ARQUITECTURA DE POSICIONAMIENTO DINÁMICO.
Una arquitectura que comprende: un sistema de navegación inercial (6);
y un sistema de posicionamiento dinámico (1) para un buque que incorpora un medio para la combinación de unos datos suministrados por al menos uno de una pluralidad de equipamientos de medición de la posición y de unos datos suministrados por el sistema de navegación inercial (6) para deducir una estimación de la posición o de la velocidad del buque; un conjunto de conmutadores (10); y un controlador (8) del conjunto de conmutadores; en la que el conjunto de conmutadores (10) puede ser accionado bajo el control del controlador (8) del conjunto de conmutadores para suministrar los datos suministrados por al menos uno entre la pluralidad de equipamientos de medición de la posición al sistema de navegación inercial (6) a los fines de la corrección de la deriva
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08015676.
Solicitante: CONVERTEAM TECHNOLOGY LTD
IXSEA.
Nacionalidad solicitante: Reino Unido.
Dirección: BOUGHTON ROAD RUGBY WARWICKSHIRE CV21 1BU REINO UNIDO.
Inventor/es: Crétollier,François, Stephens,Richard Ian, Chamberlain,Andrew Graham.
Fecha de Publicación: .
Fecha Solicitud PCT: 5 de Septiembre de 2008.
Clasificación Internacional de Patentes:
- B63H25/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 25/00 Gobierno; Disminución de marcha utilizando medios distintos a los elementos propulsores (que emplean unidades de propulsión fueraborda instaladas de forma amovible B63H 20/00 ); Anclaje o amarre dinámico, es decir, posicionamiento de los buques por medio de elementos propulsores auxiliares o principales. › de funcionamiento automático, p. ej. sujetos a la brújula.
- B63H25/42 B63H 25/00 […] › Gobierno o anclaje dinámico por elementos propulsores (con la ayuda de chorros B63H 25/46 ); Gobierno o anclaje dinámico por hélices utilizadas únicamente con este fin; Gobierno o anclaje dinámico por timones que llevan las hélices.
- G01C21/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
- G05D1/02C
Clasificación PCT:
- B63B49/00 B63 […] › B63B BUQUES U OTRAS EMBARCACIONES FLOTANTES; EQUIPAMIENTO PARA EMBARCACIONES (disposiciones relativas a la ventilación, calefacción, refrigeración o acondicionamiento de aire en los buques B63J 2/00; subestructuras flotantes como soportes de las dragas o máquinas par el movimiento de tierras E02F 9/06). › Disposiciones de instrumentos náuticos o ayudas de navegación.
- G01C21/16 G01C 21/00 […] › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
- G05D1/02 G […] › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2362122_T3.pdf

Fragmento de la descripción:
Campo Técnico
La presente invención se refiere a una arquitectura del posicionamiento dinámico (DP) de buques marinos, esto es, al uso de propulsores para mantener la posición de un buque en las inmediaciones de un punto de referencia y estabilizar su rumbo, en oposición a las fuerzas del entorno, como por ejemplo el viento y la corriente. La arquitectura está particularmente relacionada con la forma en la que un sistema de navegación inercial (INS) puede estar integrado con el sistema de DP.
El término “buque” pretende incluir embarcaciones, plataformas de perforación y cualquier otro buque que se desplace por la superficie o a los buques a modo de plataformas o sumergibles (submarinas). La invención es principalmente válida respecto de aplicaciones en aguas profundas pero el uso en la presente memoria de la palabra “marinos” no pretende excluir su aplicación a lagos de agua dulce o a otras aguas poco profundas.
El término “sistema de navegación inercial (INS)” pretende incluir los sistemas que contienen una unidad de medición inercial (IMU), la cual es normalmente un sistema de medición de nivel bajo con un algoritmo de fusión de datos internos o externos.
El término “sistema de posicionamiento dinámico (DP)” pretende incluir otros sistemas de posicionamiento para buques, como por ejemplo los sistemas de amarre de la posición y los sistemas de amarre asistidos por propulsores, los cuales combinan aspectos de un sistema de DP con un sistema de amarre.
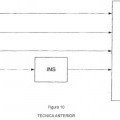
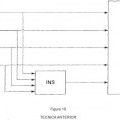
Técnica Antecedente
Un buque se desplaza en seis ejes, tres ejes traslacionales (movimiento longitudinal, lateral y vertical) y tres rotacionales (bamboleo, cabeceo y guiñada). Estos seis ejes se muestran en la Figura 1. Un sistema de DP de un buque de superficie generalmente controla solo los tres movimientos en el plano horizontal, a saber el lineal de popa
- proa, el de desviación lateral y el de guiñada, pero puede necesitar la toma en consideración de mediciones en los seis ejes.
Los componentes fundamentales de un sistema de DP son: uno o más sistemas de referencia de la posición para medir la posición del buque y su rumbo; unos propulsores para aplicar un acción de control; y un controlador para determinar los empujes requeridos. El objetivo de un sistema de DP no es mantener el buque absolutamente fijo sino mantener su posición dentro de unos límites aceptables. La magnitud de la variación de las posiciones permitidas depende de la aplicación y de los factores operativos. En muchas aplicaciones una pérdida de la posición más allá de unos límites aceptables puede tener un impacto trascendente ya sea sobre la seguridad del personal, del equipo o sobre el entorno. Es vital, por consiguiente, que se adopten las medidas adecuadas para mantener la integridad del sistema de DP hasta donde sea razonablemente posible.
El funcionamiento seguro del DP se basa en la medición en todo momento de la posición y del rumbo del buque. Con el fin de asegurar que ello se cumple, incluso en situaciones de avería, todos los sistemas de medición incluyen una redundancia. La redundancia física requiere la aplicación de un equipamiento para asegurar que un solo fallo de cualquier pieza del equipamiento no se traduzca en un fallo completo de todo el sistema y permite que se soslaye el equipamiento averiado utilizando un hardware redundante. Los sistemas redundantes paralelos deben ser independientes -- esto es, ningún modo de un solo fallo debe ser capaz de inhabilitar todo el sistema.
El sistema de DP combina todas las mediciones disponibles de la posición, cualquiera que sea la fuente de la que procedan, en una sola estimación de la posición del buque. El algoritmo para combinar las mediciones puede basarse en un filtro Kalman.
Las fuentes de medición pueden incluir una amplia variedad de equipamientos de mediciones de la posoción (PME) como por ejemplo compases giroscópicos (los cuales ofrecen una medición compacta, fiable y precisa del rumbo del buque (guiñada), independientemente de las perturbaciones externas, hilos tensos, sistemas de navegación por satélite (los cuales incluyen los sistemas de posicionamiento global (GPS) y los GPS diferenciales (DGPS)), los sistemas de navegación inercial (INS), y los sistemas de posicionamiento hidroacústico.
Un INS utiliza unas mediciones de aceleración para estimar el movimiento de un buque en un marco de referencia inercial. Sin embargo, a causa de los procesos físicos asociados con la aceleración debidos a la gravedad, sumados a la precisión y al ruido inherentes a los dispositivos mismos, siempre existe un grado de deriva en las mediciones de la posición. Esto significa que se necesitan unas actualizaciones periódicas respecto de las estimaciones del INS de la deriva. Estas actualizaciones pueden ser suministradas por otra unidad de PME, como por ejemplo un sistema de posicionamiento hidroacústico o un sistema de navegación por satélite.
El INS y los sistemas de posicionamiento hidroacústico
Los problemas de la acústica en aguas profundas son bien conocidos (Stephens, R.I. “Aspectos del posicionamiento dinámico industrial: control tolerante con la realidad” [“Aspects of industrial dynamic positioning: reality-tolerant control”], IFAC Conference on Control Applications in Marine Systems, CAMS 2004, 7 a 9 de Julio de 2004, Ancona, Italia, pp. 41 a 51). La profundidad introduce unos tiempos largos de los ciclos de los pulsos magnéticos (“ping”) debido a la distancia para que el sonido se desplace, a menos que se emplee el llamado “apilamiento” de los pulsos magnéticos (“pings stacking”). Las aguas profundas aumentan, así mismo, el coste de sustitución de las pilas de los transceptores, lo que comienza a representar una proporción considerable del coste global del sistema de posicionamiento hidroacústico. Mediante el incremento de los tiempos de los ciclos de los pulsos magnéticos puede extenderse la duración de las pilas. El apilamiento de los pulsos magnéticos solo sirve para reducir la duración de las pilas. Por desgracia, el incremento de los tiempos de los pulsos magnéticos puede afectar negativamente al control del DP. Esto es cierto aun cuando se pueda configurar directamente el controlador del filtro Kalman de DP para hacer uso de unas tasas de actualización de mediciones largas. Ello tiende a provocar un uso de la propulsión más elevado en cuanto el sistema de DP detecta más tarde unas desviaciones y tiene que aplicar unos ajustes mayores en la propulsión. Cualquier cambio en las fuerzas medioambientales o pequeñas incongruencias en el modelo del buque del sistema de DP resultan exacerbados por un tiempo largo de los pulsos magnéticos. Existe, así mismo, la posibilidad de que se produzcan efectos distorsionantes debido a que unos largos periodos de medición de la posición producirán un ruido incrementado en las posiciones de la medición.
La integración de un INS en el sistema de posicionamiento hidroacústico puede posibilitar que sean introducidos largos tiempos de los pulsos magnéticos mediante la utilización del INS para su relleno entre los pulsos magnéticos.
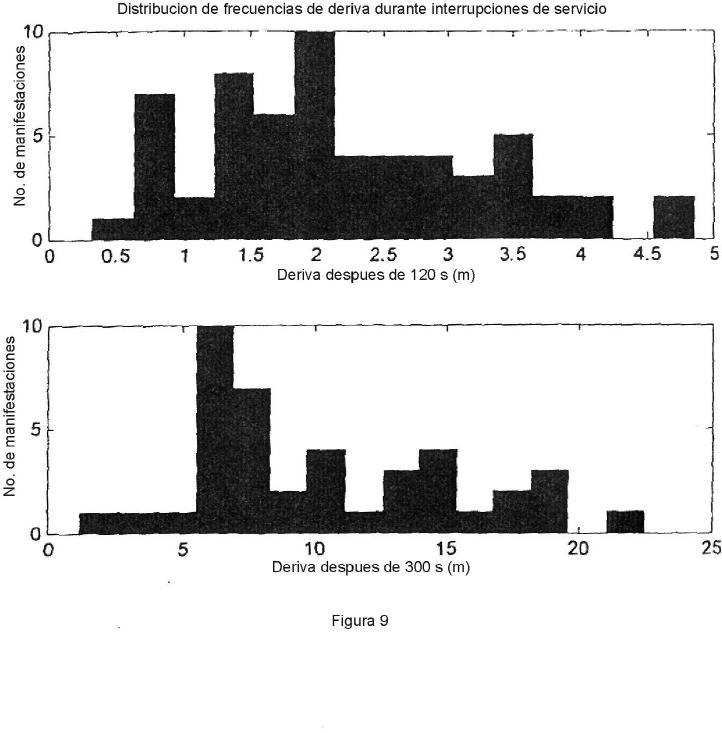
Con el fin de investigar los beneficios de esta propuesta, se han llevado a cabo una serie de pruebas sobre dos pequeños buques utilizando un sistema de posicionamiento hidroacústico, combinado con un sensor inercial PHINS (siendo ambos productos suministrados por IXSEA de la Avenue Auguste Rendor, 55, 78160 Marly le Roi, Francia). Las pruebas se llevaron a cabo en el modo de línea de base ultracorta (USBL) a una profundidad del agua de 15 m en la costa de Brest (Francia) y a una profundidad del agua de 1000 m en la costa de La Ciotat (Francia). En aguas profundas, el tiempo más corto del ciclo del pulso magnético, sin apilamiento de los pulsos magnéticos, fue de 3 s; por consiguiente, los datos fueron recogidos a esa velocidad. Tanto los datos acústicos en bruto como las posiciones corregidas con el PHINS fueron registrados. Una señal adicional fue generada por el PHINS utilizando unas mediciones acústicas muestreadas cada 21 s y no cada 3 s.
Aunque no fue posible instalar un sistema de DP en el buque a la escala de tiempos de las pruebas, los resultados han sido post-procesados utilizando una simulación del sistema de DP para estimar el comportamiento de un buque controlado por un sistema de DP bajo las mismas condiciones. Los errores medidos mediante las pruebas del INS fueron aplicados en la simulación y en las comparaciones... [Seguir leyendo]
Reivindicaciones:
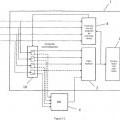
1. Una arquitectura que comprende:
un sistema de navegación inercial (6); y un sistema de posicionamiento dinámico (1) para un buque que incorpora un medio para la combinación de unos datos suministrados por al menos uno de una pluralidad de equipamientos de medición de la posición y de unos datos suministrados por el sistema de navegación inercial (6) para deducir una estimación de la posición o de la velocidad del buque; un conjunto de conmutadores (10); y un controlador (8) del conjunto de conmutadores; en la que el conjunto de conmutadores (10) puede ser accionado bajo el control del controlador (8) del conjunto de conmutadores para suministrar los datos suministrados por al menos uno entre la pluralidad de equipamientos de medición de la posición al sistema de navegación inercial (6) a los fines de la corrección de la deriva.
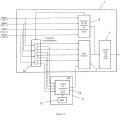
2. Arquitectura de acuerdo con la reivindicación 1, en la que el controlador (8) del conjunto de conmutadores utiliza unos datos suministrados por la pluralidad de equipamientos de medición de la posición para accionar de manera automática el conjunto de conmutadores (10).
3. Arquitectura de acuerdo con la reivindicación 2, en la que el controlador (8) del conjunto de conmutadores utiliza también la estimación de la posición o la velocidad del buque deducida por el medio para la combinación de los datos y / o los datos suministrados por el sistema de navegación inercial para accionar de manera automática el conjunto de conmutadores (10).
4. Arquitectura de acuerdo con la reivindicación 1, en la que el controlador (8) del conjunto de conmutadores, acciona el conjunto de conmutadores (10) de acuerdo con un comando de operador.
5. Arquitectura de acuerdo con una cualquier reivindicación precedente, en la que el conjunto de conmutadores (10) y el controlador (8) del conjunto de conmutadores son incorporados como parte del sistema de posicionamiento dinámico (1).
6. Arquitectura de acuerdo con cualquiera de las reivindicaciones 1 a 4, en la que el conjunto de conmutadores y el controlador del conjunto de conmutadores se incorporan como parte del sistema de navegación inercial.
7. Arquitectura de acuerdo con cualquiera de las reivindicaciones 1 a 4, en la que el conjunto de conmutadores y el controlador del conjunto de conmutadores son parte de una unidad de conmutación independiente.
8. Arquitectura de acuerdo con cualquier reivindicación precedente, en la que el sistema de navegación inercial (6) se incorpora como parte del sistema de posicionamiento dinámico (1).
9. Arquitectura de acuerdo con cualquier reivindicación precedente, en la que el medio para combinar los datos es un filtro Kalman (2).
Patentes similares o relacionadas:
Generación de estimación de la gravedad de la Tierra, del 3 de Junio de 2020, de Helsingin Yliopisto: Un procedimiento para generar estimaciones de la gravedad de la Tierra para períodos de tiempo secuenciales, en el que el procedimiento, llevado a cabo por un aparato , […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Método y sistema de navegación inercial asistido por GPS, del 18 de Marzo de 2020, de IMI Systems Ltd: Un método de navegación inercial asistido por GPS que comprende: proporcionar múltiples sensores que incluyen múltiples unidades de medición de inercia (IMU) y al menos […]
Dispositivo y procedimiento de mantenimiento de actitud de un portador que utiliza girómetros, del 18 de Marzo de 2020, de Safran Electronics & Defense: Dispositivo de mantenimiento de actitud de un portador, comprendiendo el dispositivo: · tres girómetros primarios dispuestos […]
 Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Localización dentro de un entorno usando fusión de sensores, del 4 de Diciembre de 2019, de THE BOEING COMPANY: Un aparato que comprende: una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos […]
Procedimiento de gestión automática de un girómetro longitudinal montado en un aparato volador, del 20 de Noviembre de 2019, de MBDA FRANCE: Procedimiento de gestión automática de un girómetro longitudinal que está montado sobre un misil aéreo, susceptible de ser puesto en rotación, procedimiento […]
Ayudas de navegación para sistemas aéreos no tripulados en un entorno sin GPS, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Método para estimar una posición o trayectoria de una aeronave en un entorno sin GPS que comprende: obtener, mediante un sistema de navegación inercial, una […]