DISPOSITIVO Y PROCEDIMIENTO UTIL PARA EL CONTROL DE UN AUTOMOVIL, CONAYUDA DE GPS Y COMUNICACIONES INALAMBRICAS, QUE PERMITE EFECTUAR ADELANTAMIENTOS.
Dispositivo y procedimiento útil para el control de un automóvil,
con ayuda de GPS y comunicaciones inalámbricas, que permite efectuar adelantamientos.El dispositivo y procedimiento permite el control automático para realizar mediante un computador maniobras de adelantamiento en carretera, manejando los tres actuadores principales del vehículo, acelerador, freno y dirección sin intervención humana, basándose en información sensorial proveniente de sistemas GNSS, redes de comunicaciones inalámbricas Wi.Fi y la información de navegación del propio vehículo. La computación de control del sistema esta basada en algoritmos de lógica borrosa desarrollados por los autores
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P200700687.
Solicitante: CONSEJO SUPERIOR INVESTIG. CIENTIFICAS.
Nacionalidad solicitante: España.
Provincia: MADRID.
Inventor/es: GONZALEZ FERNANDEZ-VALLEJO,CARLOS, EUGENIO NARANJO,JOSE, GARCIA ROSA,RICARDO, PEDRO LUCIO,TERESA DE.
Fecha de Solicitud: 15 de Marzo de 2007.
Fecha de Publicación: .
Fecha de Concesión: 17 de Noviembre de 2010.
Clasificación Internacional de Patentes:
- B60K31/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › Accesorios actuantes únicamente sobre una sola subunidad, para el control automático de la velocidad, p.ej. prevenir que la velocidad sobrepase un valor determinado o mantener una velocidad particular, seleccionada por el conductor del vehículo (accesorios actuantes sobre dos o más subunidades B60W 30/14; control del conjunto de propulsión en sí ver las clases o subclases apropiadas, p. ej. F02D; indicadores de velocidad G01P; sistemas o dispositivos para controlar la velocidad en general G05D 13/00).
Clasificación PCT:
- B60K31/00 B60K […] › Accesorios actuantes únicamente sobre una sola subunidad, para el control automático de la velocidad, p.ej. prevenir que la velocidad sobrepase un valor determinado o mantener una velocidad particular, seleccionada por el conductor del vehículo (accesorios actuantes sobre dos o más subunidades B60W 30/14; control del conjunto de propulsión en sí ver las clases o subclases apropiadas, p. ej. F02D; indicadores de velocidad G01P; sistemas o dispositivos para controlar la velocidad en general G05D 13/00).
Fragmento de la descripción:
Dispositivo y procedimiento útil para el control de un automóvil, con ayuda de GPS y comunicaciones inalámbricas, que permite efectuar adelantamientos.
Sector de la técnica
Dispositivo incorporado a vehículos a motor que se encuadra en el sector de la ingeniería del automóvil. Se trata de una herramienta diseñada para proporcionar un sistema integrado al vehículo que permite ayudar al conductor en la toma de decisiones y en la realización con toda seguridad de acciones relacionadas con los procesos de adelantamiento a otros vehículos.
Estado de la técnica
El número de accidentes de tráfico y accidentes mortales que se sufren en la carretera han venido estimulando, tanto por parte de los gobiernos como de los fabricantes de automóviles, la búsqueda de soluciones para reducir tanto los unos como las otras. Entre 1995 y 2000, solo en Estados Unidos, se produjeron 3841 accidentes durante el transcurso de maniobras de adelantamiento, con un balance de 13.012 personas fallecidas (Fatality Analysis Reporting System, National Center,for Statistics & Analysis, US DOT). Continuamente, los gobiernos están llevando a cabo acciones a fin de reducir esta gran siniestralidad. Quizá una de las más radicales se ha dado en Holanda, donde se ha prohibido el adelantamiento en carreteras con un carril en cada sentido, con la consecuente molestia para los conductores [G. Hegeman, Overtaking Frequency and Advanced Driver Assistance Systems, IEEE Intelligent Vehicles Symposium, University of Parma, Parma, Italy, pp. 145-149, 2004]. Evitar este tipo de planteamiento tan tajante es el objetivo de la investigación en sistemas de ayuda a la conducción, a fin de aumentar la seguridad de esta maniobra, para mejorar lo más posible el confort de la conducción.
Uno de los caminos elegidos para conseguir este objetivo es la introducción dentro de los vehículos de ayudas a la conducción que informen al conductor de situaciones que pudieran haber escapado a su conocimiento, o que controlen determinados aspectos puntuales de la conducción, con el fin aumentar las herramientas de ayuda a la conducción, así como reducir el número de elementos que requieren la atención simultánea y continuada del conductor.
La maniobra de cambio de carril es, sin duda, una de las más estudiadas en Sistemas Inteligentes de Transporte (Intelligent Transport Systems, ITS), después del seguimiento de trayectorias. Se emplea como operación elemental para llevar a cabo otras maniobras más complejas, como puede ser el cambiar de carril en una autopista, tomar un desvío o adelantar a otro vehículo u obstáculo.
Así, en el programa de California PATH (Partners for Advanced Transit and Highways), utilizan esta maniobra de cambio de carril para incorporar de forma automática el vehículo autónomo a una caravana de vehículos que circulan por un carril diferente. En [R. Rajamani et al., Demonstration of integrated Longitudinal and Lateral Control for the Operation of Automated Vehicles in Platoons, IEEE Transactions on Control Systems Technology, Vol. 8, No. 4, July 2000, pp. 695-708] se describe un control lateral cuya finalidad es el mantenimiento del carril y el cambio a otro cuando es necesario, siempre manteniendo la misma dirección. Esta acción se realiza definiendo una trayectoria estimada de cambio de carril y siguiéndola sólo con sensores locales, ya que, en el transvase de un carril a otro, se deja de recibir realimentación de los sensores magnéticos localizados en el suelo de la carretera. Se contemplan tres fases en esta operación: abandono del carril, aproximación al nuevo carril y seguimiento del nuevo carril. Las variables de entrada al sistema de control analítico clásico son los errores laterales y angulares respecto del centro del carril, que es donde se localizan los marcadores.
La forma de calcular esta trayectoria para llevar a cabo el cambio de carril se puede encontrar más detallada en [H. Jula, E.B. Kosmatopoulos, P. Ioannou, Collision Avoidance Analysis for Lane Changing and Merging, IEEE Transactions on Vehicular Technology, vol. 49, no. 6, November 2000, pp. 2295-2308.], donde se hace un análisis exhaustivo. Define, además, las cuatro situaciones en las que es seguro o inseguro llevar a cabo un cambio de carril. Considerando que el vehículo 1 es el que realiza la maniobra y el vehículo 2 el que circula en el carril vecino, se tiene:
- ○ Caso I: la velocidad del vehículo 1 es menor que la de otro e intenta realizar un cambio de carril sin modificar esta velocidad, realizando un seguimiento del vehículo 2.
- ○ Caso II: el vehículo 1 circula más lento que el 2 y realiza el cambio de carril con una aceleración constante para colocarse delante de él.
- ○ Caso III: el vehículo 1 circula más rápido que el 2 y realiza el cambio de carril a velocidad constante para colocarse delante de él.
- ○ Caso IV: la velocidad del vehículo 1 es mayor que la del 2 y realiza el cambio de carril con una deceleración constante para colocarse detrás de él.
Los propios inventores han llevado a cabo experimentación sobre maniobras de cambio de carril, centrada, sobre todo, en lo referente a completar operaciones de adelantamiento de otro vehículo en carreteras de doble sentido, aunque también seria extensible a autopistas con algunas modificaciones. De esta manera, en [R. García, T. de Pedro, J.E. Naranjo, J. Reviejo, C. González, Frontal and Lateral Control for Unmanned Vehicles in Urban Tracks, IEEE Intelligent Vehicles Symposium, Versailles, France, 2002] se describen las reglas borrosas con capacidad para llevar a cabo adelantamientos de objetos estáticos y en su extensión, para poder llevar a cabo adelantamiento de objetos en movimiento, como por ejemplo otros vehículos. [J.E. Naranjo, C. González, R. García, T. de Pedro, R.E. Haber, Power-Steering Control Architecture for Automatic Driving, IEEE Transactions on Intelligent Transportation Systems, vol. 6, no. 4, December 2005, pp. 406-415., J.E. Naranjo, C. González, R. García, T. de Pedro, ACC+Stop&Go Maneuvers With Throttle and Brake Fuzzy Control, IEEE Transactions on Intelligent Transportation Systems, vol. 7, no. 2, June 2006, pp. 213-225].
Sin embargo, una vez probados con éxito los controladores desarrollados para adelantar obstáculos fijos, se debe proceder a una segunda fase de resolución de problemas, como es el adelantamiento de obstáculos móviles o, lo que es lo mismo, adelantar a otro vehículo que circula por nuestro carril.
Descripción de la invención
El sistema objeto de las reivindicaciones permite el control automático para realizar mediante un computador maniobras de adelantamiento en carretera, manejando los tres actuadores principales del vehículo, acelerador, freno y dirección, sin intervención humana, basándose en información sensorial proveniente de sistemas GNSS, redes de comunicaciones inalámbricas Wi.Fi y la información de navegación del propio vehículo. La computación de control del sistema esta basada en algoritmos de lógica borrosa desarrollados por los autores.
La presente invención se enfrenta al problema de proporcionar nuevos dispositivos o mecanismos de ayuda a los conductores para la información y regulación o control automático de vehículos a motor, y más particularmente para el adelantamiento de vehículos.
El objeto que se propone es un dispositivo o aparato que permite el control automático de un automóvil como ayuda a un conductor, preferentemente, que permita efectuar adelantamientos. El dispositivo presentado en la invención utiliza el localizador (Global Positioning System) GPS o Sistema de Posicionamiento Global (su nombre más correcto es NAVSTAR GPS), que es un Sistema Global de Navegación por Satélite (GNSS), el cual permite determinar en todo el mundo la posición de un objeto, una persona, un vehículo o una nave, con una precisión hasta de centímetros usando GPS diferencial, aunque lo habitual es que esta precisión sea de unos pocos metros. El GPS fue desarrollado, instalado y actualmente es utilizado por el Departamento de Defensa de los Estados Unidos.
El dispositivo de la invención utiliza esta información obtenida del sistema GPS para realizar el control de posición de un vehículo equipado con dicho dispositivo y mantenerlo en su trayectoria. Además del GPS,...
Reivindicaciones:
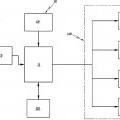
1. Dispositivo útil para el control del adelantamiento de un vehículo que comprende los elementos siguientes:
(i) Sistema GPS de recepción de datos,
(ii) elemento de comunicación de red inalámbrica ethernet según estándares IEEE 802.11x,
(iii) sistema de comunicación con el bus del vehículo para lectura de datos de éste, en particular, la velocidad,
(iv) unidad de salida de datos, analógica para controlar los actuadores del volante,
(v) unidad de salida de datos, analógica para controlar el actuador de la aceleración,
(vi) unidad de salida de datos, analógica para controlar el actuador del freno, y
(vii) unidad de proceso (computador) responsable de la toma de decisiones automática del procedimiento de la invención y las tareas de control de todos los dispositivos digitales y analógicos que dependen del sistema, como son las unidades de señalización de inicio y final de maniobra de los indicadores luminosos del vehículo. Esta unidad se encarga de activar los controles del volante para cambiar de carril cuando a partir de los datos que tiene y le llegan por red calcula que la velocidad propia el mayor que la del vehículo precedenty y que se cumple la condición de la ecuación 1.
2. Procedimiento útil para el control automático de adelantamientos de un automóvil caracterizado porque se emplea GPS y comunicaciones inalámbricas como principal fuente sensorial y la lógica borrosa como método de control del sistema, y porque comprende las siguientes etapas:
- a) Obtención y análisis de los datos del GPS propio como la posición del vehículo equipado y localizando dicha posición en la trayectoria de viaje definida inicialmente,
- b) Identificación de las posibilidades de adelantamiento mediante el análisis de las características del camino,
- c) Obtención y análisis de los datos recibidos por la red inalámbrica tipo ethernet para determinar la posición y la distancia entre el vehículo equipado y el/los vehículo/s precedente/s más próximos con los que se debe interactuar o entrar en conflicto,
- d) Obtención de la velocidad del vehículo equipado a partir de las informaciones de su bus CAN de datos,
- e) Aplicación mediante un programa de los algoritmos desarrollados con los datos precedentes para identificar las situaciones:


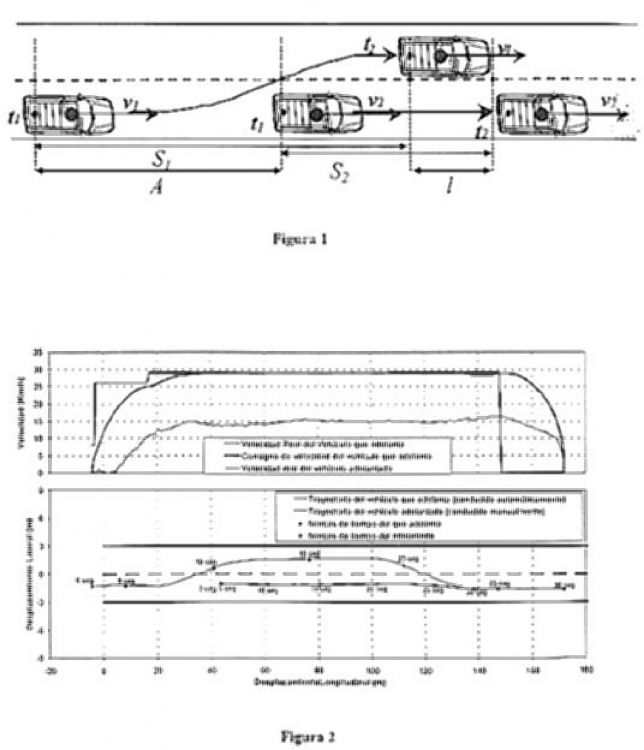
- f) Iniciar el adelantamiento manteniendo la velocidad, mientras se acerca al vehículo precedente hasta alcanzar la distancia estimada de inicio del adelantamiento, calculada según la ecuación 1,
- g) una vez que se llega a la distancia calculada por la ecuación 1, momento en que debe iniciarse el adelantamiento actuar sobre el control que hace girar el volante a la izquierda y los sistemas de señalización. el giro a la izquierda del volante se mantiene hasta que el GPS nos indica que estamos en el carril adyacente. De este modo que se realiza un primer cambio de carril al carril izquierdo para así poder rebasar al vehículo precedente.
- h) Continuar por el carril adyacente hasta que las comunicaciones inalámbricas nos permiten detectar que se ha rebasado el vehículo completamente,
- i) actuar sobre actuar sobre el control que hace girar el volante a la derecha y los sistemas de señalización para imprimir al volante un giro a la derecha hasta que el GPS indica que se ha vuelto al carril original con el fin de terminar el adelantamiento, y
- j) continuar circulando normalmente.
3. Uso del dispositivo y el procedimiento según las reivindicaciones 1 y 2 para el control automático de maniobras de adelantamiento de un vehículo en carretera, ya sea de forma independiente o integrado en sistemas con otras aplicaciones complementarias de la conducción.
Patentes similares o relacionadas:
SISTEMA DE MEJORA DE MODO DE CONDUCCIÓN CRUCERO CON INCLUSIÓN DE RUTAS CON TRAYECTOS CURVOS BASADO EN AJUSTES DE VELOCIDAD AUTOMÁTICOS, del 27 de Junio de 2019, de KITAZAWA MOLINA, Elvia Isabel: La presente invención describe un sistema de integración en vehiculos y un método de operación de los mismos que permite cambios de comportamiento en éste para posibilitar […]
Vehículo que comprende un conjunto de rueda, del 23 de Octubre de 2018, de Nissan Motor Manufacturing (UK) Ltd: Vehículo que incluye un sistema de control del vehículo; un controlador ; y al menos un conjunto de rueda; dicho conjunto de rueda incluye […]
Procedimiento y sistema para controlar una distancia de conducción, del 22 de Junio de 2016, de VOLVO LASTVAGNAR AB: Un procedimiento para controlar una distancia de conducción entre un vehículo anfitrión (H) y un primer vehículo (A) que conduce por delante de dicho […]
Método, control y sistema para controlar un pedal de realimentación de fuerza de acelerador (AFFP) como sistema de asistencia para control de distancia o velocidad en el tráfico por carretera, del 11 de Mayo de 2016, de CONTI TEMIC MICROELECTRONIC GMBH: Procedimiento para la regulación de la fuerza de recuperación de una unidad de control de automóviles, en el que en la unidad de control se trata de un pedal de acelerador o de […]
 Dispositivo para la generación de una alarma en respuesta a la velocidad de un vehículo, del 24 de Noviembre de 2015, de CF3000 - S.R.L: Aparato para la generación de una señal de alarma para el conductor de un vehículo en relación con una velocidad real del vehículo, que comprende
a. un […]
Dispositivo para la generación de una alarma en respuesta a la velocidad de un vehículo, del 24 de Noviembre de 2015, de CF3000 - S.R.L: Aparato para la generación de una señal de alarma para el conductor de un vehículo en relación con una velocidad real del vehículo, que comprende
a. un […]
 Procedimiento y sistema para controlar un control de crucero de un vehículo, del 17 de Diciembre de 2014, de VOLVO LASTVAGNAR AB: Procedimiento para controlar un control de crucero de un vehículo que comprende las etapas de:
• conducir dicho vehículo con dicho control de crucero […]
Procedimiento y sistema para controlar un control de crucero de un vehículo, del 17 de Diciembre de 2014, de VOLVO LASTVAGNAR AB: Procedimiento para controlar un control de crucero de un vehículo que comprende las etapas de:
• conducir dicho vehículo con dicho control de crucero […]
Procedimiento de gestión de un sistema de ayuda a la conducción acoplado a un sistema de ayuda al frenado de un vehículo automóvil enfrentado a un riesgo de colisión, del 5 de Noviembre de 2014, de PEUGEOT CITROEN AUTOMOBILES SA: Procedimiento de gestión de un sistema de ayuda a la conducción y de un sistema de ayuda al frenado de un vehículo automóvil, comprendiendo el citado sistema de ayuda a […]
 Dispositivo de control de crucero para una motocicleta, del 30 de Julio de 2014, de SUZUKI MOTOR CORPORATION: Un dispositivo de control de crucero para una motocicleta incluyendo un sistema de control electrónico de válvula de mariposa, incluyendo el dispositivo […]
Dispositivo de control de crucero para una motocicleta, del 30 de Julio de 2014, de SUZUKI MOTOR CORPORATION: Un dispositivo de control de crucero para una motocicleta incluyendo un sistema de control electrónico de válvula de mariposa, incluyendo el dispositivo […]