidad de procesamiento así como manga de alimentación para los elementos de unión.
(05/11/2014) Dispositivo para la alimentación automatizada de elementos de unión a una unidad de procesamiento, en particular un robot industrial de varios ejes, que comprende una manga de alimentación flexible para alimentar los elementos de unión a la unidad de procesamiento, caracterizado por el hecho que el dispositivo comprende un paquete de mangas para la alimentación de la unidad de procesamiento con medios de explotación, en el que el paquete de mangas presenta una envolvente de protección en la que están guiados una pluralidad de conductos de alimentación, en la que la manga de alimentación flexible está contenida en el paquete de mangas y comprende una manga interna incorporada en una envolvente de manga hecha de una materia plástica elástica, en donde dicha manga interna presenta una sección transversal…
Pieza de robot y método para proteger una pieza de robot.
(06/08/2014) Estructura de absorción de choques para una pieza de un robot industrial caracterizada por que la estructura de absorción de choques incluye una cubierta dispuesta para rodear la pieza de robot y al menos dos elementos de separación sobre los que está montada la cubierta de tal manera que un espacio intermedio está formado entre la cubierta y la pieza de robot , y porque al menos uno de los elementos de separación soporta elásticamente la cubierta .
Dispositivo para guiar un tubo flexible.
(18/06/2014) Dispositivo para guiar un tubo flexible , que presenta varias líneas de alimentación , de un robot industrial con un elemento de guía , en el que el tubo flexible está guiado de manera móvil en contra de la fuerza de retroceso de un elemento de retroceso , presentando el elemento de guía una sección de guía axial (11A), configurada como sección de tubo redondo, para guiar el tubo flexible en su dirección longitudinal, así como una sección de compensación (11B) situada a continuación de la sección de guía (11A), así como formada por una carcasa y configurada de tal modo que en la carcasa es posible una desviación lateral de la línea de alimentación , con respecto a la dirección longitudinal, más allá de un tramo axial, caracterizado por que
- la carcasa presenta una geometría esencialmente rectangular o…
Sistema y método de control de calidad para piezas fabricadas.
(23/04/2014) Sistema de producción de piezas fabricadas que comprende un proceso de producción que tiene al menos un robot industrial equipado con una herramienta de manipulación para recoger una pieza fabricada , caracterizado por que el robot está dispuesto en una célula de control de calidad y por que el robot está programado para mantener la pieza fabricada en al menos una posición conocida en la célula de control de calidad, para orientar la pieza fabricada en una orientación conocida en el espacio tridimensional con respecto a la posición conocida y para presentar la pieza para un control de calidad.
(11/12/2013) Dispositivo de pintura para pintar unos componentes , en particular para pintar carrocerías de automóvileso partes de las mismas, con
a) un robot de pintura de varios ejes , que posiciona un pulverizador,
b) un control de robot para controlar el robot de pintura , y
c) un armario de control , que contiene el control de robot ,
d) una tecnología de aplicación con componentes para medios de revestimiento utilizados con frecuencia ycomponentes para medios de revestimiento utilizados con poca frecuencia,
en el que
e) el armario de control forma una columna de soporte, que soporta mecánicamente el robot de pintura ,
f) los componentes de la tecnología…
(14/08/2013) Un dispositivo de rotación que tiene un actuador tubular que se infla en una dirección de diámetro demanera que una longitud total se acorta mediante el suministro con fluido; un miembro de enclavamiento sobreel cual se dispone el actuador y al cual se fija un lado de parte extrema (14b) del actuador , un miembrorotatorio , acoplado, con posibilidad de giro, al miembro de enclavamiento en el otro lado de parte extrema(14a) del actuador ; y un material de alambre para conectar la otra parte extrema (14a) del actuador con el miembro rotatorio ; en donde el miembro de enclavamiento esta provisto…
Dispositivo que comprende una cámara de aire acondicionado con un robot.
(05/04/2013) Dispositivo , que comprende un armario de aire acondicionado con un espacio interior delimitadopor un fondo aislante , cuya temperatura es regulable por medio de un primer equipo, y una instalación demanipulación dispuesta en el espacio interior, cuya temperatura puede ser regulada por medio de un segundoequipo, caracterizado porque el dispositivo comprende un bastidor de transporte que recibe tanto el armariode aire acondicionado como también el primero y el segundo equipo, con respecto a cuyo bastidor esdesplazable un chasis que recibe la instalación de manipulación y que está desacoplado del bastidordurante la utilización del armario de aire acondicionado y está conectado con el bastidor para la formación de unaunidad…
Dispositvo de protección contra colisiones.
(25/03/2013) Dispositivo de protección contra colisiones para unir un soplete de soldadura unido mediante un paquete demangueras con un brazo de robot de un robot de soldadura, con dos elementos de acoplamiento que puedenunirse entre sí de modo liberable por medio de unos imanes , donde uno de los elementos de acoplamiento estárealizado para ser unido al soplete de soldadura o a un acoplamiento del soplete que puede unirse con el sopletede soldadura , y el otro elemento de acoplamiento está realizado para unirlo con el brazo del robot , presentandolos elementos de acoplamiento unos orificios , caracterizado porque los orificios en los elementosde acoplamiento están realizados para el paso del paquete de mangueras , comprendiendo el elemento deacoplamiento un acoplamiento del soplete…
Equipo de elevación para la manipulación manual de cargas.
(22/03/2013) Equipo de elevación para la manipulación manual de una carga , que incluye al menos un brazomanipulador alojado de forma giratoria en una articulación giratoria asociada , con un eje de girovertical , y que presenta medios de sujeción para la carga , estando previsto un accionamientode apoyo que actúa sobre la articulación giratoria para girar el brazo manipulador yestando dispuesto, en la zona de los medios de sujeción para la carga , un dispositivo de control para un accionamiento de apoyo accionable por el usuario,
caracterizado porque el accionamiento de apoyo incluye un limitador de momentos en forma de unacoplamiento deslizante, y porque el acoplamiento deslizante está dimensionado de modo que su momentode transmisión puede ser superado…
(15/08/2012) Rótula que se coloca entre un dispositivo de trabajo y una sección de muñeca (w) que incluye una sección de eje giratorio hacia delante/en sentido contrario (w1) dispuesta en una sección del cuerpo de un robot industrial e incluye una vía de transmisión de fluido para la interconexión del lado de la sección de muñeca y el lado del dispositivo de trabajo, comprendiendo dicha rótula:
una pared fija fijada a la sección de muñeca (w) de manera que el par de la sección del eje (w1) no
se transmite;
una sección giratoria fijada a la sección del eje (w1) y que gira con el mismo;
y una pluralidad de tabiques montados en dicha sección giratoria de manera que el par de…
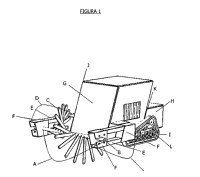
VEHICULO BARREMINAS TELEOPERADO MODULAR DESARMABLE Y TRANSPORABLE.
(02/08/2012). Ver ilustración. Solicitante/s: TECNOLOGIAS MARTES S.A.S. Inventor/es: BETANCUR,Javier.
El vehículo teleoperado barreminas modular desarmable y transportable es un vehículo que integra una herramienta de desminado tipo "flail" que incorpora cadenas y elementos de corte según las necesidades. Esta herramienta esta sostenida, por dos brazos blindados, de la estructura o chasis frontal, la cual contiene un motor de combustión suspendido sobre un mecanismo de cambio de nivel, que permite al vehículo alcanzar pendientes superiores a 45°. El chasis frontal se une mediante una lamina metálica a un chasis trasero que contiene los motores de tracción y las baterías, dejando un espacio entre ambos que permite una vía de salida a los gases de una posible detonación. A dicho chasis se conectan las orugas. El chasis frontal tiene un ángulo que permite la reflexión de la onda explosiva generada por las minas. Todos estos elementos están unidos de una forma modular que permite desarmar el vehículo en piezas que no superen los 40 Kg.
Pie para robot humanoide.
(01/08/2012) Pie para robot humanoide, que puede conectarse a una pierna mediante un tobillo que comprende:
· una suela ,
· dedos ,
· una unión motorizada, independiente del tobillo, en rotación entre la suela y los dedos ,pudiendo los dedos desplazarse según un recorrido angular alrededor de un eje de la unión ,
· un accionador que permite la motorización de la unión , caracterizado porque comprende,además, medios para controlar el accionador de manera autónoma que permiten elegir un estadoentre:
- una rigidez completa de la unión ,
- un par de retorno en función del recorrido angular de la unión ,
- una amortiguación de la rotación de la unión…
SISTEMA DE CAMBIO DE HERRAMIENTAS.
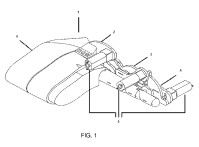
(14/03/2012) Sistema de cambio de herramientas para sistemas de transporte de piezas de trabajo en prensas, que comprende una traviesa (Q) y una herramienta (T), en el que la herramienta (T) está constituida por al menos un soporte de base de la herramienta y por brazos de herramienta y porque los brazos de herramienta se pueden sustituir individualmente, en el que el soporte de base de la herramienta está dispuesto de forma desmontable para un proceso de equipamiento en la traviesa (Q) desplazable, y después de un cambio de los brazos de herramienta , que se realiza cuando el soporte de base de la herramienta está desmontado, se puede fijar de nuevo en la traviesa (Q), en el que la conexión entre un brazo de la herramienta y el soporte de base de la herramienta se realiza por medio de una pieza de ajuste de acoplamiento , que se inserta de forma…
PROCEDIMIENTO Y DISPOSITIVO PARA LA CLIMATIZACION DE ROBOTS.
(16/06/2007) Procedimiento para la climatización de robots (R), en el que a) dentro de una primera envoltura , alrededor de cada robot (R) circula un medio fluido (M), b) el medio fluido (M) es conducido desde la primera envoltura a una segunda envoltura que la rodea, c) alrededor de la primera envoltura dentro de la segunda envoltura circula el medio fluido (M), d) el medio fluido (M) se evacua de la segunda envoltura , y e) el medio fluido (M) evacuado de la segunda envoltura se pone a una temperatura situada en el intervalo de la temperatura de funcionamiento del robot (R) que se ha de climatizar y, a continuación, se reconduce a la primera envoltura , caracterizado porque f) antes de entrar en la primera envoltura , el medio fluido (M) se pone, en un intercambiador térmico (W), a la temperatura situada en el intervalo de la temperatura de funcionamiento…
INTEGRACION DE UN LASER A UN BRAZO ROBOT.
(16/06/2007). Solicitante/s: ROBOT TECHNOLOGY GMBH. Inventor/es: MAIER, STEFAN, WECHS, THOMAS.
Robot con un primer , segundo y tercero eje de base, en el cual al menos el tercero es un eje de base rotatorio, y presenta un miembro de un brazo colocado verticalmente, y el robot presenta un láser que está colocado en una caja de láser , el miembro de brazo de robot que está accionado por una unidad de accionamiento del tercer eje de base , en lo esencial está formado por la caja de láser con un láser integrado, el rayo láser está girado siguiendo en un primer eje delantero , con un giro de espejo siguiendo un segundo eje delantero , con una óptica de tratamiento siguiente, la unidad de accionado del primer eje delantero está colocada después de la caja de láser.
{kind=link}
{kind=link}