Un manipulador neumático equilibrado.
Un manipulador neumático equilibrado, que incluye:
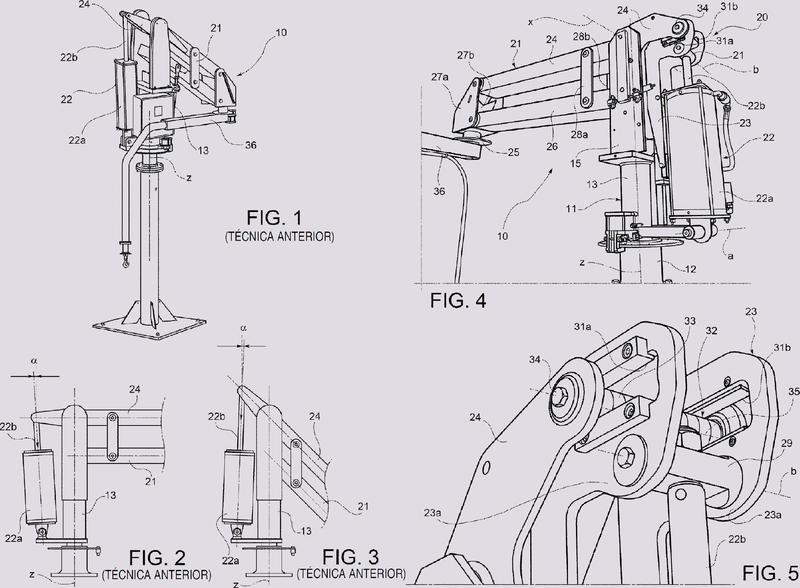
- un dispositivo de soporte (11) que incluye un grupo (13) giratorio alrededor de un eje vertical (z);
- un mecanismo de paralelogramo articulado (21) que incluye un brazo oscilante (24) montado a pivote en el grupo (13) para girar alrededor de un eje de oscilación horizontal (x);
- al menos un accionador lineal neumático (22), que actúa entre el grupo giratorio (13) y el mecanismo de paralelogramo articulado (21), para hacer que el brazo (24) gire alrededor del eje de oscilación (x);
caracterizado porque el manipulador además comprende:
- una corredera (23) conectada al accionador (22) y montada de manera deslizable en el grupo giratorio (13) por medio de primeros medios de guía rectilíneos (30) extendidos en una primera dirección dada (c);
- segundos medios de guía rectilíneos (31), integrales con la corredera (23) y que se extienden en una segunda dirección perpendicular a la primera dirección;
- un elemento de aplicación (32, 33), montado en el brazo oscilante (24), aplicándose el elemento (32, 33) a los segundos medios de guía (31).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/IB2013/053791.
Solicitante: DALMEC S.P.A.
Nacionalidad solicitante: Italia.
Dirección: Via Gramsci 2 38023 Cles (Trento) ITALIA.
Inventor/es: LORENGO,GIOVANNI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J13/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Controles para manipuladores (controles por programa B25J 9/16).
- B25J18/00 B25J […] › Brazos.
- B25J19/00 B25J […] › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
PDF original: ES-2555474_T3.pdf
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
Sistema de carga eléctrica para un robot, del 18 de Marzo de 2020, de Locus Robotics Corp: Un sistema de carga eléctrica, que comprende: un conjunto de cargador eléctrico, incluyendo: una base del cargador a acoplarse a una fuente de energía eléctrica; […]