SISTEMA DE CAMBIO DE HERRAMIENTAS.
Sistema de cambio de herramientas para sistemas de transporte de piezas de trabajo en prensas,
que comprende una traviesa (Q) y una herramienta (T), en el que la herramienta (T) está constituida por al menos un soporte de base de la herramienta (1) y por brazos de herramienta (2) y porque los brazos de herramienta (2) se pueden sustituir individualmente, en el que el soporte de base de la herramienta (1) está dispuesto de forma desmontable para un proceso de equipamiento en la traviesa (Q) desplazable, y después de un cambio de los brazos de herramienta (2), que se realiza cuando el soporte de base de la herramienta (1) está desmontado, se puede fijar de nuevo en la traviesa (Q), en el que la conexión entre un brazo de la herramienta (2) y el soporte de base de la herramienta (1) se realiza por medio de una pieza de ajuste de acoplamiento (7), que se inserta de forma deslizante en un alojamiento (8) a lo largo de superficies de ajuste (9), en el que la pieza de ajuste de acoplamiento (7) se puede bloquear en el alojamiento (8), en el que una corriente de aire para la generación de vacío en una ventosa (3) es conducida a través de al menos un taladro (12) en la pieza de ajuste de acoplamiento (7) en el estado acoplado, caracterizado porque a través de la introducción de la pieza de ajuste de acoplamiento (7) en el alojamiento (8) se activa una válvula (13) dispuesta en el soporte de base de la herramienta (1), que libera la corriente de aire para la generación de vacío.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09003197.
Solicitante: MULLER WEINGARTEN AG.
Nacionalidad solicitante: Alemania.
Dirección: SCHUSSENSTRASSE 11 88250 WEINGARTEN ALEMANIA.
Inventor/es: MULLER, CHRISTIAN, Speh,Peter.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21D43/05 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 43/00 Dispositivos de alimentación, de alineamiento o de almacenado combinados con aparatos para trabajar o tratar la chapa, tubos o perfiles, dispuestos en estos aparatos o especialmente adaptados para ser utilizados en asociación con estos aparatos; Asociación de dispositivos de corte con estos aparatos (dispositivos de corte asociados a las herramientas, ver los grupos previstos para estas herramientas). › especialmente adaptados a las prensas de fases múltiples.
- B21D43/18 B21D 43/00 […] › por medio de dispositivos de conexión neumática o magnética con el material.
- B25J15/00 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Cabezas de aprehensión.
- B25J15/06 B25J […] › B25J 15/00 Cabezas de aprehensión. › con medios de retención magnéticos o que funcionan por succión.
- B25J19/00 B25J […] › Accesorios adaptados a los manipuladores, p. ej. para controlar, para observar; Dispositivos de seguridad combinados con los manipuladores o especialmente concebidos para ser utilizados en asociación con estos manipuladores (dispositivos de seguridad en general F16P; protección contra las radiaciones en general G21F).
- F16L37/26 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16L TUBERIAS O TUBOS; EMPALMES U OTROS ACCESORIOS PARA TUBERIAS; SOPORTES PARA TUBOS, CABLES O CONDUCTOS PROTECTORES; MEDIOS DE AISLAMIENTO TERMICO EN GENERAL. › F16L 37/00 Acoplamientos del tipo de acción rápida (manguitos de apriete radial F16L 17/04, F16L 21/06; empalmes de mangas con órganos rígidos F16L 33/00). › en los cuales el montaje se realiza por desplazamiento transversal de las partes del conjunto con o sin rotación de las mismas a continuación.
- F16L37/38 F16L 37/00 […] › con un obturador en uno solo de los dos extremos del tubo.
PDF original: ES-2376513_T3.pdf
Descripción:
Sistema de cambio de herramientas La presente invención se refiere a un sistema de cambio de herramientas de acuerdo con el preámbulo de la reivindicación 1 de la patente para sistemas de transporte de piezas en prensas, como por ejemplo trenes de prensas, prensas de aspiración compactas y prensas de transferencia de todo tipo. De la misma manera, el sistema de cambio de herramientas de acuerdo con la invención se puede utilizar en la alimentación de placas y en la extracción de piezas acabadas o bien en el apilamiento.
Un sistema de cambio de herramientas de este tipo se conoce a partir del documento US-B-6 182 491. El cometido de la invención es desarrollar un sistema de cambio de herramientas para sistemas de transporte de piezas de trabajo en prensas, que posibilita una sustitución sencilla y, en particular, automatizable, de las herramientas.
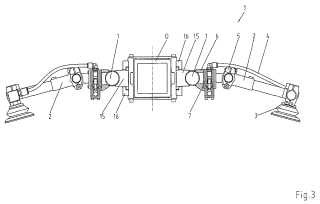
Este cometido se soluciona con un sistema de cambio de herramientas de acuerdo con las características de la reivindicación 1 de la patente. El sistema de cambio de herramientas está constituido por un soporte de base de herramientas 1 y por brazos de herramientas 2 fijados de forma sustituibles en él, de manera que el soporte de base 1 se puede fijar en una traviesa Q. La traviesa Q se indica en la figura 1 solamente por medio de una línea de puntos y trazos. En una vista en sección mostrada en la figura 3 se representa corporalmente la traviesa Q. El soporte de base 1 se puede insertar para la fijación en la traviesa Q con sus patas 15 en bolsas 16 de la traviesa Q. Las figuras 1 y 3 muestran, respectivamente, una traviesa Q, a la que está asociada una herramienta T, respectivamente, con dos soportes de base 1 y brazos de herramientas 2. En los brazos de herramientas 2 se encuentran unas ventosas 3 con conductos neumáticos 4 para la generación de un vacío en las ventosas 3. Los brazos de herramientas 2 estánfijados por medio de mecanismos de sujeción 5 en tubos de retención 6. Éstos están fijados de nuevo en piezas de ajuste de acoplamiento 7. Las piezas de ajuste de acoplamiento y los alojamientos 8 forman en el estado acoplado una unidad, que garantiza un posicionamiento exacto de los brazos de herramientas 2 con relación a los soportes de base de herramientas 1. El posicionamiento se realiza sobre las superficies de ajuste 9. Para el bloqueo de las piezas de ajuste de acoplamiento 7 en los alojamientos 8 sirven unos bulones de bloqueo 10. Estos bulones de bloqueo 10 se insertan en unión positiva en las piezas de ajuste de acoplamiento 7 para el bloqueo por medio de loas mangos 11. Para la alimentación de aire y de vacío, respectivamente de las ventosas 3 a través de los conductos neumáticos 4 sirve un taladro 12 en la pieza de ajuste de acoplamiento 7, a través del cual se libera desde una válvula de 3/2 pasos 13 en el estado acoplado. La conexión de la válvula de 3/2 pasos se realiza a través de un rodillo con recuperación elástica 14. El ciclo de funcionamiento durante la fijación o bien el acoplamiento de un brazo de herramienta 2 en un alojamiento 8 se representa de la siguiente manera.
En primer lugar se retira el bulón de bloqueo 10 con la ayuda del mango 11 y de esta manera se lleva a una posición desbloqueada. A continuación se introduce el brazo de herramienta 2 con el tubo de retención 6 y la pieza de ajuste de acoplamiento 7 en un alojamiento 8. En este caso, la pieza de ajuste de acoplamiento 7 y el alojamiento 8 se deslizan a lo largo de las superficies de ajuste 9. Durante la inserción de la pieza de ajuste de acoplamiento 7 en el alojamiento 8 se desplaza el rodillo con recuperación elástica 14 a una posición desbloqueada de la válvula de 3/2 pasos y de esta manera libera una corriente de aire, que genera un vacío a través del taladro 12 de la pieza de ajuste de acoplamiento 7 y a través del conducto neumático 4 en la ventosa 3. El desacoplamiento o bien la extracción funcionan en secuencia inversa.
La invención prevé también la posibilidad de un acoplamiento y desacoplamiento totalmente automático de los brazos de herramientas 2. Para el acoplamiento son concebibles también todas las demás conexiones por unión positiva o uniones por sujeción conocidas en el estado de la técnica. La invención prevé también otras posibilidades para la conexión de la válvula de 3/2 pasos 13. Se pueden realizar todos los medios de activación, que se activan a través de un contacto con la pieza de ajuste de acoplamiento.
Lista de signos de referencia 1 Soporte de base de la herramienta 2 Brazo de la herramienta 2 3 Ventosa 3 4 Conducto neumático 5 Mecanismo de sujeción 6 Tubo de retención 7 Pieza de ajuste de acoplamiento 8 Alojamiento 9 Superficie de ajuste 10 Bulón de bloqueo 11 Mango 12 Taladro en 7 13 Válvula de 3/2 pasos 14 Rodillos con recuperación elástica 15 Pata de 1
Zapata de Q Q Traviesa T Herramienta
Reivindicaciones:
1. Sistema de cambio de herramientas para sistemas de transporte de piezas de trabajo en prensas, que comprende una traviesa (Q) y una herramienta (T) , en el que la herramienta (T) está constituida por al menos un soporte de base de la herramienta (1) y por brazos de herramienta (2) y porque los brazos de herramienta (2) se 5 pueden sustituir individualmente, en el que el soporte de base de la herramienta (1) está dispuesto de forma desmontable para un proceso de equipamiento en la traviesa (Q) desplazable, y después de un cambio de los brazos de herramienta (2) , que se realiza cuando el soporte de base de la herramienta (1) está desmontado, se puede fijar de nuevo en la traviesa (Q) , en el que la conexión entre un brazo de la herramienta (2) y el soporte de base de la herramienta (1) se realiza por medio de una pieza de ajuste de acoplamiento (7) , que se inserta de forma 10 deslizante en un alojamiento (8) a lo largo de superficies de ajuste (9) , en el que la pieza de ajuste de acoplamiento (7) se puede bloquear en el alojamiento (8) , en el que una corriente de aire para la generación de vacío en una ventosa (3) es conducida a través de al menos un taladro (12) en la pieza de ajuste de acoplamiento (7) en el estado acoplado, caracterizado porque a través de la introducción de la pieza de ajuste de acoplamiento (7) en el alojamiento (8) se activa una válvula (13) dispuesta en el soporte de base de la herramienta (1) , que libera la corriente de aire para la generación de vacío.
2. Sistema de cambio de herramienta de acuerdo con la reivindicación 1, caracterizado porque la pieza de ajuste de acoplamiento (7) está conectada fijamente con un tubo de soporte (6) , que está fijado en el brazo de herramienta (2) por medio de un mecanismo de sujeción.
3. Sistema de cambio de herramientas de acuerdo con una de las reivindicaciones anteriores, caracterizado porque 20 la pieza de ajuste de acoplamiento (7) se bloquea por medio de un bulón de bloqueo (10) .
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
EXTREMIDAD ROBGTICA, ESLABON DE UNA EXTREMIDAD ROBOTICA Y METODO PARA PROPORCIONAR SOPORTE A UNA EXTREMIDAD ROBOTICA, CON MOVIMIENTO ANTROPOMORFO AJUSTABLE, del 28 de Mayo de 2020, de ORTEGA CARRILLO, Hernando: Extremidad robótíca, Eslabón de una extremidad robótica y Método para proporcionar soport a una extremidad robótica, estando o no energizados, por medio […]
Procedimiento de producción de una pieza, del 13 de Mayo de 2020, de Flex-N-Gate France: Procedimiento de producción de una pieza que incluye, al menos, un elemento de refuerzo fabricado a partir de un inserto fibroso de material […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Máquina para llenar y envasar frascos, cartuchos, jeringas y similares, del 1 de Abril de 2020, de I.M.A. INDUSTRIA MACCHINE AUTOMATICHE S.P.A.: Una máquina para llenar y envasar frascos, cartuchos, jeringas y similares, que comprende una pared que separa una cámara operativa en […]
DISPOSITIVO DE ACOPLAMIENTO ENTRE UN ROBOT Y UN CABEZAL, del 26 de Marzo de 2020, de ASOCIACIÓN CENTRO TECNOLÓGICO CEIT-IK4: Dispositivo de acoplamiento entre un robot y un cabezal (H, H') que actúa sobre una superficie de trabajo (S), que comprende un cuerpo(10,10')que […]
 Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Dispositivo para cargar productos encuadernados, del 26 de Febrero de 2020, de Lee, Sin-Young: Un aparato para cargar productos encuadernados , que comprende:
una unidad de bastidor de soporte que proporciona una distancia para mover […]
Sistema de laminado automatizado de chapas y método de colocación, del 19 de Febrero de 2020, de THE BOEING COMPANY: Un sistema para la colocación de chapas de compuesto en localizaciones preseleccionadas; que comprende: un robot ; un efector […]