CIP-2021 : A61B 34/20 : Sistemas de navegación quirúrgica; Dispositivos para el seguimiento o guía de instrumentos quirúrgicos,
p. ej. para neuronavegadores o técnicas estereotáxicas sin marco o guías estereotáxicas ("frameless stereotaxis").
CIP-2021 › A › A61 › A61B › A61B 34/00 › A61B 34/20[1] › Sistemas de navegación quirúrgica; Dispositivos para el seguimiento o guía de instrumentos quirúrgicos, p. ej. para neuronavegadores o técnicas estereotáxicas sin marco o guías estereotáxicas ("frameless stereotaxis").
Notas[t] desde A61 hasta A63: SALUD; SALVAMENTO; DIVERSIONES
A NECESIDADES CORRIENTES DE LA VIDA.
A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE.
A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48).
A61B 34/00 Cirugía asistida por ordenador; Operadores o robots adaptados de forma especial para su uso en cirugía.
A61B 34/20 · Sistemas de navegación quirúrgica; Dispositivos para el seguimiento o guía de instrumentos quirúrgicos, p. ej. para neuronavegadores o técnicas estereotáxicas sin marco o guías estereotáxicas ("frameless stereotaxis").
CIP2021: Invenciones publicadas en esta sección.
Sistema de navegación, seguimiento y guía para el posicionamiento de instrumentos quirúrgicos dentro del cuerpo de un paciente.
(03/06/2020) Sistema de navegación, seguimiento y guiado para el posicionamiento de instrumentos quirúrgicos dentro del cuerpo de un paciente (P) que comprende:
- una unidad de control configurada para recibir una pluralidad de información relacionada con el estado interno del cuerpo de un paciente (P),
- un visor configurado de tal manera que un operador pueda ver al menos una porción interna (Pi) del cuerpo del paciente (P) a través de dicho visor ,
- primeros medios de detección para la determinación de la posición espacial de dicho visor ;
estando configurada dicha unidad de control para controlar una proyección en dicho visor de una imagen del estado interno de dicha al menos una porción interna (Pi) del cuerpo del paciente (P), obteniéndose dicha imagen procesando dicha pluralidad…
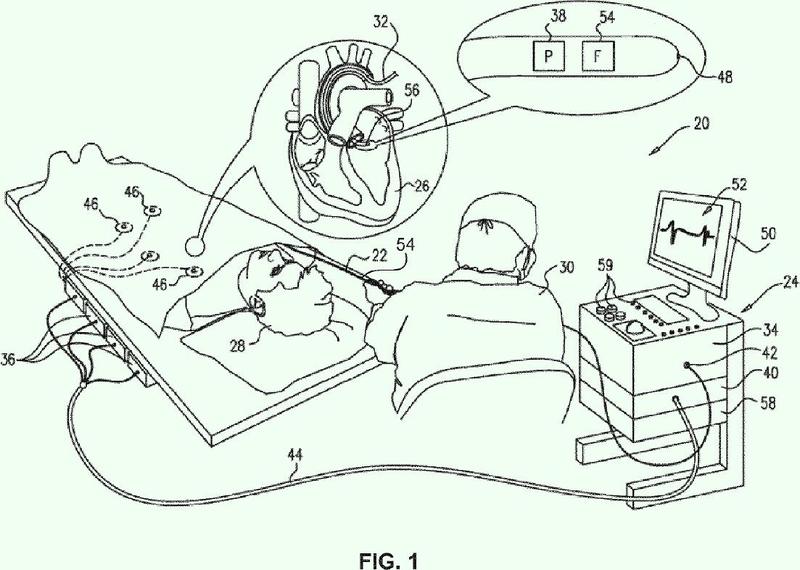
Registro de imagen de catéter del seno coronario.
(13/05/2020) Un aparato que comprende:
un catéter cardíaco adaptado para su introducción en un seno coronario de un corazón de un sujeto vivo;
una pantalla ;
un dispositivo de imagenología fluoroscópica ; y
un procesador , que coopera con el dispositivo de imagenología fluoroscópica y está configurado para realizar los pasos de:
importar datos de imágenes del corazón obtenidas antes de la introducción del catéter cardíaco; representar los datos de la imagen como un primer modelo del corazón en un primer espacio de coordenadas, el primer modelo comprendiendo el seno coronario ;
posteriormente adquirir unos primeros datos de la imagen fluoroscópica del catéter cardíaco en el seno coronario del corazón del sujeto vivo; y luego
adquirir unos segundos datos de la imagen fluoroscópica del catéter…
Sistema de guía autónomo de un equipo porta-agujas.
(13/05/2020) Sistema de guía autónomo de un equipo porta-agujas para un tratamiento interno de al menos un tumor localizado en un órgano (PR), implicando dicho tratamiento al menos una inserción de una aguja en dicho órgano (PR),
en el que dicho equipo está montado sobre un robot de guía multidireccional capaz de recibir instrucciones de guía (ORD), en el que dicho sistema consta de un módulo informático de procesamiento que comprende:
- un circuito de modelización configurado para generar un modelo digital (M) del órgano a partir de al menos una imagen (I) de dicho órgano (PR) proporcionada por una sonda de imagenología ,
- un circuito…
Sistema robótico quirúrgico de control híbrido.
(29/04/2020) Un sistema robótico quirúrgico, que comprende:
al menos un brazo robótico ;
al menos un sensor ;
un conjunto de control ; un mando ; donde: el al menos un sensor está configurado para detectar una entrada o una condición operativa del al menos un brazo robótico; y
el mando está configurado para poder unirse y separarse del al menos un brazo robótico; y el conjunto de control está configurado para procesar la entrada o la condición, y para operar al menos un brazo robótico en una pluralidad de modos de operación,
donde el conjunto de control ejecuta comandos para el al menos un brazo robótico, a fin de compartir un espacio de trabajo y los elementos quirúrgicos ;
donde los elementos quirúrgicos incluyen al menos una herramienta quirúrgica…
Sistema de dilatación sinusal.
(15/04/2020) Un sistema quirúrgico 20 para dilatar una región del sistema de seno nasal de un paciente, el sistema que comprende: un primer instrumento de dilatación sinusal 22A que incluye: un mango 40 que define un extremo frontal 60 opuesto a un extremo posterior 62:
una sonda rígida 42 que se extiende distalmente desde el extremo frontal del mango, la sonda rígida que define:
un extremo proximal 70 en el extremo frontal del mango,
una punta distal 72 opuesta al extremo proximal,
un segmento curvado 74 entre el extremo proximal y la punta distal;
un globo 28 que tiene un extremo distal 116, el globo que se asegura a la sonda rígida adyacente a la punta distal;
en donde se fija una distancia entre el extremo distal del globo y la punta distal;
una…
Compensación por perturbaciones magnéticas debido al fluoroscopio.
(25/03/2020) Un método que comprende:
generar, usando una pluralidad de trasmisores magnéticos , un campo magnético en una región;
introducir un primer elemento perturbador en la región;
calcular un campo magnético de reacción en la región generada por una pluralidad de fuentes de punto en el elemento perturbador de campo;
colocar una sonda en la región y medir el campo magnético perturbado en la sonda; y
determinar una ubicación de la sonda en respuesta al campo magnético perturbado medido y el campo magnético de reacción calculado,
en donde introducir el elemento perturbador de campo en la región comprende medir una ubicación y una orientación del elemento perturbador de…
Sistemas para romper un campo estéril para la colocación intravascular de un catéter.
(11/03/2020) Sistema de colocación de catéter configurado para colocar de manera precisa un catéter dentro de la vasculatura de un paciente, empleando el sistema de colocación de catéter las siguientes modalidades para mejorar la precisión de colocación del catéter:
1) guiado asistido por ultrasonidos para introducir el catéter en la vasculatura del paciente;
2) un sistema de localización de punta para el seguimiento de la punta del catéter durante su avance a través de la trayectoria de la vasculatura; y
3) un guiado de la punta del catéter basado en señales de ECG para permitir el guiado de la punta del catéter hasta una posición deseada con respecto al nódulo del corazón del paciente desde el que se originan las señales de ECG,
incluyendo el guiado de la punta de catéter basado en señales de ECG medios para hacer pasar señales de ECG desde…
(04/03/2020) Instrumental médico, que comprende un sistema integrado de navegación médico manual , que presenta una unidad de detección óptica con una cámara , una unidad de procesamiento de datos y una unidad de visualización óptica , en donde la unidad de procesamiento de datos está acoplada a la unidad de detección óptica y a la unidad de visualización óptica , en donde la unidad de procesamiento de datos puede procesar los datos de posición y/o de orientación de un dispositivo de marcado médico , que se puede detectar con la unidad de detección , y la información relativa a los mismos se puede representar en la unidad de visualización óptica , en donde el instrumental tiene una unidad de iluminación con la que puede emitirse luz en dirección al dispositivo de…
Sistema y método para análisis y capacitación de procedimiento guiado por imágenes.
(26/02/2020) Un sistema adaptado para registrar y procesar datos de un procedimiento de intervención guiado por imágenes en el que un instrumento de intervención se guía por un operador mediante referencia a una imagen obtenida por un sistema de formación de imágenes (1, 9a) y en el que la posición del instrumento de intervención se rastrea por un sistema de rastreo de posición (1, 5, 9b), que comprende:
una entrada configurada para recibir datos de posición que representan el recorrido del instrumento de intervención durante el procedimiento de intervención guiado por imágenes desde el sistema de rastreo de posición (1, 5, 9b);
un almacenamiento de datos configurado para registrar los datos de posición;
un procesador de datos configurado para procesar…
Aparato para su uso con sistema de guiado de inserción de aguja.
(12/02/2020). Solicitante/s: C.R. BARD, INC.. Inventor/es: GOLDEN, ROBERT, N., COX,JEREMY B, JHO,JIAYE Z.
Sistema de guiado para ayudar en la inserción de una aguja u otro componente médico en el cuerpo de un paciente, en el que el sistema de guiado usa tecnología de obtención de imágenes, comprendiendo el sistema
un dispositivo de obtención de imágenes que incluye una sonda para producir una imagen de un objetivo de parte del cuerpo interna que va a usarse en la tecnología de obtención de imágenes,
incluyendo la sonda uno o más sensores , en el que el uno o más sensores están configurados para detectar una característica detectable de la aguja o el otro componente médico, comprendiendo la aguja o el otro componente médico la característica detectable, y
siendo la característica detectable de la aguja o el otro componente médico un campo magnético de al menos un elemento magnético de la aguja o el otro componente médico.
PDF original: ES-2778041_T3.pdf
Estabilizador para un instrumento quirúrgico.
(12/02/2020) Un estabilizador para usar con un instrumento quirúrgico rastreable , que comprende:
un primer miembro que tiene una primera porción de cuerpo anular en un extremo distal y un primer par de patas que se extiende desde allí y que define un extremo proximal del primer miembro, la primera porción de cuerpo anular incluye una pluralidad de ubicaciones ranuras adaptadas para acoplarse a una porción del instrumento quirúrgico que puede colocarse selectivamente;
un segundo miembro que tiene una segunda porción de cuerpo anular en un extremo proximal del mismo y un segundo par de patas que…
Registro de implante de cadera en cirugía asistida por ordenador.
(08/01/2020) Sistema de navegación quirúrgico asistido por ordenador para registrar la posición de componentes de articulación de cadera protésica, comprendiendo el sistema:
un primer elemento de referencia configurado para ser aplicado a la pelvis y para generar una primera disposición de referencia dinámica tridimensional, que está configurada para ser registrada independientemente en el sistema;
un segundo elemento de referencia configurado para ser aplicado al fémur y para generar una segunda disposición de referencia dinámica tridimensional, que está configurada para ser registrada independientemente en el sistema;
un ordenador…
Método para superponer datos funcionales de NBS sobre una imagen en vivo de un cerebro.
(18/12/2019) Un método para superponer datos funcionales de Estimulación Cerebral por Exploración (NBS) sobre una imagen en vivo de un cerebro, de tal modo que dicho método comprende las etapas de:
- obtener una imagen en vivo de un cerebro,
- obtener un mapa funcional del cerebro, que comprende un modelo anatómico del cerebro y datos funcionales de NBS asociados con el cerebro,
- identificar al menos una marca de referencia anatómica del cerebro a partir de la imagen en vivo del cerebro,
- identificar al menos una de dichas marcas de referencia anatómicas identificadas en el modelo anatómico del cerebro,
- caracterizado…
(05/12/2019). Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: BASCUÑANA PAREJA,Juan Antonio, DE CÓZAR MACÍAS,Óscar D, MARÍN GRANADOS,Manuel D, FERNÁNDEZ CABRERA,Joaquín.
El goniómetro permite realizar un marcaje preciso del eje ocular deseado en la fase inmediata a la cirugía para el tratamiento del astigmatismo. Esencialmente consta de dos discos circulares y transparentes, uno fijo al menos axialmente, en el que están marcados los ángulos desde 0º a los 180º, que se hacen coincidir con los ángulos de 0º a 180º del ojo del paciente; y otro desplazable tanto angular como axialmente, con una marca de referencia y que se desplaza solidariamente a una pieza de marcaje , impregnada de colorante, encargada de marcar el ojo. El dispositivo no solo permite llevar a cabo dicho marcaje de forma precisa y cómoda, sino que también permite llevar a cabo medir el ángulo de lentes tóricas ya implantadas.
Métodos de calibración y detección para catéter con estructuras de detección conectadas en serie.
(04/12/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Inventor/es: CLARK, JEFFREY L., STANLEY,Mark, FANG,ITZHAK, KAMIN,GEORGE.
Un método para calibrar un primer catéter para detectar interferencia con la detección de campo magnético provocada por la presencia de un segundo catéter u otro objeto metálico u ferroso, que comprende:
proporcionar un catéter con un primer sensor (S1, S2, S3) y un segundo sensor (Sx, Sy) con ambos del primer y el segundo sensores adaptados para responder a un campo magnético generado por un generador de campo (MF);
accionar el generador de campo (MF) para permitir que el primer sensor (S1, S2, S3) y el segundo (Sx, Sy) generen señales de calibración;
aplicar fuerzas de desplazamiento axial y desviación angular sobre el catéter ;
calibrar las señales de calibración del primer sensor para crear un primer archivo de calibración y calibrar las señales de calibración del segundo sensor para crear un segundo archivo de calibración.
PDF original: ES-2772124_T3.pdf
Mejora de la eficiencia de la ablación de repetición fusionando mapas actuales y anteriores.
(04/12/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Inventor/es: HAYAM,GAL, TURGEMAN,AHARON, MONIR,GEORGE, BARON,TAL HAIM.
Un sistema para el tratamiento cardíaco, que comprende:
una sonda configurada para su inserción en una cámara del corazón de un paciente; y
un procesador, que está configurado para recibir un mapa inicial de una cámara del corazón de un paciente, adquirido en un procedimiento de ablación inicial, con localizaciones de lesiones de ablación marcadas en el mapa inicial, caracterizado porque dicho procesador está acoplado para adquirir un mapa actual de la cámara usando la sonda en preparación para un procedimiento de ablación repetido, posterior al procedimiento de ablación inicial, y para registrar el mapa inicial con el mapa actual y marcar y mostrar en el mapa actual las localizaciones de las lesiones de ablación desde el mapa inicial registrado.
PDF original: ES-2772846_T3.pdf
Dispositivo y método para un sistema de tratamiento de cirugía ocular asistido por láser.
(20/11/2019) Dispositivo para un sistema de tratamiento quirúrgico ocular asistido por láser, que comprende:
- una primera unidad de captación de imágenes, que está configurada para captar una primera imagen de un ojo a ser tratado,
- una disposición de computadora, que está configurada para reconocer, mediante procesamiento de imagen de la primera imagen, al menos una primera característica (40, 40') del ojo y determinar una posición y una orientación de la primera característica en un sistema (S') de coordenadas del sistema de tratamiento, estando la disposición de computadora además configurada…
Aparato para controlar y planificar una ablación.
(06/11/2019) Un equipo o aparato para visualizar una ablación, de manera que el aparato comprende:
un dispositivo de salida ; y
un procesador , que está configurado para mostrar a un usuario -en el dispositivo de salida- un tubo o conducto tridimensional (3D) que representa visualmente una zona o región para la ablación del tejido de un paciente, para recibir del usuario información sobre la ablación que especifica una o más ubicaciones de ablación situadas a lo largo del tubo tridimensional y una o más configuraciones de ablación respectivas para ablacionar las ubicaciones de ablación, y para mostrar al usuario -en el tubo tridimensional- el impacto estimado de la ablación sobre el tejido basándose en las ubicaciones de ablación y las correspondientes configuraciones de ablación,…
Tratamiento del dolor de cabeza por inyección de sustancia neuroinhibidora al ganglio esfenopalatino o al ganglio ótico.
(31/10/2019) Una sustancia neuroinhibidora para usar en un método para tratar o prevenir el dolor de cabeza que comprende inyectar una sustancia neuroinhibidora en las proximidades del ganglio esfenopalatino u ganglio ótico en la que un dispositivo de inyección que comprende dicha sustancia neuroinhibidora se lleva a 5 mm del ganglio esfenopalatino o ganglio ótico insertando dicho dispositivo de inyección en el paciente de forma infra cigomática y la sustancia neuroinhibidora inyectada muy cerca del SPG o OG;
en la que la sustancia neuroinhibidora es toxina botulínica, neurotoxina tetánica, toxina alfa estafilocócica y toxina acilpoliamina; y
en la que el dispositivo de inyección define una línea recta desde la penetración de la piel/mucosa hasta el punto cercano al SPG y OG donde se produce la liberación de sustancias neuroinhibitorias.
Instrumento médico que contiene un sensor de rastreo con un núcleo de polvo de ferrita.
(30/10/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Inventor/es: GOVARI, ASSAF, GLINER,VADIM.
Un equipo o aparato, que comprende:
un instrumento médico; y
al menos un sensor de rastreo que está situado en la porción distal del instrumento, de manera que el sensor comprende:
un núcleo de ferrita rígido que comprende un tubo que contiene polvo de ferrita, y
una bobina que está enrollada alrededor del tubo,
de manera que el polvo de ferrita se comprime dentro del tubo.
PDF original: ES-2767279_T3.pdf
Uso de sensor de fuerza para proporcionar ángulo de haz de ultrasonidos.
(16/10/2019) Un aparato que comprende:
una sonda flexible que tiene una parte proximal y un extremo distal para su inserción en una cavidad corporal de un paciente, la sonda teniendo una punta distal en el extremo distal de la sonda;
un transmisor dentro de la sonda;
un sensor de posición dentro de la sonda que recibe señales del transmisor para detectar una posición de la punta distal con respecto al extremo distal de la sonda;
un sensor de fuerza de contacto elástico dispuesto en la sonda entre el transmisor y el sensor de posición, que acopla la punta distal con el extremo distal de la sonda y está configurado para deformarse en respuesta a la presión ejercida sobre la…
Estructura de almohadilla de localización fluoro-invisible para procedimientos cardiacos.
(16/10/2019) Una almohadilla de localización , que comprende:
múltiples generadores de campo (36A, 36B, 36C, 36D), que están configurados para generar campos magnéticos respectivos en una región de interés del cuerpo de un paciente, para medir una posición de un instrumento médico en el región de interés ;
un armazón , que está configurado para fijar los múltiples generadores de campo (36A, 36B, 36C, 36D) en las posiciones respectivas que rodean la región de interés , en donde el armazón está abierto en por lo menos un lado de la región de interés ; y
en donde por lo menos uno de los generadores de campo comprende tres bobinas no concéntricas que están dispuestas en un único plano, en donde las bobinas no concéntricas están orientadas…
Circuito de generación de campos magnéticos para un sistema de seguimiento.
(16/10/2019) Un aparato, que comprende:
un generador de señales , configurado para suministrar una señal que tiene tanto una primera frecuencia dominante como una segunda frecuencia dominante; y
un circuito eléctrico , que comprende un componente reactivo, configurado para generar, después de que la señal se suministre al circuito eléctrico, un campo magnético que tiene tanto la primera frecuencia dominante como la segunda frecuencia dominante, en virtud de que el componente reactivo resuena simultáneamente a tanto la primera frecuencia dominante como a la segunda frecuencia dominante;
por lo menos un primer sensor , configurado…
Generadores de campos magnéticos usando bobinas no concéntricas.
(09/10/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Inventor/es: GOVARI, ASSAF, GLINER,VADIM.
Un generador de campo, que comprende tres bobinas planas que están dispuestas en un único plano, en donde por lo menos dos de las bobinas no son concéntricas y están enrolladas alrededor de los ejes respectivos que no son paralelos entre sí, para generar campos magnéticos respectivos que no son paralelos entre sí,
y caracterizado porque las por lo menos dos bobinas no concéntricas están dispuestas una al lado de la otra en el único plano, y en donde la tercera bobina está localizada alrededor de las por lo menos dos bobinas no concéntricas.
PDF original: ES-2764397_T3.pdf
Sistemas de instrumentos robóticos que utilizan sensores de fibra óptica.
(09/10/2019) Un sistema que comprende:
un cuerpo de instrumento alargado ;
un sensor de fibra óptica acoplado al cuerpo de instrumento alargado y que forma un sensor de deformación, comprendiendo el sensor de fibra óptica un núcleo que incluye rejillas de Bragg de fibra;
y un sistema para calibrar dicho sensor de fibra óptica asociado con dicho cuerpo de instrumento alargado de un instrumento alargado, que comprende:
un útil de calibración configurado para posicionar el cuerpo de instrumento alargado en una configuración geométrica conocida; en el que dicho útil de calibración tiene una ranura en la que el cuerpo de instrumento alargado y el sensor de fibra óptica pueden colocarse…
Visualización de puesta a cero manual de apoyo.
(02/10/2019). Solicitante/s: Biosense Webster (Israel), Ltd. Inventor/es: KRUPNIK,RONEN, KATZ,NATAN SHARON, LUDWIN,DORON MOSHE, TURGEMAN,AHARON.
Un aparato que comprende:
una sonda , configurada para su inserción en una cavidad corporal que tiene un pool sanguíneo de un paciente y que comprende un sensor de fuerza de contacto para medir una fuerza aplicada al sensor de fuerza de contacto y sensores de localización para detectar una ubicación de la sonda en la cavidad corporal; y
un procesador , que está configurado para recibir una pluralidad de mediciones del sensor de fuerza de contacto y operativo para:
generar una imagen del pool sanguíneo en base a los datos de imágenes recibidos de una modalidad de obtención de imágenes externa;
retirar una parte del pool sanguíneo de la imagen para retener una parte restante del pool sanguíneo en el mismo, en donde la parte retirada comprende una parte del pool sanguíneo adyacente a una superficie de la cavidad corporal; y
presentar una ubicación de un segmento distal de la sonda en la imagen.
PDF original: ES-2762212_T3.pdf
Dispositivo de medición de presión.
(18/09/2019). Solicitante/s: Fibragg Diagnostics GmbH. Inventor/es: HECKER,RAOUL, BARZ,THOMAS, MELLOH,MARKUS.
Dispositivo de medición de presión para la medición de presión en un sistema biológico con un soporte de célula de medición configurado de manera flexible o flexoelástica y que consta de al menos de una guía de ondas de luz, que presenta un extremo próximo a la unidad de evaluación y un extremo alejado de la unidad de evaluación , caracterizado por que en el soporte de célula de medición están presentes al menos dos sensores de rejilla de Bragg de fibra dispuestos de manera distanciada entre sí y en el extremo alejado de la unidad de evaluación está dispuesto un interferómetro Fabry-Pérot , el cual se compone de al menos un extremo del extremo alejado de la unidad de evaluación del soporte de célula de medición así como al menos una membrana espejada deformable, pudiendo evaluarse el interferómetro Fabry-Pérot en la misma ventana de longitud de onda que los sensores de rejilla de Bragg de fibra.
PDF original: ES-2759251_T3.pdf
Método y sistema para encender una herramienta inalámbrica cuando se detectan frecuencias de ubicación.
(04/09/2019) Un método para administrar o gestionar la energía de una herramienta inalámbrica -o instrumento inalámbrico- , que incluye:
obtener una señal electromagnética mixta que comprende diversas señales electromagnéticas emitidas por una placa de ubicación , de manera que cada señal electromagnética es emitida por la bobina respectiva de la placa de ubicación , y de manera que cada señal electromagnética tiene una frecuencia diferente;
determinar un voltaje o tensión basándose en la señal electromagnética mixta, de manera que el voltaje es proporcional a la distancia de la herramienta inalámbrica respecto a la placa de ubicación ;
pasar la herramienta inalámbrica a un modo de hibernación cuando el voltaje sea inferior a una cantidad o nivel predeterminado; y
pasar la herramienta inalámbrica a…
Rastreador de red para vigilancia y diagnóstico del sistema.
(28/08/2019). Ver ilustración. Solicitante/s: Biosense Webster (Israel), Ltd. Inventor/es: GOVARI, ASSAF, ALTMANN,ANDRES CLAUDIO, KHUDISH,OLEG.
Un método para su uso en un sistema médico, comprendiendo el método:
recibir señales analógicas de uno o más componentes del sistema médico a través de una interfaz de entrada / salida (E / S);
convertir las señales analógicas en señales digitales para formar señales procesadas;
monitorizar un bus del sistema para uno o más paquetes recibidos a través de una primera interfaz, en donde el uno o más paquetes comprenden las señales procesadas del uno o más componentes del sistema médico;
identificar un origen del uno o más paquetes;
monitorizar los intervalos de tiempo entre uno o más paquetes para determinar el estado de conexión de uno o más componentes;
analizar cada uno de los uno o más paquetes en un encabezado de paquete y datos;
inspeccionar los datos en busca de errores;
transmitir una indicación del estado de la conexión y una indicación de errores a una pantalla a través de una segunda interfaz.
PDF original: ES-2755353_T3.pdf
Un sistema y método para programación asistida por ordenador de trayectorias para una inserción quirúrgica en un cráneo.
(21/08/2019) Un método de uso de un sistema informático para ayudar en la programación de una trayectoria para una inserción quirúrgica en un cráneo, comprendiendo el método:
proporcionar al sistema informático una representación tridimensional del cráneo y de objetos cruciales ubicados dentro del cráneo, en el que dichos objetos cruciales comprenden características anatómicas a evitar durante la inserción quirúrgica;
proporcionar al sistema informático una ubicación diana para la inserción dentro del cráneo;
generar mediante el sistema informático un primer conjunto que comprende una pluralidad de puntos de…
Punta de catéter de múltiples electrodos y método para preparar la misma.
(07/08/2019) Un armazón flexible eléctricamente conductor que comprende:
un tubo metálico cilíndrico hueco eléctricamente conductor que tiene una superficie exterior, una circunferencia y un eje longitudinal (L-L), el tubo metálico teniendo una pluralidad de cortes a lo largo del eje longitudinal para formar un armazón flexible que comprende una pluralidad de cables conductores paralelos , cada uno de la pluralidad de cables conductores estando espaciados equitativamente circunferencialmente a lo largo del eje longitudinal del tubo por un hueco para aislar eléctricamente la pluralidad de cables;
un primer electrodo (40a, 40b, 40c) montado alrededor de la circunferencia del armazón flexible a lo largo del eje longitudinal del tubo y unido a un primer cable (321, 32b, 32c) de la pluralidad de cables;
un segundo electrodo (40a, 40b,…
Catéter de dilatación del seno frontal.
(07/08/2019) Sistema de catéter con balón para dilatar el tracto de salida de una cavidad sinusal que comprende: un dispositivo que comprende:
un miembro de guía interior metálico que presenta un extremo proximal , un extremo distal y
un lumen , que se extiende a lo largo de una longitud del mismo y termina en el extremo distal ;
un eje acoplado a un balón , el eje tiene un primer lumen a lo largo de al menos una porción del mismo que contiene el miembro de guía interior metálico , el eje y el balón , que están colocados de forma deslizante sobre el miembro de guía interior metálico , el eje tiene un segundo lumen acoplado operativamente al interior del balón ;…
{kind=link}