DISPOSITIVO ADICIONAL DE CONTROL PARA MAQUINA CON CONTROL NUMERICO.
Dispositivo adicional de control para máquina con control numérico.
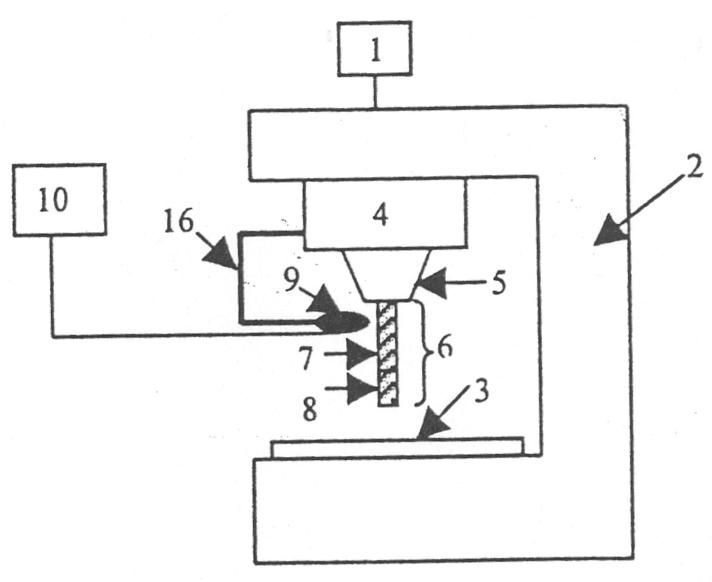
#El dispositivo adicional de control tiene sujeto al cabezal a través de un elemento de conexión mecánica un componente para medir la distancia radial relativa al cabezal, tanto en el portaherramienta como en la parte cilíndrica. El dispositivo tiene un componente para la protección, cubre el componente para medir la distancia, el elemento de conexión mecánica y como mínimo, parcialmente el área de medida. El dispositivo tiene un módulo de elementos electrónicos para el cálculo de resultados relativos a las mediciones. El control numérico tiene conexión eléctrica con el módulo de elementos electrónicos.
Tipo: Resumen de patente/invención.
Solicitante: CONSEJO SUPERIOR INVESTIG. CIENTIFICAS.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: AKINFIEV,TEODOR, ARMADA RODRIGUEZ,MANUEL ANGEL, ROS TORRECILLAS,SALVADOR, RAMIREZ ROJAS,ADRIANA C, ALIQUE LOPEZ,JOSE MANUEL.
Fecha de Solicitud: 26 de Abril de 2005.
Fecha de Publicación: .
Fecha de Concesión: 31 de Marzo de 2008.
Clasificación Internacional de Patentes:
- B23Q15/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 15/00 Control automático o regulación del movimiento de avance, de la velocidad de corte o de la posición tanto de la herramienta como de la pieza. › Control o regulación de la posición de la herramienta o de la pieza.
- B23Q17/24 B23Q […] › B23Q 17/00 Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00). › utilizando medios ópticos.
- G05B19/18 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control numérico (NC), es decir, máquinas que funcionan automáticamente, en particular máquinas herramientas, p. ej. en un entorno de fabricación industrial, para efectuar un posicionamiento, un movimiento o acciones coordinadas por medio de datos de un programa en forma numérica (G05B 19/418 tiene prioridad).
Clasificación PCT:
- B23Q15/22 B23Q 15/00 […] › Control o regulación de la posición de la herramienta o de la pieza.
- B23Q17/24 B23Q 17/00 […] › utilizando medios ópticos.
- G05B19/18 G05B 19/00 […] › Control numérico (NC), es decir, máquinas que funcionan automáticamente, en particular máquinas herramientas, p. ej. en un entorno de fabricación industrial, para efectuar un posicionamiento, un movimiento o acciones coordinadas por medio de datos de un programa en forma numérica (G05B 19/418 tiene prioridad).
Patentes similares o relacionadas:
Dispositivo de mandril y método, del 18 de Marzo de 2020, de In-Situ Oilfield Services Limited: Un dispositivo de mandril que tiene al menos dos mandíbulas para agarrar un objeto (T), y un mecanismo de ajuste configurado para ajustar el centro rotacional […]
Dispositivo de biopsia con elemento de corte interior, del 15 de Enero de 2020, de SENORX, INC.: Sonda para un dispositivo de biopsia de tejido para acceder a y recoger una muestra de tejido de un sitio diana dentro de un paciente que comprende: […]
Método para mecanizado e inspección de piezas de trabajo, del 13 de Noviembre de 2019, de Agie Charmilles SA: Método para mecanizado de piezas de trabajo e inspección de una superficie de pieza de trabajo procesada en una máquina herramienta , comprendiendo el método […]
Módulo de mecanización, conjunto de accesorio para módulo de mecanización, y procedimiento de puesta en marcha de un módulo de mecanización, del 9 de Octubre de 2019, de Watch Out SA: Conjunto de accesorios para módulo de mecanización por arrancado de virutas, que comprende: por lo menos un portaherramientas provisto de una […]
Procedimiento y dispositivo para detectar y corregir una ubicación espacial de una pieza de trabajo sostenida en un dispositivo de posicionamiento, del 4 de Septiembre de 2019, de JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH: Procedimiento para detectar y corregir una ubicación espacial de una pieza de trabajo no simétrica en rotación sostenida en un dispositivo de posicionamiento […]
Procedimiento y dispositivo de control para equipo de motor, del 7 de Agosto de 2019, de PELLENC: Dispositivo de control para un equipo de motor, que comprende al menos un sensor y una tarjeta electrónica de control del equipo en función de […]
Aparato para el remachado, del 7 de Agosto de 2019, de COMAU S.P.A.: Aparato para aplicar remaches en una parte (π) de una superficie plana de una pieza (P), en el que dicha parte (π) de la superficie plana define un eje operativo […]
Sistema robótico autónomo supervisado para inspección y procesamiento de superficie compleja, del 24 de Abril de 2019, de CARNEGIE MELLON UNIVERSITY: Un sistema para realizar procesamiento de superficie en un objeto tridimensional en un entorno de trabajo que comprende: una base estacionaria […]