Robot autónomo de cubrimiento compacto.
Un robot autónomo de cubrimiento (100, 101) que comprende:
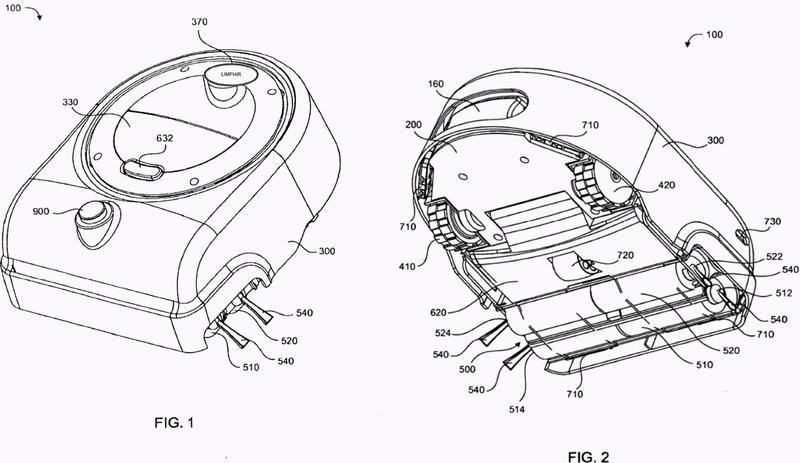
un chasis (200) que tiene una parte delantera (210) y una parte posterior (220),
definiendo la parte delantera (210) una forma sustancialmente rectangular y definiendo la parte posterior (220) una forma arqueada;
un sistema de accionamiento (400) portado por la parte posterior (220) del chasis (200) y configurado para maniobrar el robot (100, 101) sobre una superficie de limpieza, comprendiendo el sistema de accionamiento (400) ruedas motrices derecha e izquierda (410, 420) accionadas de manera diferencial por motores correspondientes derecho e izquierdo (412, 422);
un controlador (450) en comunicación con el sistema de accionamiento (400), donde el controlador (450) está configurado para maniobrar el robot (100, 101) a fin de que pivote sobre sí mismo;
un conjunto de limpieza (500) montado en la parte delantera (210) del chasis (200);
un compartimento de basura (610) dispuesto adyacente al conjunto de limpieza (500) y configurado para recibir residuos agitados por el conjunto de limpieza (500);
un acelerómetro (458) en comunicación con el controlador (450), controlando el controlador (450) el sistema de accionamiento (400) en respuesta a una señal recibida desde el acelerómetro (458),
caracterizado por que el conjunto de limpieza (500) comprende un primer cepillo de rodillo (510) montado de manera giratoria en un borde delantero (202) del chasis (200).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E12195252.
Solicitante: IROBOT CORPORATION.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 8 CROSBY DRIVE BEDFORD, MA 01730 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MAMMEN,JEFFREY W, SCHNITTMAN,MARK, DUBROVSKY,ZIVTHAN A, SOLOCHEK,AARON.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A47L11/40 NECESIDADES CORRIENTES DE LA VIDA. › A47 MOBILIARIO; ARTICULOS O APARATOS DE USO DOMESTICO; MOLINILLOS DE CAFE; MOLINILLOS DE ESPECIAS; ASPIRADORES EN GENERAL. › A47L LAVADO O LIMPIEZA DOMESTICA (cepillos A46B; limpieza de grandes cantidades de botellas o de otros objetos huecos de una sola especie B08B 9/00; lavado de la ropa D06F ); ASPIRADORES EN GENERAL (limpieza en general B08). › A47L 11/00 Máquinas para limpiar los suelos, las alfombras, los muebles, las paredes o sus revestimientos. › Elementos o partes constitutivas de máquinas no previstas en los grupos A47L 11/02 - A47L 11/38, o no limitadas a uno de estos grupos, p. ej. empuñaduras, disposición de los interruptores, bordes, amortiguadores, palancas.
- A47L9/00 A47L […] › Partes constitutivas o accesorios de aspiradores, p. ej. medios mecánicos para controlar la aspiración o para producir una acción de batido; Dispositivos para la conservación ordenada de los aspiradores o de sus piezas; Vehículos portadores especialmente concebidos para los aspiradores.
- A47L9/04 A47L […] › A47L 9/00 Partes constitutivas o accesorios de aspiradores, p. ej. medios mecánicos para controlar la aspiración o para producir una acción de batido; Dispositivos para la conservación ordenada de los aspiradores o de sus piezas; Vehículos portadores especialmente concebidos para los aspiradores. › con cepillos o agitadores controlados.
- A47L9/28 A47L 9/00 […] › Montaje del equipo eléctrico, p. ej. adaptación o fijación al aspirador; Control de los aspiradores por medios eléctricos.
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2571739_T3.pdf
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]