Procedimiento de estimación del movimiento de un peatón.
Procedimiento de estimación del movimiento de un peatón (1) en marcha que comprende las etapas de:
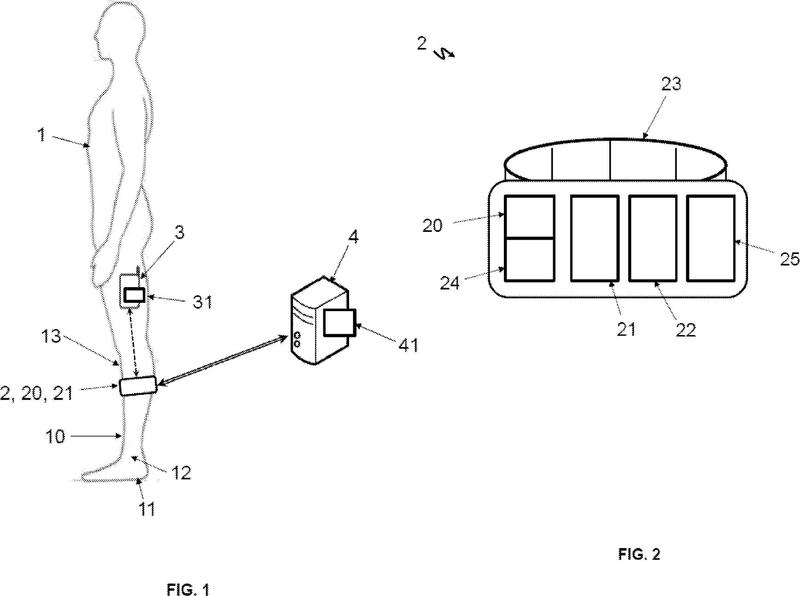
(a) medir una aceleración y una velocidad angular de una extremidad inferior (10) por unos medios de medición inercial (20) solidarios con dicha extremidad inferior (10) de dicho peatón (1) y dispuestos de manera que presenten sustancialmente un movimiento de rotación con respecto a un extremo distal (11) de dicha extremidad inferior (10) por lo menos cuando dicho extremo distal (11) de la extremidad inferior (10) está en contacto con el suelo;
(b) estimar por unos medios de tratamiento de datos (21, 31, 41) una velocidad de dicha extremidad inferior (10) en función de dicha aceleración y de dicha velocidad angular medidas;
(c) determinar por los medios de tratamiento de datos (21, 31, 41) un intervalo temporal de dicha marcha del peatón (1) durante el cual dicho extremo distal (11) de dicha extremidad inferior (10) está en contacto con el suelo en función de la aceleración medida, de la velocidad angular medida, y de un brazo de palanca entre los medios de medición inercial (20) y dicho extremo distal (11);
(d) en dicho intervalo temporal determinado:
- calcular por los medios de tratamiento de datos (21, 31, 41) una velocidad esperada de dicha extremidad inferior (10) en función de dicha velocidad angular medida y de dicho brazo de palanca;
- corregir la velocidad estimada de dicha extremidad inferior (10) en función de la velocidad esperada;
(e) estimar por los medios de tratamiento de datos (21, 31, 41) el movimiento del peatón (1) en función de la velocidad corregida de dicha extremidad inferior (10).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2016/052619.
Solicitante: SYSNAV.
Nacionalidad solicitante: Francia.
Dirección: 57, rue de Montigny 27200 Vernon FRANCIA.
Inventor/es: VISSIERE,DAVID, HILLION,MATHIEU, DORVEAUX,ERIC, JOUY,AUGUSTIN, GRELET,MARC.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/12 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › ejecutadas a bordo del objeto que se hace navegar; Navegación a estima.
- G01C21/16 G01C 21/00 […] › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
- G01C21/20 G01C 21/00 […] › Instrumentos para efectuar cálculos de navegación (G01C 21/24, G01C 21/26 tienen preferencia).
- G01C22/00 G01C […] › Medida de la distancia recorrida sobre el suelo por vehículos, personas, animales u otros cuerpos sólidos en movimiento, p. ej. utilizando odómetros o usando podómetros.
PDF original: ES-2779764_T3.pdf

Patentes similares o relacionadas:
Generación de estimación de la gravedad de la Tierra, del 3 de Junio de 2020, de Helsingin Yliopisto: Un procedimiento para generar estimaciones de la gravedad de la Tierra para períodos de tiempo secuenciales, en el que el procedimiento, llevado a cabo por un aparato , […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Método y sistema de navegación inercial asistido por GPS, del 18 de Marzo de 2020, de IMI Systems Ltd: Un método de navegación inercial asistido por GPS que comprende: proporcionar múltiples sensores que incluyen múltiples unidades de medición de inercia (IMU) y al menos […]
Dispositivo y procedimiento de mantenimiento de actitud de un portador que utiliza girómetros, del 18 de Marzo de 2020, de Safran Electronics & Defense: Dispositivo de mantenimiento de actitud de un portador, comprendiendo el dispositivo: · tres girómetros primarios dispuestos […]
Localización dentro de un entorno usando fusión de sensores, del 4 de Diciembre de 2019, de THE BOEING COMPANY: Un aparato que comprende: una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos […]
Procedimiento de gestión automática de un girómetro longitudinal montado en un aparato volador, del 20 de Noviembre de 2019, de MBDA FRANCE: Procedimiento de gestión automática de un girómetro longitudinal que está montado sobre un misil aéreo, susceptible de ser puesto en rotación, procedimiento […]
Ayudas de navegación para sistemas aéreos no tripulados en un entorno sin GPS, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Método para estimar una posición o trayectoria de una aeronave en un entorno sin GPS que comprende: obtener, mediante un sistema de navegación inercial, una […]
PROCEDIMIENTO DE CONTROL FUNCIONAL DE UNA CENTRAL INERCIAL DE UN MÓVIL, del 14 de Diciembre de 2011, de MBDA FRANCE: Procedimiento de control funcional de una central inercial de un móvil, embarcada en un simulador de movimiento y que facilita, en tiempo real, datos inerciales de medición […]