Dispositivo de control para una unidad de propulsión híbrida.
Un dispositivo de control de una unidad de propulsión híbrida,
en donde un motor principal de ayuda (5) se conecta a través de una transmisión (6) a un miembro de salida (2), al que un par producido por un motor primario principal (1) es transmitido,
constando de unos medios de corrección de par de ayuda (28, 29, 30) para corregir el par de dicho motor principal de ayuda (5) en el sentido de suprimir el cambio en el par de dicho miembro de salida (2), en el cambio de marchas de dicha transmisión (6);
donde dicho motor principal de ayuda está construido por un generador de motor (5);
en que dichos medios de corrección de par de ayuda (28, 29, 30) incluyen unos medios de corrección (28, 29, 30) para corregir para reducir el par de dicho motor principal de ayuda (5) después de que se decida el inicio de una fase de inercia en el cambio de marchas en dicha transmisión (6);
constando de un lado de aplicación del dispositivo de acoplamiento de fricción (B1, B2) que se aplicará a dicho cambio de marchas;
constando de un lado de liberación del dispositivo de acoplamiento por fricción (B1, B2) que se liberará en dicho cambio de marchas;
donde dichos medios de corrección de par de ayuda (28, 29, 30) incluyen unos medios de corrección (28, 29, 30) para corregir para aumentar el par de dicho motor principal de ayuda (5) cuando dicho lado de liberación del dispositivo de acoplamiento por fricción (B1, B2) se libera gradualmente mientras se desliza;
caracterizadopor unos medios de aprendizaje (27) para el aprendizaje de la relación entre la capacidad de par y la presión de aplicación de dichos dispositivos de acoplamiento por fricción (B1, B2) sobre la base del par generado en dicho motor principal de ayuda (5) y la presión de aplicación de dichos dispositivos de acoplamiento por fricción (B1, B2); y
por unos medios de control de cambio (27) para controlar el par motor de cualquiera de dicho motor primario de ayuda (5) o dicho motor principal primario (1) durante el cambio de marchas por dicha transmisión (6), sobre la base de los resultados aprendidos por dichos medios de aprendizaje (27).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07121990.
Solicitante: TOYOTA JIDOSHA KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 1, TOYOTA-CHO TOYOTA-SHI, AICHI-KEN 471-8571 JAPON.
Inventor/es: ENDO,HIROATSU, OZEKI,TATSUYA, SUGIYAMA,MASATAKA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K1/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 1/00 Disposiciones o montaje de conjuntos de propulsión eléctricos (B60K 7/00 tiene prioridad; disposiciones o montaje de varios motores principales diferentes para una propulsión recíproca o común B60K 6/00; transmisiones eléctricas B60K 17/12; equipamiento eléctrico o propulsión de vehículos con tracción eléctrica en sí B60L; colectores de corriente para líneas de alimentación de energía sobre vehículos propulsados eléctricamente B60L 5/00). › que comprenden más de un motor eléctrico.
- B60K6/365 B60K […] › B60K 6/00 Disposiciones o montaje de varios motores principales diferentes para una propulsión recíproca o común, p.ej. sistemas de propulsión híbridos que comprenden motores eléctricos y de combustión interna. › con movimiento orbital de los engranajes.
- B60K6/445 B60K 6/00 […] › De tipo distribución por engranaje diferencial.
- B60K6/48 B60K 6/00 […] › De tipo paralelo.
- B60K6/485 B60K 6/00 […] › De tipo asistido por motor.
- B60K6/547 B60K 6/00 […] › siendo la transmisión una transmisión escalonada.
- B60L11/14
- B60W10/04 B60 […] › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de las unidades de propulsión.
- B60W10/06 B60W 10/00 […] › incluyendo el control de motores de combustión.
- B60W10/08 B60W 10/00 […] › incluyendo el control de unidades de tracción eléctrica, p.ej. motores o generadores.
- B60W10/10 B60W 10/00 […] › incluyendo el control de cajas de cambio de velocidades.
- B60W10/11 B60W 10/00 […] › Engranajes escalonados .
- B60W20/00 B60W […] › Sistemas de control especialmente adaptados a vehículos híbridos.
- F16H3/72 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 3/00 Transmisiones de engranajes para transmitir un movimiento rotativo con una relación de velocidad variable o para invertir el movimiento rotativo (mecanismos, cambio de velocidad o de insersión F16H 59/00 - F16H 63/00). › con un accionamiento secundario, p. ej. un motor regulador para hacer variar la velocidad de una manera continua.
- F16H59/40 F16H […] › F16H 59/00 Entradas de control de transmisiones que transmiten un movimiento rotativo para cambios de velocidad o para mecanismos de inversión. › Velocidad del eje de salida.
- F16H59/42 F16H 59/00 […] › Velocidad del eje de entrada.
- F16H61/04 F16H […] › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › Regularización del cambio de la relación.
- F16H61/16 F16H 61/00 […] › que impiden un cambio de la relación en caso de condiciones desfavorables (F16H 61/18 tiene prioridad).
- F16H61/686 F16H 61/00 […] › con engranajes orbitales.
- F16H63/12 F16H […] › F16H 63/00 Salidas de control de transmisiones que transmiten un movimiento rotativo para cambios de velocidad o para mecanismos de inversión. › siendo efectuados varios movimientos diferentes simultáneamente.
- F16H63/50 F16H 63/00 […] › señales hacia un motor.
PDF original: ES-2380554_T3.pdf
Fragmento de la descripción:
Dispositivo de control para una unidad de propulsión híbrida.
Campo técnico
Esta invención se refiere a un dispositivo de control para una unidad de propulsión híbrida, de acuerdo con el preámbulo de la reivindicación 1, donde un motor principal de ayuda está conectado a través de una transmisión a un elemento de salida, al cual se transmite un par desde un primer motor principal.
Estado de la técnica
En una unidad de propulsión híbrida para vehículos, un motor de combustión interna como un motor de gasolina o un motor diésel y un dispositivo eléctrico, como un motor generador se utilizan generalmente como motores primarios.
Los modos de combinación de los motores de combustión interna y del dispositivo eléctrico son varios, y el número de dispositivos eléctricos que se utilizan no se limita a uno, pero pueden ser varios.
En JP-A-2002-225578, por ejemplo, se describe la unidad de propulsión híbrida, en la que un motor y un primer motor generador se conectan entre sí a través de un mecanismo de síntesis/distribución compuesto de un mecanismo de piñón simple de engranajes planetarios para que el par sea transmitido desde el mecanismo de la síntesis/distribución hacia un elemento de salida, y en el que un segundo motor generador está conectado con el elemento de salida a través de un mecanismo de cambio de marchas de modo que el par de salida del segundo motor generador se añade de la forma conocida como "par de ayuda" al elemento de salida.
Por otra parte, el mecanismo de la palanca de cambios está construido con un mecanismo de engranajes planetarios capaces de ser intercambiados entre dos etapas de alta y baja, es decir, un estado de conexión directamente y un estado de desaceleración.
En el estado de conexión directamente, el par del segundo motor generador se aplica tal como es al elemento de salida.
En el estado de desaceleración, por otro lado, el par del segundo motor generador segunda es elevado y se aplica al elemento de salida.
En la unidad de propulsión híbrida mencionada anteriormente, el segundo motor generador es controlado en un modo de regeneración de manera que un par positivo o un par negativo se puedan aplicar al elemento de salida.
Por otra parte, un estado de desaceleración puede ser fijado por la transmisión de manera que el segundo motor generador se puede cambiar por uno de bajo par o de pequeño tamaño.
Aquí, en JP-A-2000-295709, se describe un dispositivo, en el que los motores generadores primero y segundo se disponen en el lado de aguas arriba (o el lado del motor) de una transmisión capaz de ser conmutada a modos altos y bajos, por lo que el tiempo de cambio de marcha se puede hacer prácticamente constante mediante el control de los pares de los motores generadores individuales en el momento de cambio de la transmisión.
Cuando un cambio de marchas de este dispositivo es ejecutado mediante un embrague de pinzas, un par adicional correspondiente a un par de arrastre se determina y se aplica por el motor eléctrico para que la velocidad del embrague rápidamente pueda llegar a una velocidad síncrona.
En JP-A-6-319210, por otro lado, se describe un dispositivo, en el que el par de salida del motor se transmite a un elemento de entrada predeterminado de una transmisión y un motor generador está conectado al elemento de entrada de modo que el motor generador se controla para suavizar el par de salida, es decir, para absorber un par de inercia en el momento del cambio.
En la patente japonesa No. 2926959, por otra parte, se describe un dispositivo, en el que la salida de una fuente de generación de energía se convierte en un estado de propulsión o un estado propulsado, cuando el estado de propulsión o el estado propulsado no se puede decidir claramente, se ejecuta a continuación un cambio de marchas.
En JP-A-6-319210, por otra parte, se describe un dispositivo, en el que un par de motor se reduce a una fase de inercia o en su etapa final de absorber un par de inercia con el fin de reducir los impactos en el momento del cambio de una transmisión montada en una unidad de propulsión híbrida.
En JP-A-9-32237, por el contrario, se describe una unidad de propulsión híbrida con una transmisión, en la que la presión inicial del aceite de un dispositivo de acoplamiento por fricción para participar en el cambio de marchas de la transmisión se aprende sobre la base de una cantidad de corrección de un motor para la entrada de un par a la transmisión.
De acuerdo con el dispositivo descrito en JP-A-2.002-225578, el par generado por el motor primario principal compuesto por el motor y el primer motor generador, se transmite al elemento de salida, mientras que el par generado desde el segundo motor generador puede ser transmitido al elemento de salida.
Por lo tanto, la construcción de motor del primer motor principal se ejecuta por la optimización del consumo de combustible para que el defecto o exceso de par motor demandado en ese estado pueda ser suplementado por el segundo motor generador.
Además, el dispositivo cuenta con la transmisión de manera que el par del segundo motor generador pueda ser elevado y se transmita al elemento de salida.
Como resultado de ello, el segundo motor generador puede tener un tamaño pequeño o una baja capacidad.
El dispositivo mencionado anteriormente tiene ventajas, pero los choques pueden ocurrir en el caso de que la operación de cambio de marchas sea realizada por la transmisión.
En concreto, la velocidad de rotación de cualquier elemento rotativo se cambia por el cambio de marchas de modo que un par de inercia es establecido por el cambio en la velocidad de rotación y afecta al par de salida.
Este cambio en el par de salida puede aparecer como los choques.
En el caso de que el cambio de marchas se realice mediante la aplicación o liberación del dispositivo de acoplamiento por fricción, por otra parte, la capacidad de par del dispositivo de acoplamiento por fricción disminuye transitoriamente para restringir el par que puede ser añadido por el segundo motor generador.
Como resultado, el par de salida total de la unidad de propulsión híbrida o el par motor del vehículo pueden variar durante el cambio de marchas, lo que causa los choques.
Por otro lado, la transmisión en la unidad de propulsión híbrida, como se describe en JP-A-2002-225578, se construye para cambiar los engranajes en dos etapas de baja (o etapa de baja velocidad) y de alta (o de etapa directa),por un freno y embrague.
En el momento de cambiar, por lo tanto, uno de los frenos y el embrague se libera mientras que el otro se aplica de manera que ambos tienen que ser controlados de forma coordinada.
Este control tiene una tendencia a alargar el período de tiempo necesario para el cambio de marchas.
Durante este cambio de marcha, además, la capacidad de transmisión del par de la transmisión se reduce.
Por lo tanto, la caída en el par de torsión del eje de salida puede ser más profunda, no sólo por la reducida capacidad de par, sino también por el largo período de tiempo de cambio.
En el antes mencionado dispositivo que se describe en JP-A-2.002-225578, en el cambio de marchas en el caso donde el llamado "par de ayuda" es realizado por el segundo motor generador, por ejemplo, la capacidad de par en la transmisión, es decir, la capacidad de par del dispositivo de acoplamiento por fricción para participar en el engranaje de cambio ejerce influencia sobre el par de torsión del eje de salida.
En el caso de que el par que se transmite desde el motor de combustión interna al eje de salida mediante el control del primer motor generador, se controla en el tiempo del cambio, por otra parte, es necesario para controlar el par del primer motor generador de acuerdo a la capacidad de par en la transmisión.
Sin embargo, la relación entre la presión a aplicar y la capacidad de par del dispositivo de acoplamiento por fricción, como el embrague o el freno no es constante debido a las diferencias individuales o al envejecimiento de modo que el par que aparece en el eje de salida en el tiempo del cambio puede llegar a ser diferente del previsto para reducir los choques.
En el caso del llamado "par de ayuda" en el tiempo... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo de control de una unidad de propulsión híbrida, en donde un motor principal de ayuda (5) se conecta a través de una transmisión (6) a un miembro de salida (2), al que un par producido por un motor primario principal (1) es transmitido,
constando de unos medios de corrección de par de ayuda (28, 29, 30) para corregir el par de dicho motor principal de ayuda (5) en el sentido de suprimir el cambio en el par de dicho miembro de salida (2), en el cambio de marchas de dicha transmisión (6);
donde dicho motor principal de ayuda está construido por un generador de motor (5);
en que dichos medios de corrección de par de ayuda (28, 29, 30) incluyen unos medios de corrección (28, 29, 30) para corregir para reducir el par de dicho motor principal de ayuda (5) después de que se decida el inicio de una fase de inercia en el cambio de marchas en dicha transmisión (6);
constando de un lado de aplicación del dispositivo de acoplamiento de fricción (B1, B2) que se aplicará a dicho cambio de marchas;
constando de un lado de liberación del dispositivo de acoplamiento por fricción (B1, B2) que se liberará en dicho cambio de marchas;
donde dichos medios de corrección de par de ayuda (28, 29, 30) incluyen unos medios de corrección (28, 29, 30) para corregir para aumentar el par de dicho motor principal de ayuda (5) cuando dicho lado de liberación del dispositivo de acoplamiento por fricción (B1, B2) se libera gradualmente mientras se desliza;
caracterizado por unos medios de aprendizaje (27) para el aprendizaje de la relación entre la capacidad de par y la presión de aplicación de dichos dispositivos de acoplamiento por fricción (B1, B2) sobre la base del par generado en dicho motor principal de ayuda (5) y la presión de aplicación de dichos dispositivos de acoplamiento por fricción (B1, B2); y
por unos medios de control de cambio (27) para controlar el par motor de cualquiera de dicho motor primario de ayuda (5) o dicho motor principal primario (1) durante el cambio de marchas por dicha transmisión (6), sobre la base de los resultados aprendidos por dichos medios de aprendizaje (27).
2. El dispositivo de control de una unidad de propulsión híbrida de la reivindicación 1, caracterizado:
en que dichos medios de corrección de par de ayuda (28, 29, 30) incluyen unos medios de corrección (28, 29, 30) para corregir para aumentar el par de dicho motor principal de ayuda (5) antes de que se decida el inicio de una fase de inercia en el cambio de marchas en dicha transmisión (6).
3. El dispositivo de control de una unidad de propulsión híbrida de la reivindicación 1, caracterizado:
en que dicha transmisión (6) incluye dichos dispositivos de acoplamiento por fricción (B1, B2) para la ejecución de un cambio de marchas por cambio del estado de aplicación/liberación; y
en que dichos medios de corrección de par de ayuda (28, 29, 30) incluyen dichos medios de corrección (28, 29, 30) para controlar el par de dicho motor principal de ayuda (5) de forma coordinada con el control de cualquiera de la capacidad de par de fricción de dichos dispositivos de acoplamiento (B1, B2) o la cantidad de control relativa a la capacidad de par.
4. El dispositivo de control de una unidad de propulsión híbrida de la reivindicación 1, caracterizado por:
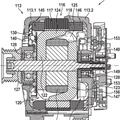
en que dicho motor principal primario (1) incluye: un mecanismo de engranajes (12) para las acciones del diferencial con tres elementos de un elemento de entrada (19), un elemento de reacción (17) y un elemento de salida (18); un motor de combustión interna (10) conectado a dicho elemento de entrada (19), y un generador de motor (11) conectado a dicho elemento de reacción (17), de los cuales dicho elemento de salida (18) está conectado a dicho miembro de salida (2).
5. El dispositivo de control de una unidad de propulsión híbrida de la reivindicación 1, caracterizado:
en que dicha transmisión (6) consta de un mecanismo de engranajes que incluye un tipo de mecanismo de engranajes planetarios Ravignaux con un mecanismo de engranajes planetarios de piñón simple y un mecanismo de engranajes planetarios de piñón doble en combinación.
6. El dispositivo de control de una unidad de propulsión híbrida de la reivindicación 1, caracterizado:
en que dicha transmisión (6) incluye un mecanismo de engranajes que incluye: un equipo de primer sol (21) que se fija de forma selectiva mediante un freno (B1), una corona dentada (25) dispuesta concéntricamente de dicho primer engranaje planetario (21) y adaptada para ser selectivamente fijada por otro freno (B2), un piñón primero (23) que engrana con dicho primer engranaje planetario (21), un segundo piñón (24) que engrana con el piñón primero (23) y dicha corona (25); un equipo de segundo sol (22) que engrana con dicho piñón segundo (24) y conectado a dicho motor principal de ayuda (5), y un soporte (26) que contiene los piñones individuales (23, 24) en forma de rotación sobre sus ejes y girando alrededor y conectado a dicho miembro de salida (2).
Patentes similares o relacionadas:
Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, del 29 de Abril de 2020, de IVECO S.P.A.: Línea motriz de un vehículo híbrido, en particular de un vehículo industrial o comercial, comprendiendo la línea motriz: - una caja de engranajes (GR) que […]
Vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática, del 8 de Abril de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un operador de acelerador […]
 Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
Procedimiento para manejar un sistema, sistema, control y producto de programa de ordenador, del 26 de Febrero de 2020, de ROBERT BOSCH GMBH: Procedimiento para manejar un sistema para un vehículo de motor, comprendiendo el sistema un control , una red de a bordo de alta tensión , una […]
CONJUNTO PARA LIMITACION DE VELOCIDAD DE FORMA AUTOMÁTICA EN VEHÍCULOS, del 20 de Noviembre de 2019, de MARTINEZ BONET, Francisco Jose: 1. Conjunto para limitación de velocidad de forma automática en vehículos caracterizado porque comprende un asistente de velocidad encargado […]
Máquina de trabajo autopropulsada, así como procedimiento para frenar una máquina de trabajo de esa clase, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular un camión volquete o camión, con un accionamiento eléctrico que comprende al menos un motor […]
Máquina de trabajo autopropulsada así como procedimiento para frenar una máquina de trabajo de este tipo, del 6 de Noviembre de 2019, de Liebherr-Components Biberach GmbH: Máquina de trabajo autopropulsada, en particular vehículo oruga tal como una niveladora, con un accionamiento eléctrico que comprende al menos un motor […]
Aparato de control para un vehículo y método de control para un vehículo, del 19 de Junio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un aparato de control para un vehículo , incluyendo el vehículo un motor de combustión , un primer motor eléctrico (MG1), un elemento rotativo […]
Aparato de transmisión automática y vehículo del tipo de montar a horcajadas equipado con el aparato, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo del tipo de montar a horcajadas equipado con un aparato de transmisión automática , incluyendo: un embrague incluyendo un rotador de lado […]