CIP-2021 : B66C 13/46 : Indicadores de posición para cargas suspendidas o para elementos de grúas.
CIP-2021 › B › B66 › B66C › B66C 13/00 › B66C 13/46[2] › Indicadores de posición para cargas suspendidas o para elementos de grúas.
Notas[g] desde B66C 5/00 hasta B66C 15/00: Otras características comunes; Detalles
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B66 ELEVACION; LEVANTAMIENTO; REMOLCADO.
B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21).
B66C 13/00 Otras características de estructura o detalles.
B66C 13/46 · · Indicadores de posición para cargas suspendidas o para elementos de grúas.
CIP2021: Invenciones publicadas en esta sección.
Dispositivo de control remoto para grúa, máquina de construcción y/o camión industrial, y sistema que comprende este dispositivo de control remoto y una grúa, una máquina de construcción y/o un camión industrial.
(13/05/2020) Dispositivo de control remoto para una grúa, una máquina de construcción o un camión industrial, con un terminal móvil en forma de tableta que comprende una pantalla con función de pantalla táctil y tiene al menos un medio de entrada para introducir comandos de control en forma de un medio de visualización de pantalla táctil así como un dispositivo de transmisión de señales para transmitir los comandos de control introducidos a un dispositivo de control de la grúa, de la máquina de construcción o del camión industrial, caracterizado por que el terminal móvil está configurado para
- recibir datos de imagen de una cámara y/o datos digitales de un modelo de información de construcción (BIM),
- con ayuda de los datos de imagen recibidos de la cámara y/o…
Sistema para mover automáticamente un brazo articulado, en particular de una grúa de carga, hacia una posición objetivo.
(23/10/2019) Sistema para mover automaticamente un brazo articulado hacia una posicion objetivo, que comprende:
- dicho brazo articulado que comprende una pluralidad de cuerpos conectados consecutivamente que forman una cadena cinematica abierta con un efector final , que tiene una pluralidad de grados de libertad de traslacion y/o rotacion y una pluralidad de actuadores para mover dichos cuerpos;
- una pluralidad de sensores asociados a dichos cuerpos, adaptados para suministrar senales representativas de posiciones lineales o angulares para permitir la determinacion de las coordenadas absolutas del efector final ;
- un dispositivo de interfaz de usuario configurado para controlar el brazo articulado mediante un operador;
- una sonda de emision colocada…
Sistema para mover automáticamente un brazo articulado, particularmente de una grúa articulada.
(23/10/2019) Sistema para mover automáticamente un brazo articulado , que comprende:
- dicho brazo articulado , que comprende una pluralidad de cuerpos conectados consecutivamente entre sí para formar una cadena cinemática abierta con un efector final , que tiene una pluralidad de grados de libertad de traslación y/o rotación y una pluralidad de actuadores para mover dichos cuerpos;
- una pluralidad de sensores asociados a dichos cuerpos adaptados para suministrar señales indicativas de posiciones lineales o angulares para permitir determinar coordenadas absolutas del efector final ;
- un dispositivo de interfaz de usuario configurado para controlar el brazo articulado por un operador;
- una unidad de control que comprende un módulo de memoria y está operativamente conectada a dichos actuadores, dichos…
Dispositivo y procedimiento para controlar una oscilación de una carga suspendida en un aparato de elevación.
(25/09/2019) Un dispositivo para controlar una oscilación de una carga de masa m suspendida desde un elemento motorizado deslizable que puede moverse a lo largo de un eje sustancialmente horizontal, controlando el dispositivo de control una unidad de control y una plataforma inercial , siendo capaz la plataforma inercial de detectar valores representativos de un ángulo de inclinación de un cable que soporta la carga con respecto a la vertical y estando dotada de un medio para comunicar los valores a la unidad de control, en el que la unidad de control está dotada de un medio para medir y controlar la velocidad del elemento motorizado deslizable y es capaz de procesar…
Sistema de elevación para objetos alargados.
(18/09/2019) Un sistema de elevación para elevar objetos alargados que comprende:
un dispositivo sensor dispuesto para identificar la posición y ubicación de un objeto alargado,
un dispositivo de elevación y rotación, y
una unidad de control para controlar el movimiento de dicho dispositivo de elevación y rotación en respuesta a las señales del dispositivo sensor que indican la posición y ubicación del objeto, caracterizado por que:
dicho dispositivo de elevación y rotación está provisto de un dispositivo de agarre alargado que incluye un primer brazo de agarre, y
dicha unidad de control…
Dispositivo para soportar un cable de un cabestrante de una grúa.
(19/08/2019). Solicitante/s: O.ME.FA. S.p.A. Officina Meccanica Fassi. Inventor/es: CERESOLI,ROSSANO, SIGNORI,ROBERTO, MAFFEIS,IVAN.
Dispositivo para soportar un cable de un cabestrante de una grúa , comprendiendo:
- una estructura de soporte principal ;
- una polea soportada giratoriamente por la estructura de soporte principal , adaptada para guiar dicho cable del cabestrante ;
- un sensor para medir la posición angular de la polea ,
caracterizado por que la polea comprende una corona auxiliar que tiene una pluralidad de elementos sobresalientes dispuestos a lo largo de su circunferencia, y dicho sensor comprende un cuerpo estacionario enterizo con la estructura de soporte principal y una rueda , giratoria respecto al cuerpo estacionario , comprendiendo una corona deformable que engrana con la corona auxiliar de la polea y está hecha de un material tal que se deforma debido a la aplicación de dichos elementos sobresalientes , en donde dicho sensor comprende además medios para detectar la posición angular de la rueda respecto al cuerpo estacionario del sensor.
PDF original: ES-2722873_T3.pdf
SISTEMAS Y MÉTODOS DE ESTABILIDAD DE CARGA SUSPENDIDA.
(15/08/2019) 1. Un aparato de sistema de estabilidad de carga para estabilizar una carga suspendida a través de un cable desde arriba , comprendiendo el aparato:
un módulo central que comprende:
un punto de acoplamiento para el cable , y un punto de acoplamiento para la carga , un elemento estructural de tensión entre el punto de acoplamiento para el cable y el punto de acoplamiento para la carga, y una estructura de montaje de propulsor conectada al elemento estructural de tensión;
una fuente de alimentación ;
un conjunto de sensores que comprende:
un sistema de medición inercial ,
un sistema de medición de orientación , y
un sistema de medición de posición absoluta ;
un transmisor-receptor inalámbrico ; un controlador de propulsor ;
dos o más propulsores conectados…
Aparato y método para determinar de manera confiable la posición de un objeto.
(05/06/2019) Aparato para determinar de manera confiable la posición de un objeto con respecto a un movimiento relativo entre el objeto y una trayectoria , que comprende:
un detector unido o integrado en el objeto ,
al menos un marcador ubicado a lo largo de la trayectoria ,
en el que el al menos un marcador es detectado por el detector dentro de su rango de detección espacial para determinar la posición del objeto con respecto al marcador ,
medios de generación para proporcionar una representación gráfica definible o una secuencia de representación gráfica, en la que dicha representación gráfica o secuencia de representación gráfica es detectada por…
(03/04/2019) Grúa, en particular grúa torre rotatoria, con un pescante que puede girar en torno a un eje vertical y en el que está dispuesto de manera desplazable un montacargas desde el que discurre un cable de elevación unido con un gancho de carga , así como un dispositivo de determinación de la posición del gancho de carga para la determinación de la posición del gancho de carga, comprendiendo el dispositivo de determinación de la posición del gancho de carga una cámara dispuesta en el montacargas que está orientada en una dirección de visualización predefinida hacia abajo hacia el gancho de carga , una unidad de análisis de imagen para determinar la posición de imagen del gancho de carga en una imagen de cámara proporcionada por la cámara , así como medios de determinación de la posición para la determinación de la…
Agarradera para aparato de manipulación de carga y grúa.
(14/03/2019). Solicitante/s: KONECRANES GLOBAL CORPORATION. Inventor/es: MANNARI,VILLE, NIEMINEN,ARI, LEHTIÖ,JUSSI.
Una agarradera para un aparato de manipulación de carga, que comprende un dispositivo de medición de la distancia óptica y medios de sujeción (106, 206, 306a-c) que sujetan el dispositivo de medición de la distancia óptica de una manera flexible a la agarradera,
caracterizada porque los medios de sujeción (106, 206, 306a-c) comprenden una parte superior y al menos dos partes de soporte (214a, 214b, 314a-d) que se extienden hacia abajo desde la parte superior en una dirección vertical y que tienen en sus extremos inferiores partes flexibles (216a-b, 306a-c), el dispositivo de medición de la distancia óptica está sujeto a los medios de sujeción (106, 206, 306a-c) por dichas partes flexibles (216a-b, 306a-c).
PDF original: ES-2704053_T3.pdf
Manipulador de gran tamaño con mástil sometido a pandeo y con medios para la medición de ángulo de giro.
(12/03/2019) Manipulador de gran tamaño con un mástil sometido a pandeo desplegable, que presenta un asiento giratorio que puede girar alrededor de un eje vertical y una pluralidad de segmentos de mástil , en el que los segmentos de mástil pueden hacerse pivotar de manera limitada en articulaciones de pandeo alrededor de ejes de pandeo horizontales en cada caso, con respecto a un segmento de mástil adyacente o el asiento giratorio mediante una unidad de accionamiento en cada caso, con al menos un sensor de ángulo de giro (38, 38') que funciona sin contacto para el registro del ángulo de pandeo entre dos segmentos de mástil adyacentes o entre un segmento de mástil y el asiento giratorio adyacente ,
caracterizado…
Manejo de carga con un esparcidor.
(06/03/2019). Solicitante/s: KONECRANES GLOBAL CORPORATION. Inventor/es: MANNARI,VILLE, NIEMINEN,ARI.
Un procedimiento de manejo de carga con un esparcidor que incluye un sensor de distancia (308a, 308b) que transmite señales ópticas, comprendiendo el procedimiento:
manejar una carga que incluye una pluralidad de lados interconectados (312a, 312b);
seleccionar direcciones para transmitir señales ópticas;
medir distancias mediante señales ópticas reflejadas transmitidas en las direcciones seleccionadas;
caracterizado porque el procedimiento comprende determinar, en base a las distancias medidas, una línea de referencia que coincide con una forma de al menos uno de los lados interconectados (312a, 312b) de la carga para compensar un movimiento del sensor de distancia.
PDF original: ES-2702902_T3.pdf
Manejo de carga por dispositivo de manejo de carga.
(30/01/2019) Un procedimiento para manejar una carga mediante un dispositivo de manejo de carga que comprende un medio de agarre para agarrar al menos un punto de sujeción de la carga, comprendiendo el procedimiento:
determinar, en el medio de agarre, un mapa de distancia que incluye una pluralidad de puntos asociados con la información de distancia, y dentro de la zona del mapa de distancias se describen una parte de la zona de la carga a la que se une el medio de agarre y/o en la que se apila otra carga, así como los alrededores de la carga;
caracterizado por
determinar una pluralidad de mapas de distancia que describen diferentes zonas de las cargas dentro de las que se localizan los puntos de sujeción o los puntos de apilamiento;
…
(26/09/2018) Grúa, en particular grúa torre rotatoria, con un pescante que puede girar en torno a un eje vertical y en el que está dispuesto de manera desplazable un montacargas desde el que discurre un cable de elevación unido con un gancho de carga , así como un dispositivo de determinación de la posición del gancho de carga para la determinación de la posición del gancho de carga, comprendiendo el dispositivo de determinación de la posición del gancho de carga una cámara dispuesta en el montacargas que está orientada en una dirección de visualización predefinida hacia abajo hacia el gancho de carga , una unidad de análisis de imagen para determinar la posición de imagen del gancho de carga en una imagen de cámara proporcionada…
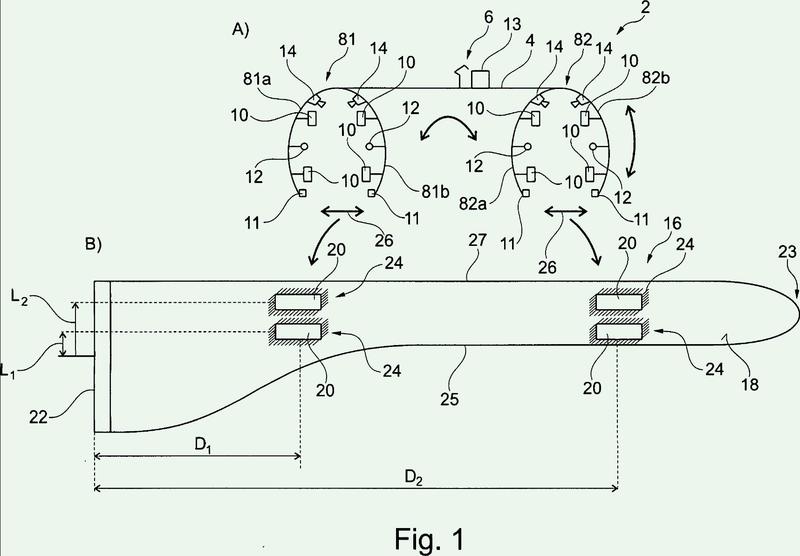
Técnicas para posicionar un vehículo.
(08/11/2017) Un sistema para determinar una ubicación (x_v, y_v) de un vehículo en un entorno provisto de una pluralidad de puntos de referencia (11, 11') cuya ubicación (x_b, y_b) es conocida, comprendiendo el sistema:
- al menos un sensor de distancia de exploración instalado en el vehículo y configurado para medir la distancia (R_c) y la dirección (a_c) desde el vehículo a al menos dos de la pluralidad de puntos de referencia (11, 11');
- un dispositivo de procesamiento de datos configurado para:
- almacenar en memoria la ubicación (x_b, y_b) de dichos al menos dos puntos de referencia;
- determinar una ubicación inicial…
Método para determinar al menos un ángulo de oscilación y/o un ángulo de rotación de una carga alojada en una grúa mediante al menos un medio de fijación a modo de un cable, así como método para atenuar movimientos de oscilación y/o movimientos de rotación de la carga.
(27/09/2017) Método para determinar al menos un ángulo de oscilación (Φ) y/o un ángulo de rotación (ψ) de una carga alojada en una grúa mediante al menos un elemento de sujeción a modo de un cable, donde la grúa presenta un brazo y un carro que puede desplazarse de forma lineal a lo largo del brazo mediante un dispositivo de accionamiento, en el cual la carga se encuentra fijada mediante al menos un medio de fijación a modo de un cable, y en la grúa se proporciona al menos un dispositivo óptico de detección para detectar un ángulo de oscilación (Φ) y/o un ángulo de rotación (ψ) de la carga , en donde
- mediante al menos un dispositivo óptico de detección se detecta un ángulo de oscilación (Φ) y/o un ángulo…
Método para controlar la orientación de una carga de grúa y una grúa de pescante.
(16/08/2017). Solicitante/s: LIEBHERR-WERK NENZING GMBH. Inventor/es: SAWODNY, OLIVER, SCHNEIDER, KLAUS, ARNOLD,ECKHARD, SCHAPER,DI ULF.
Método para controlar la orientación de una carga de grúa, en donde un manipulador para manipular la carga se conecta a una unidad de rotador a un gancho suspendido sobre cuerdas y un ángulo ηL de inclinación de la carga se controla mediante una unidad de control de la grúa,
Por medio de la cual,
la unidad de control es una unidad de control adaptativa en donde un estado del sistema estimado del sistema de grúa se determina mediante el uso de un modelo no lineal que describe las dinámicas de inclinación durante la operación caracterizada porque la no linealidad del modelo que describe las dinámicas de inclinación se refiere a la relación no lineal entre el ángulo de giro ◊ ≥ η L - φ C - φ D y el torque T reactivo resultante, por medio del cual φ C y φ D respectivamente se refieren al ángulo entre la unidad de rotador y la carga y un ángulo de rotación de la grúa.
PDF original: ES-2647590_T3.pdf
Sistema para la determinación de la posición de un contenedor en un vehículo y/o en su remolque que va a ser cargado con contenedores.
(08/06/2016) Sistema para la determinación de la posición de un contenedor en un vehículo y/o su remolque que va a ser cargado con contenedores en una zona de carga para contenedores , tal como una terminal de carga de contenedores, en donde un contenedor o contenedores son cargados en un vehículo y/ o su remolque y, en consecuencia, son descargados de éste o éstos por una grúa (10, 10a, 10b), que manipula los contenedores y se desplaza por la zona de carga por encima de un carril o carriles de tráfico (26, 26a, 26b) y que está equipada con un distribuidor de contenedores (23, 23a, 23b) que sujeta los contenedores por su parte superior y con un sistema de posicionamiento…
Método para la determinación óptica, automática, de una posición objetivo para un dispositivo de elevación de contenedores.
(30/03/2016) Método para posicionar un dispositivo de elevación de contenedores mediante un dispositivo de sujeción para contenedores , donde al menos una cámara 2D, como sensor que proporciona una imagen, está fijada en el dispositivo de elevación de contenedores con una parte saliente, y el sensor determina un área visual (A, B) orientada esencialmente de forma perpendicular hacia abajo, donde el sensor proporciona valores de medición desde un entorno del dispositivo de elevación de contenedores , en particular la vista superior del dispositivo de sujeción , a una unidad de cálculo, donde el dispositivo de sujeción presenta al menos una marca sobre su superficie, donde la unidad de cálculo forma datos a partir de los valores de medición, en base…
Grúa con mando a distancia.
(17/02/2016) Grúa, en particular una grúa giratoria de torre, grúa de pluma telescópica, grúa portuaria, etc., con un gancho de carga que puede subirse y bajarse, que puede trasladarse en una zona de trabajo de grúa mediante unos elementos de grúa móviles y el accionamiento de dispositivos de accionamiento asociados a los elementos de grúa, y un dispositivo de control con medios de introducción de datos para controlar los dispositivos de accionamiento, caracterizada porque está previsto un dispositivo de visualización para visualizar una representación gráfica de la zona de trabajo de grúa, en donde al dispositivo de visualización está asociados unos medios…
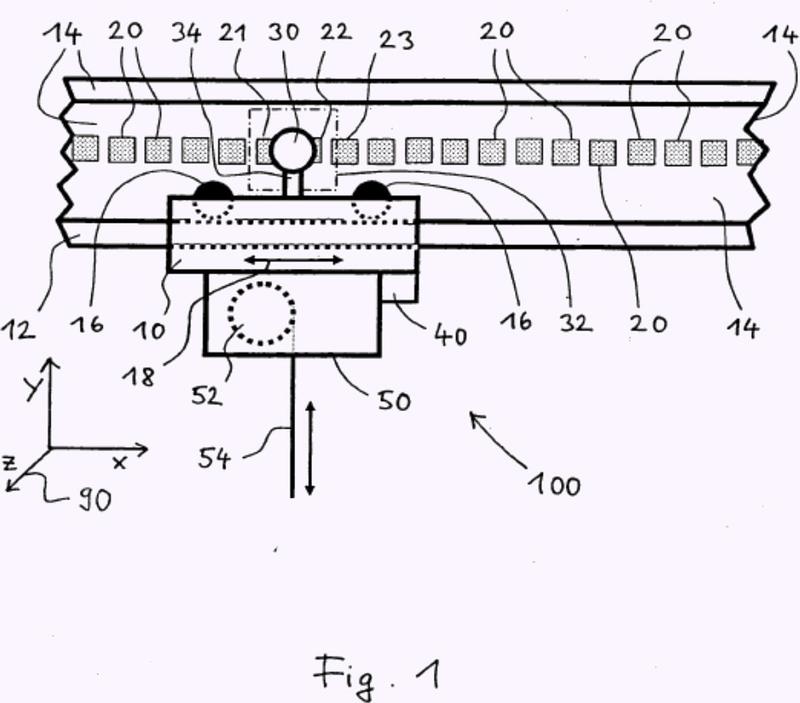
Procedimiento y dispositivo para la determinación de la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
(17/02/2016). Ver ilustración. Solicitante/s: PEPPERL + FUCHS GMBH. Inventor/es: Hofmann,Hilmar, Opper,Rüdiger, Kirsch,Martin.
Procedimiento para determinar la posición de un vehículo que se mueve a lo largo de una trayectoria estando dispuestos a lo largo de la trayectoria marcadores , especialmente soportes de código o códigos de barras, caracterizado porque los marcadores se registran con una cámara digital dispuesta en el vehículo y porque, mediante procesamiento de imágenes, a partir de la imagen de al menos una imagen de marcador (71 a 74) en el área de alcance de la cámara digital se determina una posición relativa del vehículo con respecto al marcador correspondiente o a los marcadores correspondientes en el sentido de un sentido de movimiento principal (x) del vehículo a lo largo de la trayectoria y en al menos un sentido (y, z) transversal con respecto al sentido de movimiento principal (x) y porque a partir de cambios del tamaño de las imágenes de marcadores (71 a 74) se determinan cambios de distancia (Δz) del vehículo con respecto a la trayectoria.
PDF original: ES-2564810_T3.pdf
Dispositivo y método de control para bloqueo de contenedor.
(17/02/2016) Un método para seleccionar una trayectoria, que comprende:
usar al menos un sensor de cerrojo de giro en una máquina para detectar una ubicación de un orificio de cerrojo de giro en un objeto;
transmitir dicha ubicación detectada a un procesador para calcular una trayectoria detectada para que un cerrojo de giro se acople a dicho orificio de cerrojo de giro;
usar al menos un sensor de entrada de operador para detectar una entrada desde un operador que mueve dicho cerrojo de giro para acoplarse a dicho orificio de cerrojo de giro;
transmitir dicha entrada de operador detectada a dicho procesador para calcular una trayectoria de…
Procedimiento y dispositivo para determinar un intervalo de mantenimiento de un vehículo, programa informático y producto de programa informático.
(08/02/2016) Procedimiento para determinar un intervalo de mantenimiento de un vehículo, que se mueve a lo largo de una pista , en donde se registran y archivan datos de posición del vehículo , en donde se determina al menos un parámetro de mantenimiento, en donde el parámetro de mantenimiento se compara con un valor de referencia prefijado y en donde para indicar cuándo debe realizarse el mantenimiento del vehículo se emite una señal, si el parámetro de mantenimiento está en una relación determinada con el valor de referencia, en especial si es mayor que el valor de referencia, caracterizado porque el vehículo es un teleférico monorraíl, una carretilla para estanterías elevadas, una instalación de grúa o un carro de grúa, porque a…
Procedimiento y dispositivo para la determinación de la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
(01/02/2016). Ver ilustración. Solicitante/s: PEPPERL + FUCHS GMBH. Inventor/es: Hofmann,Hilmar, Opper,Rüdiger, Kirsch,Martin.
Procedimiento para la determinación de la posición de un vehículo que se mueve a lo largo de una vía , estando dispuestos a lo largo de la vía marcadores , en particular soportes de código o códigos de barras, que son detectados con una cámara digital dispuesta en el vehículo , caracterizado porque a partir de una posición de al menos una imagen de marcador en la zona de detección de la cámara digital y de una forma de la imagen de marcador o de las imágenes de marcadores se determina una posición relativa del vehículo respecto al marcador correspondiente o a los marcadores correspondientes con ayuda de procesamiento de imagen, porque se determina al menos un ángulo de basculamiento (ß) de un eje óptico de la cámara digital respecto a la vía y porque a partir de la distancia (E) de la cámara digital de un marcador y del ángulo de basculamiento (ß) o de los ángulos de basculamiento se determina una posición real de la cámara digital encima de la vía.
PDF original: ES-2558022_T3.pdf
Transmisor de longitud de cable.
(28/01/2016) Transmisor de longitud de cable que comprende
a) una carcasa y/o marco,
b) un tambor de cable montado de manera giratoria en la carcasa y/o marco, sobre el que está previsto un cable de medición que puede enrollarse y desenrollarse,
c) un transmisor de velocidad angular, que detecta el número de giros del tambor de cable y d) un accionamiento de retorno para el tambor de cable, que enrolla el cable de medición desenrollado de nuevo sobre el tambor de cable,
e) un freno de corrientes parásitas para frenar el tambor de cable en caso de errores, en particular en caso de funcionamiento incorrecto y/o manejo incorrecto, en el que el freno de corrientes parásitas presenta una unidad de estator…
Grúa de segmentos telescópicos y procedimiento de control de la misma.
(20/01/2016) Grúa de segmentos telescópicos del tipo que consta de:
- un primer segmento dispuesto perpendicularmente sobre una plataforma móvil y unido a ella mediante una base rotatoria permitiendo su giro;
- un segundo segmento transversal y unido a un extremo distal de dicho primer segmento ; y
- un tercer segmento dotado de unos elementos de asido unido al extremo distal del segundo segmento y transversal al mismo,
- disponiendo la unión entre dichos primer segmento y segundo segmento de una primera articulación y dotada de unos primeros medios accionadores , que, por giro alrededor del eje de dicha primera articulación , permite variar el ángulo entre dichos primer segmento y segundo segmento , respecto al plano vertical formado por dichos primer y segundo segmentos (10 y 20)…
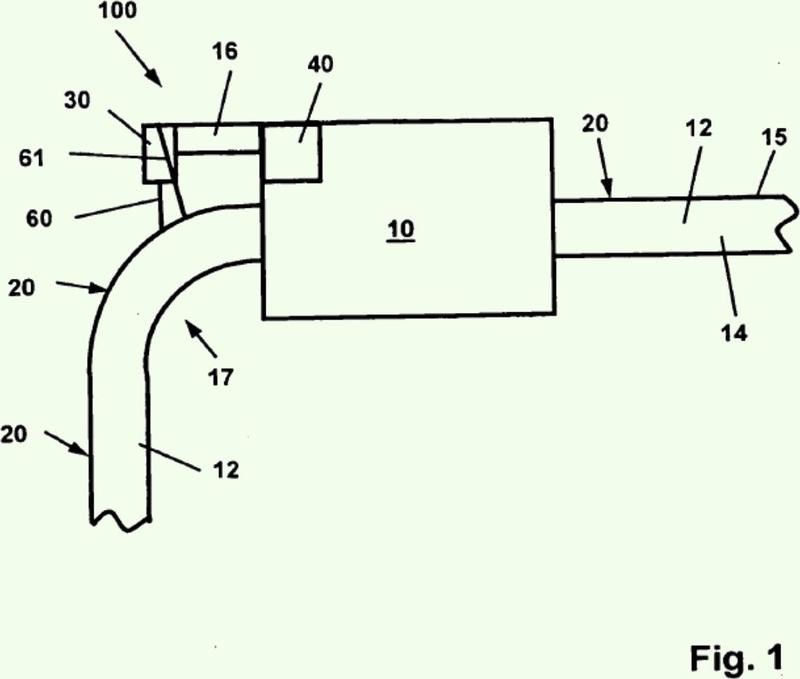
Dispositivo elevador y procedimiento para la manipulación de una pala de rotor y sistema que comprende un dispositivo elevador y una pala de rotor.
(20/01/2016). Ver ilustración. Solicitante/s: Areva Wind GmbH. Inventor/es: MONUX BELLOSO,OSCAR.
Undispositivo elevador para la manipulación de una pala de rotorde una turbina eólica, comprendiendo el dispositivo elevador al menosundispositivopara la puesta en contacto de una superficie externa de la pala de rotor con una zona de agarrepredeterminada, caracterizado porquela superficie externa de la pala de rotorcomprendeal menosuna marca invisible queindica una posicióny un contorno dela al menos una zona de agarre , ydondela marca invisible comprendeuna pintura o una etiqueta invisible a largo plazoqueesinvisible a simple vistacon luz diurnayel dispositivo elevador comprende además un detector para detectar la marca invisible.
PDF original: ES-2568264_T3.pdf
Procedimiento y dispositivo para determinar la posición de un vehículo, programa de ordenador y producto de programa de ordenador.
(13/01/2016) Procedimiento para determinar la posición de un vehículo, que se mueve a lo largo de una pista , en donde a lo largo de la pista están dispuestos unos marcadores , en especial unos soportes de datos o códigos de barras, en donde los marcadores se detectan con una cámara digital dispuesta sobre el vehículo , y en donde mediante tratamiento de imágenes a partir de una posición de al menos una imagen de marcador, dentro del margen de detección de la cámara digital , se determina una posición relativa del vehículo con relación al respectivo marcador o el marcador respectivo, caracterizado porque en base a los datos de medición de un sensor de aceleración acoplado al vehículo se determina un recorrido (s) cubierto por el vehículo hasta un momento de consulta (t), porque se calcula una posición…
Grúa y procedimiento para controlar una grúa.
(15/07/2015) Procedimiento para controlar y/o detectar datos de una grúa , en donde al menos una instalación de medición sobre la grúa envía uno o varios valores de medición para determinar la posición de al menos un medio de sujeción de carga, en especial el gancho de grúa , en donde se realiza un cálculo de la posición del medio de sujeción de carga sobre la base del uno o de los varios valores de medición de al menos una instalación de medición, así como de uno o varios datos característicos de la rigidez de la grúa, caracterizado porque se genera un modelo de grúa que tiene en cuenta la rigidez de la grúa y se tiene en cuenta para calcular la posición del medio de sujeción de carga.
Procedimiento para la determinación de posición georreferenciada de contenedores en la zona de carga de grúas para contenedores.
(03/06/2015) Procedimiento para la determinación de posición georreferenciada de contenedores ,
especialmente en la zona de carga de grúas para contenedores , en el que se realiza una determinación de posición asistida por satélites de la grúa para contenedores y del vehículo de transporte que recoge y deposita los contenedores , caracterizado porque para detectar las coordenadas de posición absolutas de los contenedores situados en la sombra de recepción de los satélites, en un primer paso de procedimiento se realiza una medición de distancia entre al menos un punto de medición en el vehículo de transporte y uno o varios puntos de medición en la grúa para contenedores , porque en un segundo paso de procedimiento, las coordenadas de posición de la grúa para contenedores obtenidas por determinación de posición asistida…
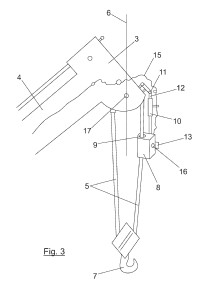
SISTEMA PARA INFORMAR DEL DESPLOME DE GRUAS Y APARATOS DE ELEVACIÓN CON RESPECTO A LA CARGA.
(30/04/2015) Sistema para informar del desplome de grúas y aparatos de elevación con respecto a la carga, que dispone de al menos un cable de elevación para la carga y que consiste en poner un inclinómetro asociado a dicho cable, capaz de detectar la posición angular del eje vertical de elevación y transmitirla a un controlador accesible para el operador de la grúa.
SISTEMA PARA INFORMAR DEL DESPLOME DE GRUAS Y APARATOS DE ELEVACIÓN CON RESPECTO A LA CARGA.
(02/04/2015). Ver ilustración. Solicitante/s: IZQUIERDO HERNÁNDEZ, Yoel Orlando. Inventor/es: IZQUIERDO HERNÁNDEZ,Yoel Orlando.
Sistema para informar del desplome de grúas y aparatos de elevación con respecto a la carga, que dispone de al menos un cable de elevación para la carga y que consiste en poner un inclinómetro asociado a dicho cable, capaz de detectar la posición angular del eje vertical de elevación y transmitirla a un controlador accesible para el operador de la grúa.
{kind=link}
{kind=link}
{kind=link}
{kind=link}