Pie para robot humanoide.
Pie para robot humanoide, que puede conectarse a una pierna mediante un tobillo que comprende:
· una suela (11),
· dedos (12),
· una unión (13) motorizada, independiente del tobillo, en rotación entre la suela (11) y los dedos (12),pudiendo los dedos (12) desplazarse según un recorrido angular alrededor de un eje (14) de la unión (13),
· un accionador (19) que permite la motorización de la unión (13), caracterizado porque comprende,además, medios para controlar el accionador (19) de manera autónoma que permiten elegir un estadoentre:
- una rigidez completa de la unión (13),
- un par de retorno en función del recorrido angular de la unión (13),
- una amortiguación de la rotación de la unión (13),
- un aporte energético durante la rotación de la unión (13).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/056965.
Solicitante: Bia.
Nacionalidad solicitante: Francia.
Dirección: Z.A Les Boutriers 8 rue de l''HAUTIL 78700 Conflans Ste Honorine FRANCIA.
Inventor/es: ALFAYAD,Samer, BEN OUEZDOU,Fathi, NAMOUN,Fayçal.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J19/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
- B62D57/032 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 57/00 Vehículos caracterizados por medios de propulsión o de contacto con el suelo diferentes de ruedas y orugas, solos o complementando a las ruedas o a las orugas (trineos B62B; trineos de motor B62M). › con una base de sustentación y patas elevadas alternativamente o en un orden determinado; con pies o patines elevados alternativamente o en un orden determinado (B62D 57/024 tiene prioridad).
PDF original: ES-2391612_T3.pdf
Fragmento de la descripción:
Pie para robot humanoide
La invención se refiere a un pie y un robot humanoide que aplica el pie. La invención encuentra una utilidad particular en la realización de robots humanoides que se acercan en mayor medida a la morfología humana.
Un modelo matemático que modeliza esta morfología ha sido desarrollado en los años 1960 en los Estados Unidos por Aerospace Medical Research Laboratories situado en Dayton, Ohio. Este modelo, bien conocido bajo el nombre de modelo Hanavan, describe de manera paramétrica, con relaciones a una altura y una masa humanas dadas, las dimensiones de todas las partes del cuerpo. Por lo general, el pie es descrito como que comprende una suela y dedos unidos entre sí mediante una articulación con un grado de libertad en rotación en un plano sagital del pie.
Por ejemplo, para un adolescente de 14 años, con una altura de 1, 60 metro y un peso de 50 kilos, el pie está compuesto por un conjunto de paralelepípedos rectángulos. La longitud total del pie es de 243 mm, el ancho es de 80 mm, la altura de talón es de 62 mm y la distancia entre la parte posterior del pie y la unión de los dedos es de 207 mm.
Actualmente, se han desarrollado numerosos robots humanoides, pero ninguno respeta el modelo de Hanavan. Además, los robots conocidos tienen pies anchos y macizos, bien sin ninguna movilidad, o bien con una movilidad pasiva al nivel de los dedos del pie. Tales pies degradan la fluidez del andar del robot y lo alejan sensiblemente de la manera de andar del ser humano.
Un cálculo dinámico, muestra que para andar a una velocidad de 1, 2 m/s, y siempre para un robot de 1, 60 m y 50 kg, la unión entre la suela y los dedos necesita un par del orden de 20 N.m, con una potencia de 30 W, y un desplazamiento articular de 0º a +60º.
La invención apunta a la mejora de la concordancia entre la realización de un robot y la anatomía humana, por ejemplo modelizada en el modelo de Hanavan. La invención apunta asimismo a la mejora de la fluidez de los movimientos del robot cuando anda, sin que por ello se reproduzca una modelización compleja del pie humano.
Para alcanzar estos objetivos, la invención propone la realización de un pie cuyos dedos son móviles respecto de la suela. Tal pie para robot humanoide es divulgado en el artículo “Toe Joints That Enhance Bipedal and Full body Motion of Humanoid Robots” publicado por el ETTT. La invención propone la aplicación de un par a la unión entre los dedos y la suela, sin que este par sea forzosamente dependiente del recorrido angular de los dedos en sus movimientos de rotación. En efecto, el hecho de aplicar tal par a la unión entre los dedos y la suela permite mejorar la fase propulsiva del pie del robot para acercarse a la que el pie humano asegura, con el fin de mejorar la fluidez del andar del robot.
Con este fin, la invención tiene por objeto un pie para robot humanoide, que puede conectarse a una pierna mediante un tobillo, caracterizado porque comprende:
• una suela (11) ,
• dedos (12) ,
• una unión (13) motorizada, independiente del tobillo, en rotación entre la suela (11) y los dedos (12) , pudiendo los dedos (12) desplazarse según un recorrido angular alrededor de un eje (14) de la unión (13) ,
• un accionador (19) que permite la motorización de la unión (13) ,
• y medios para controlar el accionador (19) de manera autónoma, permitiendo estos medios la elección de un estado entre:
− una rigidez completa de la unión, − un par de retorno en función del recorrido angular de la unión, − una amortiguación de la rotación de la unión, − un aporte energético durante la rotación de la unión.
La invención tiene asimismo por objeto un robot humanoide caracterizado porque comprende al menos un pie según la invención.
Se ha intentado aplicar a los dedos un par dependiente de su recorrido angular. Este par es aplicado mediante un resorte como por ejemplo un resorte de torsión colocado en la unión entre los dedos y la suela. Se ha constatado que tal par no daba resultados significativos en cuanto a la mejora de la fase propulsiva del pie.
La invención se entenderá mejor y otras ventajas se pondrán de manifiesto en la descripción detallada de un modo de realización ofrecida a título de ejemplo, descripción ilustrada por los dibujos adjuntos en los cuales:
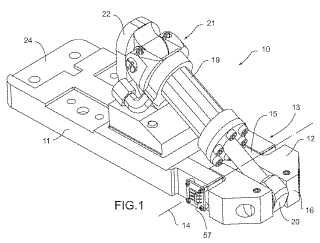
la figura 1 representa en perspectiva un pie conforme a la invención; la figura 2 representa el pie en corte en un plano sagital; la figura 3 representa el pie 10 en vista superior;
la figura 4 representa la articulación de un gato respecto de la suela; la figura 5 representa la articulación de dedos respecto de la suela; la figura 6 representa la articulación de los dedos respecto del gato;
Por motivos de claridad, los mismos elementos llevarán las mismas referencias en las diferentes figuras.
La figura 1 representa un pie 10 que comprende una suela 11 y dedos 12 articulados respecto de la suela 11 mediante una unión 13 que posee un grado de libertad en rotación en un plano sagital del pie 10 alrededor de un eje
14. En el ejemplo representado, los dedos 12 son solidarios y están realizados en una sola pieza mecánica monobloque. Los dedos tienen dos extremos 15 y 16. El extremo 15 está situado en el eje 14 y el extremo 16 forma la punta del pie 10. La unión 13 permite el desplazamiento de los dedos con un movimiento angular de aproximadamente 60º alrededor del eje 14. La figura 1 representa los dedos 12 en una primera posición de extremo en su movimiento de rotación alrededor del eje 14. En esta posición los dedos 12 están en la prolongación de la suela 11. Dicho de otro modo, la suela se extiende principalmente según un plano 17 y un eje 18 que pasa por los dos extremos 15 y 16 está situado en el plano 17 de la suela 11. La figura 2 representa el pie 10 en corte en un plano sagital perpendicular al plano 17 y la figura 3 representa el pie 10 en vista superior.
Una segunda posición de extremo de los dedos 12 es alcanzada cuando los dedos 12 están levantados al máximo, dicho de otro modo cuando el eje 18 que contiene los dos extremos 15 y 16 forma un ángulo de 60º con el plano 17 de la suela 11.
Durante el caminar del robot equipado con pies 10 que comprenden dedos 12 articulados, se puede aplicar un amortiguador como accionador. Tal accionador aplica a los dedos 12 un par que no depende del recorrido angular de los dedos 12 sino de su velocidad angular. En general, cuanto más importante es la velocidad angular, más importante es el par ejercido por el amortiguador. El uso de un amortiguador permite variar el par aplicado a la unión 13 en función de la velocidad a la cual el robot se desplaza andando. Cuando el robot corre, un amortiguador permite aplicar a la unión un par más importante que cuando anda. Evidentemente es posible complementar el par ejercido por el amortiguador con un par puramente proporcional a la carrera.
El accionador puede asimismo ser un motor para aplicar un par motor a la unión 13. Este par permite pasar los dedos 12 de la segunda posición de extremo a la primera posición de extremo. Este par, aplicado a los dedos 12, mejora la propulsión del robot generada por el pie 10 y reduce en aproximadamente el 30% la energía necesaria para caminar.
De manera más general, el pie comprende medios para controlar el accionador 19 de manera autónoma, es decir independientemente de cualquier otra articulación del robot. Por ejemplo, los movimientos de la unión 13 son independientes de los movimientos del tobillo del robot o de la fase de andar del robot. Los medios para controlar el accionador 19 permiten elegir un estado entre:
• una rigidez completa de la unión 13,
• un par de retorno en función del recorrido angular de la unión 13,
• una amortiguación de la rotación de la unión 13,
• un aporte energético durante la rotación de la unión 13.
Es posible realizar esta motorización mediante un motor rotativo que actúa entre la suela 11 y los dedos 12 al nivel de la unión 13. Este tipo de motor correría el riesgo de salirse del formato definido por el modelo de Hanavan. Otra alternativa... [Seguir leyendo]
Reivindicaciones:
1. Pie para robot humanoide, que puede conectarse a una pierna mediante un tobillo que comprende:
• una suela (11) ,
• dedos (12) ,
• una unión (13) motorizada, independiente del tobillo, en rotación entre la suela (11) y los dedos (12) , pudiendo los dedos (12) desplazarse según un recorrido angular alrededor de un eje (14) de la unión (13) ,
• un accionador (19) que permite la motorización de la unión (13) , caracterizado porque comprende, además, medios para controlar el accionador (19) de manera autónoma que permiten elegir un estado entre:
− una rigidez completa de la unión (13) , − un par de retorno en función del recorrido angular de la unión (13) , − una amortiguación de la rotación de la unión (13) , − un aporte energético durante la rotación de la unión (13) .
2. Pie según la reivindicación 1, caracterizado porque la unión (13) permite una rotación de los dedos (12) respecto de la suela (11) en un plano sagital del pie (10) .
3. Pie según una de las reivindicaciones anteriores, caracterizado porque el accionador está formado por un gato lineal (19) que se apoya sobre un montante (22) solidario a la suela (11) y sobre los dedos (12) , porque el gato (19) efectúa un movimiento según un eje (23) contenido en un plano sagital del pie.
4. Pie según una de la reivindicación 3, caracterizado porque cuando los dedos (12) están alineados respecto de la suela (11) , el eje (23) del gato está inclinado respecto de un plano principal de la suela (11) para permitir el descenso de los dedos (12) por debajo del plano principal de la suela 11.
5. Pie según una cualquiera de las reivindicaciones 3 o 4, caracterizado porque el apoyo del gato (19) sobre el montante (22) está situado por encima de un plano (17) en el cual la suela (11) se extiende principalmente para
mantener concurrente el eje (23) del gato (19) y un eje (18) que une la unión (13) y el apoyo del gato (19) sobre los dedos (12) .
6. Pie según una cualquiera de las reivindicaciones 3 a 5, caracterizado porque el gato (19) es eléctrico o hidráulico.
7. Pie según una cualquiera de las reivindicaciones 3 a 6, caracterizado porque el gato (19) es un gato de doble 30 efecto que permite bajar o levantar los dedos (12) .
8. Pie según una cualquiera de las reivindicaciones 3 a 6, caracterizado porque el gato (19) es un gato de efecto simple destinado a empujar los dedos (12) para bajarlos.
9. Robot humanoide, caracterizado porque comprende al menos un pie (10) según una de las reivindicaciones anteriores.
Patentes similares o relacionadas:
Aparatos y procedimientos para el accionamiento remoto de puntos de control, del 24 de Junio de 2020, de Stevenson, Robert L: Aparato para el accionamiento remoto de un punto de control , que comprende: un elemento alargado que tiene un primer extremo y un […]
Funda protectora de robot con una conexión rebordeada, del 10 de Junio de 2020, de Dürr Systems AG: Funda protectora de robot para un robot de revestimiento , en particular un robot de pintura , con a) un elemento de conexión […]
Adaptador de enchufe, instrumento de ajuste y robot asociado, del 22 de Abril de 2020, de KUKA Deutschland GmbH: Adaptador de enchufe, que presenta: - una rosca , que está configurada para atornillar el adaptador de enchufe a un instrumento de ajuste , - un dispositivo […]
Aparato y sistema de brazo articulado, del 8 de Abril de 2020, de VANRX Pharmasystems Inc: Aparato de brazo articulado multieje sellado herméticamente para su uso dentro de una cámara aisladora sellable, comprendiendo el aparato: […]
Sistema de traslación, del 8 de Abril de 2020, de SW Automation GmbH: Sistema de traslación para un dispositivo de manejo que cuente al menos con un elemento de guía y al menos con un cuerpo de carro que dicho […]
Pasador de cizallamiento para calibración de robots, del 1 de Abril de 2020, de ABB SCHWEIZ AG: Un pasador de cizallamiento para calibrar un robot industrial y configurado de modo que se monte en un soporte del pasador de calibración en el robot […]
Procedimiento para monitorizar una línea de suministro de un robot industrial y un dispositivo de control, del 25 de Marzo de 2020, de KUKA Deutschland GmbH: Procedimiento para monitorizar una línea de suministro de un robot industrial , que tiene una o más líneas guiadas en un conducto protector , para detectar […]
Sistema de carga eléctrica para un robot, del 18 de Marzo de 2020, de Locus Robotics Corp: Un sistema de carga eléctrica, que comprende: un conjunto de cargador eléctrico, incluyendo: una base del cargador a acoplarse a una fuente de energía eléctrica; […]