CIP-2021 : B25J 9/04 : por rotación de un brazo al menos, excluyendo el movimiento de la mano,
p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/04[2] › por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/04 · · por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
CIP2021: Invenciones publicadas en esta sección.
Aparatos y procedimientos para el accionamiento remoto de puntos de control.
(24/06/2020) Aparato para el accionamiento remoto de un punto de control , que comprende:
un elemento alargado que tiene un primer extremo y un segundo extremo,
un elemento de apoyo que tiene una parte móvil , la parte móvil está acoplada de manera ajustable con el elemento alargado a lo largo de cualquier parte de la longitud del elemento alargado de manera que el primer extremo y el segundo extremo del elemento alargado están libres del contacto con el aparato para el accionamiento remoto de un punto de control durante una función de accionamiento;
un mecanismo de impulso en comunicación con la parte móvil , el mecanismo de impulso está configurado para proporcionar par a la parte móvil y al elemento alargado en respuesta a una fuerza motriz, en el que el mecanismo de impulso está desplazado de la parte móvil …
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo.
(06/11/2019) Conjunto de soporte de husillo para el empleo en una máquina herramienta, con:
- una sección de alojamiento del brazo articulado que se puede disponer o bien instalar sobre una bancada de la máquina herramienta,
- un primer brazo articulado alojado en la primera sección de alojamiento del brazo articulado de forma pivotable alrededor de un primer eje de rotación (R1),
- un segundo brazo articulado alojado en el primer brazo articulado de forma pivotable alrededor de un segundo eje de rotación (R2),
- un brazo de soporte del husillo alojado en el segundo brazo articulado de forma giratoria alrededor de…
Robot de instalación de revestimiento, en particular robot de manipulación.
(04/09/2019) Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil durante una operación de pintado, con una cinemática de robot para el movimiento de un efector en el espacio, que presenta:
a) un primer elemento de robot dispuesto de forma proximal,
b) un segundo elemento de robot que está dispuesto cinemáticamente detrás del primer elemento de robot y es móvil con respecto al primer elemento de robot ,
c) un primer brazo de robot con una cinemática en paralelo, estando dispuesto el primer brazo de robot cinemáticamente detrás del segundo elemento de robot y siendo móvil con respecto al segundo elemento de robot , y
d) un tercer elemento de robot ,…
Robot industrial de múltiples ejes, en particular de tipo SCARA.
(28/02/2019) Un robot industrial de múltiples ejes, en particular de tipo SCARA, que comprende:
- una estructura base;
- un primer brazo de robot conectado de manera pivotante a la estructura base alrededor de un primer eje (I) de rotación;
- un segundo brazo de robot conectado de manera pivotante a dicho primer brazo alrededor de un segundo eje (II) de rotación paralelo a dicho primer eje; y
- una unidad operativa, que es transportada por dicho segundo brazo y puede ser accionada en un primer movimiento de traslación a lo largo de un tercer eje (III) y en un segundo movimiento de rotación alrededor de dicho tercer eje, siendo dicho tercer eje paralelo a dichos primer y segundo ejes;
en el que dicha estructura base comprende:
- un cuerpo…
Robot industrial de ejes múltiples, en particular de tipo SCARA.
(23/01/2019) Un robot industrial de ejes múltiples, en particular de tipo SCARA, que comprende:
- una estructura de base;
- un primer brazo conectado sobre pivote a la estructura de base alrededor de un primer eje geométrico de rotación (I);
- un segundo brazo conectado sobre pivote a dicho primer brazo alrededor de un segundo eje geométrico de rotación (II) paralelo a dicho primer eje geométrico (I); y
- una unidad operativa soportada por un eje que está montada sobre dicho segundo brazo y puede ser arrastrada, por medio de un conjunto (M1, M2, R, 22, 24) de accionamiento, en un primer movimiento de traslación a lo largo de un tercer eje geométrico (lll) y en un segundo movimiento de rotación alrededor de dicho tercer eje geométrico, siendo dicho tercer eje geométrico paralelo…
Sistema robótico médico con brazo manipulador del tipo de coordenadas cilíndricas.
(08/11/2018) Sistema robótico médico para llevar a cabo procedimientos médicos, que comprende un manipulador de robot para la manipulación asistida por robot de un instrumento médico , en el que dicho manipulador de robot comprende:
una base ;
un brazo de manipulador, que tiene una parte esencialmente vertical soportada por dicha base y una parte esencialmente horizontal soportada por dicha parte vertical;
una muñeca de manipulador, soportada por dicho brazo del manipulador; y
una unidad efectora , soportada por dicha muñeca del manipulador y configurada para sujetar un instrumento médico;
dicho brazo del manipulador tiene una configuración cinemática PRP cilíndrica, que tiene, en secuencia…
Sistema de posicionador de pacientes.
(08/11/2017) Un sistema de posicionador de pacientes, que comprende:
un brazo robótico que proporciona cinco grados de libertad de rotación y un grado de libertad lineal en la dirección vertical que tiene un primer segmento de brazo de robot, un segundo segmento de brazo de robot que está unido de forma móvil en un primer extremo al segundo extremo del primer segmento de brazo de robot, el segundo segmento de brazo de robot está unido al primer segmento de brazo para extenderse paralelo a él de manera que el segundo segmento de brazo es rotativo, un conjunto de gorrón robótica está unido en el segundo extremo del segundo segmento de brazo, extendiéndose…
AERONAVE CON DISPOSITIVO DE CONTACTO.
(02/06/2017). Solicitante/s: FUNDACION ANDALUZA PARA EL DESARROLLO AEROESPACIAL. Inventor/es: OLLERO BATURONE,ANIBAL, VIGURIA JIMENEZ,Antidio, JIMÉNEZ BELLIDO,Antonio, TRUJILLO SOTO,Miguel Ángel, MÁRQUEZ FONT,José Carlos, PETRUS MORENO,Ángel Luis, GARCÍA FREIRE,Juan Jesús.
Aeronave con dispositivo de contacto.
Aeronave con capacidad de vuelto estacionario y con dispositivo de contacto. Comprende un cuerpo principal de la aeronave, un sistema de propulsión , un dispositivo de contacto y una unidad de procesamiento y control. El dispositivo de contacto comprende un primer cuerpo unido al cuerpo principal y orientado sobre el centro de masas de la aeronave; un segundo cuerpo que se mueve sobre el primer cuerpo (primer grado de libertad) del dispositivo de contacto ; y un tercer cuerpo con una sección central mediante la que se vincula al segundo cuerpo con un eje de unión sobre el que gira el tercer cuerpo respecto a dicho segundo cuerpo (segundo grado de libertad), y con dos segmentos de los que un primer segmento es telescópico (tercer grado de libertad).
PDF original: ES-2614994_B1.pdf
PDF original: ES-2614994_A1.pdf
Dispositivo del tipo de robot de brazo articulado.
(21/09/2016) Dispositivo del tipo de un robot de brazo articulado para la manipulación de una carga útil, con un brazo de robot (R), que
- está fijado en una base giratoria alrededor de un primer eje (A1),
- que posee al menos dos miembros de brazos dispuestos en serie unos detrás de otros a modo una cadena cinemática, cuyo primer miembro de brazo está alojado de forma pivotable en la base alrededor de un segundo eje (A2) orientado ortogonal al primer eje y cuyo segundo miembro de brazo está colocado de forma pivotable en el primer miembro de brazo alrededor de un tercer eje (A3) orientado paralelo al segundo brazo (A2), así como
- una mano central (AZ) colocada en el lado extremo en la cadena cinemática, en el que está previsto un primer actuador lineal , que articula el primer miembro de brazo alrededor del segundo…
Dispositivo con mecanismo Scott-Russell.
(23/03/2016) Un dispositivo con mecanismo Scott Russell, que comprende:
un miembro de brazo principal;
un miembro de brazo secundario acoplado de forma pivotante al miembro de brazo principal; y
un cambiador de ángulo para cambiar un ángulo de acoplamiento entre el miembro de brazo principal y el miembro de brazo secundario,
en el que una parte (41a) extrema de la base del miembro de brazo principal y una parte (51a) extrema de la base del miembro de brazo secundario, es decir en el lado opuesto desde el lado de acoplamiento del miembro de brazo secundario, están situados en la misma línea recta virtual (L1), y una primera…
Estimación de fuerza para un sistema de cirugía robotizada mínimamente invasiva.
(08/07/2015) Sistema médico mínimamente invasivo que comprende un manipulador que presenta una unidad efectora provista de un sensor de fuerza/par de 6 grados de libertad (6-DOF) y configurada para sujetar un instrumento mínimamente invasivo que presenta un primer extremo montado en dicha unidad efectora y un segundo extremo situado más allá de un fulcro externo que limita dicho instrumento en movimiento, comprendiendo dicho sistema un dispositivo informático programable, caracterizado por que dicho dispositivo informático está programado para:
determinar una posición de dicho instrumento con respecto a dicho fulcro;
tratar las mediciones realizadas mediante el sensor de fuerza/par…
Estimación de fuerza para un sistema de cirugía robotizada mínimamente invasiva.
(18/02/2015) Sistema médico mínimamente invasivo que comprende un manipulador robotizado que tiene una unidad efectora equipada con un sensor de fuerza/par de 6 grados de libertad (6 DOF) , el cual tiene un sistema de referencia (X, Y, Z) de sensor con tres ejes que son ortogonales entre sí y está configurado para sujetar un instrumento mínimamente invasivo , presentando dicho instrumento , cuando es sujetado por dicha unidad efectora , un primer extremo montado en dicha unidad efectora, un segundo extremo situado más allá de un fulcro externo que limita el movimiento de dicho instrumento y un árbol de instrumento con un eje longitudinal que es colineal con un eje de instrumento…
Robot y sistema de transferencia de sustrato.
(06/08/2014) Un robot de transferencia de sustrato que comprende:
un efector extremo configurado para sostener un sustrato en un estado sensiblemente horizontal;
una unidad de accionamiento vertical configurada para accionar el efector extremo para moverse en una dirección vertical;
una unidad de accionamiento horizontal configurada para accionar la unidad de accionamiento vertical para moverse en una dirección horizontal; y
una unidad de accionamiento de rotación configurada para rotar la unidad de accionamiento horizontal alrededor de un eje de rotación que se extiende en la dirección vertical,
en el que un extremo del efector extremo está conectado con la unidad de accionamiento vertical,
en el que…
(11/12/2013) Dispositivo de pintura para pintar unos componentes , en particular para pintar carrocerías de automóvileso partes de las mismas, con
a) un robot de pintura de varios ejes , que posiciona un pulverizador,
b) un control de robot para controlar el robot de pintura , y
c) un armario de control , que contiene el control de robot ,
d) una tecnología de aplicación con componentes para medios de revestimiento utilizados con frecuencia ycomponentes para medios de revestimiento utilizados con poca frecuencia,
en el que
e) el armario de control forma una columna de soporte, que soporta mecánicamente el robot de pintura ,
f) los componentes de la tecnología…
Prensa dobladora con dispositivo de alimentación y procedimiento para su utilización.
(19/03/2013) Instalación de producción para el conformado por doblado de placas o piezas , con una prensa dobladora ,con una viga de mesa fija y con una viga de prensado en un bastidor de la máquina en unas guías conrelación a la viga de la mesa mediante un sistema de accionamiento , y con unas herramientas de doblado dispuestas sobre superficies frontales enfrentadas entre sí de la viga de la mesa y de la viga de prensado , y conun manipulador que se puede desplazar sobre una pista de desplazamiento en una trayectoria paralela a unaextensión longitudinal de las vigas de la mesa y de doblado para efectuar la transferencia de piezas entre undispositivo de alimentación o almacenamiento para las…
Dispositivo de procesamiento de cable.
(15/08/2012). Solicitante/s: SCHAFER WERKZEUG- UND SONDERMASCHINENBAU GMBH. Inventor/es: NEUBAUER, STEFAN.
Dispositivo de procesamiento de cable con estaciones de procesamiento para confeccionar un cable,estando previsto al menos un brazo pivotante para la alimentación del cable a las estaciones deprocesamiento y estando montado el brazo pivotante por medio de un carro en una guía deuna placa giratoria , que se extiende en paralelo a la dirección longitudinal del brazo pivotante ypudiendo pivotar mediante un primer motor con la placa giratoria y desplazarse de un lado a otro enparalelo a su dirección longitudinal mediante un segundo motor montado de manera estacionaria en laguía , caracterizado porque mediante el segundo motor puede hacerse girar un árbol excéntrico ,que presenta una excéntrica y porque el carro puede desplazarse de un lado a otro en la guía mediante la excéntrica.
PDF original: ES-2393136_T3.pdf
DISPOSITIVO DE LIMPIEZA PARA PANELES FOTOVOLTAICOS Y PANELES TERMOSOLARES.
(31/05/2011) Se describe un dispositivo para la limpieza de módulos solares, tanto de tipo fotovoltaicos como de tipo termosolares, mediante la proyección pulverizada de un líquido de limpieza sobre la superficie de los módulos. El dispositivo es de tipo arrastrado, para su incorporación en un vehículo tractor o similar, y está implementado en base a un conjunto articulado que comprende una estructura de paralelogramo acoplada, con posibilidad de giro a una estructura de soporte solidaria con el vehículo portador, unida por el extremo opuesto a un brazo telescópico que incorpora articuladamente en su extremo distal una barra de proyección, de posicionamiento variable, que integra una multiplicidad de boquillas de proyección del líquido de limpieza. La barra de proyección incluye sensores mecánicos de posicionamiento sobre la superficie. Los distintos movimientos se…
DISPOSITIVO DE PULVERIZACION DESTINADO ESPECIALMENTE A UNA CABINA DE PINTURA DE CARROCERIA AUTOMOVIL.
(01/06/2007). Solicitante/s: EISENMANN FRANCE SARL. Inventor/es: RODRIGUES, JOSE, FOUVET, MICHEL.
Dispositivo de pulverización de un producto de recubrimiento destinado especialmente a una cabina de pintura para carrocerías automóviles , comprendiendo un brazo móvil permitiendo de asegurar un movimiento de seguimiento, paralelamente al eje de transporte del objeto a recubrir desplazándose en un plano horizontal sobre un transportador o similar, y a la extremidad del cual está situado colocado un pulverizador , caracterizado porque el brazo móvil está montado pivotante alrededor de un primer eje sobre una base formando una placa giratoria dispuesta en un plano sensiblemente vertical, estando dicho primer eje situado en un plano paralelo a dicha placa , estando la base montada pivotante alrededor de un eje sensiblemente horizontal y sensiblemente perpendicular al eje de transporte , y estando dicha base guiada para efectuar un movimiento de translación sensiblemente perpendicular a su eje de pivoteamiento.
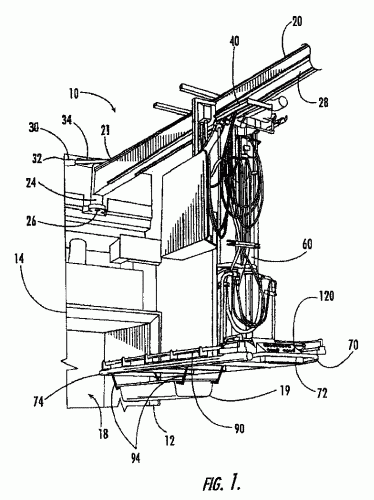
APARATO PARA LA MANIPULACION DE MIEMBROS ESTRUCTURALES.
(01/11/2006). Ver ilustración. Solicitante/s: THE BOEING COMPANY. Inventor/es: SANDERS, DANIEL G., SCHERGEN, MARK T.
Un aparato para manipular un elemento estructural, por ejemplo de 65 kg o más, y el cual es caliente, afilado, tóxico o de otro modo peligroso con: una viga que se extiende desde un primer extremo a un segundo extremo; una lanzadera en comunicación de traslación con dicha viga en una dirección que se extiende entre dichos extremos primero y segundo, un accionador de horquilla conectado a dicha lanzadera, teniendo dicho accionador de horquilla una primera porción y una segunda porción y capaz de levantar y bajar hidráulicamente dicha segunda porción, y una horquilla conectada a dicha segunda porción de dicho accionador de horquilla.
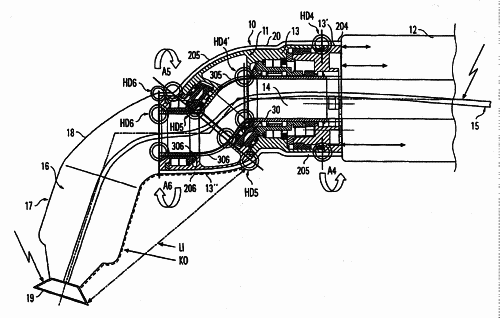
MAQUINA DE REVESTIMIENTO CON UN PULVERIZADOR Y UNA ARTICULACION GIRATORIA.
(16/10/2005). Ver ilustración. Solicitante/s: DURR SYSTEMS GMBH. Inventor/es: HERRE, FRANK, HEZEL, THOMAS, HAAS, JURGEN.
Máquina de revestimiento para el revestimiento en serie electrostático de piezas de trabajo con un pulverizador el cual para la carga del material de revestimiento rociado por él está conectado a una conducción de alta tensión , y con una articulación giratoria que conecta el pulverizador con un brazo de máquina móvil, cuyos elementos pueden ser girados relativamente unos respecto de los otros por un mecanismo de accionamiento que se encuentra en la articulación y que forman un espacio hueco para las conducciones que conducen al pulverizador, caracterizada porque entre el pulverizador y el brazo de máquina se extiende, a lo largo de la articulación giratoria , una envoltura aislante para la alta tensión del pulverizador, la cual presenta, en función de los elementos de la articulación giratoria que pueden ser girados relativamente unos respecto de los otros, unas secciones que giran unas con respecto a las otras.
MAQUINA-HERRAMIENTA CON DISPOSITIVO PARA CAMBIO AUTOMATICO DE HERRAMIENTAS.
(01/12/2004) Configuración de maquina herramienta con al menos una máquina herramienta y con al menos un aparato para cambiar las herramientas automáticamente, que consta esencialmente de al menos un estante, un almacén o un dispositivo similar diseñados para alojar las herramientas individuales a cambiar y al menos un dispositivo de substitución de herramientas , donde el robot que actúa como dispositivo de substitución de herramienta tiene una posición fija especificada o una trayectoria de movimiento constante especificada en relación con el(los) almacén(es) o estante(s), donde el(los) almacén(es) de herramientas o los estantes de recepción de herramientas está(n) fijo(s) y/o estático(s) durante la utilización, y tiene(n) alojamiento(s) de enchufe en los que las herramientas son insertadas y en las que las herramientas…
ROBOT MANIPULADOR E INSTALACION QUE LO INCLUYE.
(01/07/2004) Robot manipulador motorizado que comprende un primer motor y un brazo manipulador desplazable por medio de este primer motor controlado por una unidad de mando y control , dicho primer motor y dicha unidad se instalan en un bastidor montado sobre unos órganos de rodadura , , el primer motor estando equipado con un árbol de salida rotativo (6a) en el que se dispone de un par mecánico, caracterizado por el hecho de que: - el brazo manipulador está fijado por una de sus extremidades a un cubo provisto de un fileteado axial en el que se introduce atornillada la parte fileteada de un árbol de conducción acoplado al árbol de salida rotativo del primer motor, - un mecanismo de freno está ligado al cubo y al árbol motor , este mecanismo…
MAQUINA ROBOTIZADA PROVISTA DE AL MENOS UN BRAZO CON PATOGRAFO SIMETRICO, POR EJEMPLO PARA LA RECOGIDA DE FRUTA O PARA LA CLASIFICACION DE OBJETOS DIVERSOS.
(16/11/2003) Máquina robotizada, por ejemplo para la recogida de frutas o para la clasificación de objetos diversos, que comprende un manipulador de coordenadas esféricas, con al menos tres grados de libertad: dos rotaciones perpendiculares y concurrentes Theta y Phi, y una traslación Rho de su prensor hacia el objeto que debe ser agarrado, de tal modo que el eje de traslación (A3) de la cabeza de prensión (20a) de este prensor se interseca siempre con los dos ejes Theta (A1) y Phi (A2) de las rotaciones en un punto central (I), estando provisto este manipulador de coordenadas esféricas de un sistema de visión artificial para la localización de los objetos por agarrar, sistema cuyo centro óptico está situado exactamente en dicho punto central (I), incluyendo dicho manipulador de coordenadas esféricas, un brazo de manipulación…
(16/04/1999). Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: TELLDEN, LEIF.
LA INVENCION SE REFIERE A UN ROBOT INDUSTRIAL CON DOS BRAZOS DE ROBOT INFERIORES DIRIGIDOS HACIA ARRIBA DESDE UN PIE DE ROBOT FIJO , ESTANDO ESTOS EN SUS EXTREMOS INFERIORES PIVOTALMENTE ARTICULADO EN EL PIE , ALREDEDOR DE EJES HORIZONTALES (A1,A2) Y ESTANDO INTERCONECTADAS EN SUS EXTREMOS SUPERIORES PIVOTALMENTE MEDIANTE UN YUGO , Y DE TAL MANERA QUE SE FORMA UNA UNION DE CUATRO BARRAS. LA UNION ESTA PROVISTA CON UNA PRIMERA UNIDAD DIRECCIONAL . UN BRAZO ROBOT SUPERIOR SE ENCUENTRA ARTICULADO ALREDEDOR DE UN QUINTO EJE (D) EN UN ELEMENTO DE FIJACION SOPORTADO POR UN YUGO , Y QUE ESTA ROTATORIAMENTE ARTICULADO ALREDEDOR DE UN SEXTO EJE (C). EL BRAZO ROBOT SUPERIOR Y SU ELEMENTO FIJADOR ESTAN PROVISTOS DE UNA SEGUNDA Y TERCERA UNIDAD DIRECCIONAL (24 Y 26) RESPECTIVAMENTE.
ROBOT INDUSTRIAL CON UNIDADES DE ENGRANAJE REDUCTOR INTEGRADAS.
(01/07/1997). Solicitante/s: COMAU S.P.A.. Inventor/es: MAULETTI, ENRICO.
SE PROPORCIONA UN ROBOT INDUSTRIAL CON UNA PLURALIDAD DE ELEMENTOS ARTICULADOS UNOS A OTROS, CUYA ROTACION SE ACCIONA POR RESPECTIVOS MOTORES ELECTRICOS MEDIANTE UNIDADES DE ENGRANAJES REDUCTORES, QUE ESTAN INTEGRADAS EN LA ESTRUCTURA DE ESTOS ELEMENTOS.
(01/05/1997). Solicitante/s: COMAU S.P.A.. Inventor/es: MAULETTI, ENRICO.
SE DESCRIBE UN ROBOT INDUSTRIAL CON NUEVA CONFIGURACION, INCLUYENDO UN BRAZO ROTATORIAMENTE MONTADO ALREDEDOR DE UN PRIMER EJE VERTICAL, SOBRE UN CUERPO FIJO , UN SEGUNDO CUERPO ROTATORIAMENTE MONTADO ALREDEDOR DE UN SEGUNDO EJE VERTICAL, POR DEBAJO DEL CITADO BRAZO , UNA ARTICULACION EN FORMA DE PARALELOGRAMO, ROTATORIAMENTE MONTADA ALREDEDOR DE UN TERCER EJE HORIZONTAL, SOBRE EL SEGUNDO CUERPO , Y UN MUÑON LLEVADO POR LA ARTICULACION EN FORMA DE PARALELOGRAMO, Y ARTICULADA ALREDEDOR DE DOS EJES MUTUAMENTE ORTOGONALES.
DISPOSITIVO PARA MANIPULACION DE OBJETOS.
(16/04/1997). Solicitante/s: STADELE, BERTA. Inventor/es: STADELE, ERHARD.
EN UN DISPOSITIVO PARA LA MANIPULACION DE OBJETOS CON AL MENOS UNA UNIDAD DE AGARRE, QUE ESTA CONECTADA POR MEDIO DE AL MENOS UN BRAZO A UN MECANISMO MOTRIZ Y A UN MOTOR DE ACCIONAMIENTO, ESTA PROVISTO CON AL MENOS UN EJE HUECO EN EL BRAZO, SIENDO TRANSMISIBLE EL MOVIMIENTO DE ROTACION DEL EJE A UN EJE SUBSECUENTE. EL EJE HUECO ENGRANA POR MEDIO DE ASPILLERAMIENTOS DENTRO DE CAVIDADES DE UNA UNIDAD DE ACOPLAMIENTO, TENIENDO LA UNIDAD DE ACOPLAMIENTO UN DENTADO HELICOIDAL EN SU OTRO EXTREMO.
MANIPULADOR DE VARIOS EJES.
(01/08/1996). Solicitante/s: KUKA ROBOTER GMBH. Inventor/es: ZIMMER, ERNST.
LA INVENCION SE REFIERE A UN MANIPULADOR DE VARIOS EJES, CON UN BASTIDOR Y UN PLATO HORIZONTAL ACCIONADO Y DISPUESTO SOBRE EL MISMO EN TORNO A UN EJE BASICO GIRATORIO . EL BASTIDOR PRESENTA UNA COLUMNA DE APOYO CENTRAL, CONCEBIDA COMO APOYO DEL PAR Y DEL RODAMIENTO DEL PLATO HORIZONTAL . EL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SE HA DISPUESTO ESENCIALMENTE A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL , EN EL QUE EL MOTOR ESTA SITUADO SOBRE EL PLATO HORIZONTAL , Y LA PARTE DEL ACCIONAMIENTO DE LA TRANSMISION , ESTA DISPUESTA A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL . CON ESTA ESTRUCTURA, LAS PARTES DEL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SON MAS ACCESIBLES PARA FINES DE MONTAJE Y DE MANTENIMIENTO, POR LO QUE SE OBTIENE TAMBIEN PARA EL RODAMIENTO UN ANCHO DE APOYO RELATIVAMENTE REDUCIDO Y CON ELLO UN AHORRO DE ESPACIO.
ROBOT ARTICULADO CON DOS ANTEBRAZOS.
(16/06/1995). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
UN ROBOT ARTICULADO TIENE UN BRAZO Y DOS ANTEBRAZOS , LOS CUALES ESTAN ARTICULADOS AL BRAZO ALREDEDOR DEL MISMO EJE Y CONTROLADOS POR MEDIOS DE CONDUCCION INDEPENDIENTES.
MEJORAS INTRODUCIDAS EN UNA UNIDAD DE GIRO INTERMITENTE.
(16/08/1992) MEJORAS INTRODUCIDAS EN UNA UNIDAD DE GIRO INTERMITENTE. CONSISTE EN RELACIONAR EL BALANCIN DE TRANSMISION DE MOVIMIENTO AL EJE DE SALIDA CON LAS LEVAS PLANAS Y 99) A TRAVES DE RODILLOS Y MONTADOS SOBRE OREJETAS LATERALES Y DEL CITADO BALANCIN , ESTANDO DICHOS RODILLOS LIGERAMENTE DESFASADOS EN ALTURA, DE MANERA QUE MIENTRAS UNO DE ELLOS APOYA SOBRE LA SUPERFICIE EXTERNA DEL CANAL DE UNA LEVA PLANA, EL OTRO LO HACE SOBRE LA CARA INTERNA DEL CITADO CANAL DE LA LEVA CORRESPONDIENTE. ANALOGO DESFASE VERTICAL EXISTE ENTRE LOS RODILLOS QUE RELACIONAN EL BALANCIN CON EL EJE Y LAS CARAS SUPERIOR E INFERIOR DEL CASQUILLO A TRAVES DEL QUE RECIBE EL MOVIMIENTO EL EJE DEL BALANCIN , EXISTIENDO ADEMAS UN TOPE FIJO PARA LOS RODILLOS…
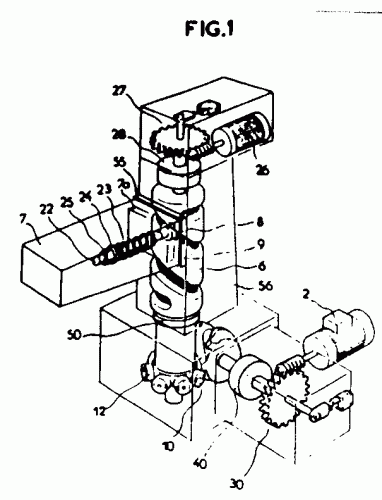
MANIPULADOR MECANICO DE EJES MULTIPLES CON CARRERA REGULABLE Y PROTECCION CONTRA SOBRECARGAS.
(16/08/1990). Ver ilustración. Solicitante/s: SOCIETE S.O.P.A.P. SA. Inventor/es: FREYWISS, ERIC.
MANIPULADOR MECANICO DE EJES MULTIPLES CON CARRERA REGULABLE Y PROTECCION CONTRA SOBRECARGAS. EL MOVIMIENTO ES TRANSMITIDO L MECANISMO DE POSICIONAMIENTO POR LA COMBINACION DE UN MOTOR-FRENO , DE UN REDUCTOR DE RUEDA Y TORNILLO SIN FIN Y DE UN LIMITADOR DE PAR AJUSTABLE . SE DETERMINA LA LEY DE MOVIMIENTO DEL MECANISMO DE POSICIONAMIENTO PARA OBTENER UNA VELOCIDAD CONSTANTE EN UNA AMPLIA BANDA, CON PUNTOS DE PARADA EVENTUALES. LA CONEXION DEL BASTIDOR GIRATORIO CON EL MECANISMO DE POSICIONAMIENTO SE OBTIENE POR MEDIO DE UN CAJETIN DE MUELLES . EL MOVIMIENTO ES TRANSMITIDO A LA LEVA CILINDRICA POR MEDIO DE UN LIMITADOR DE PAR AJUSTABLE . EL DESPLAZAMIENTO DEL BRAZO MANIPULADOR SE EFECTUA POR MEDIO DE UNA PLETINA PROVISTA DE MUELLES QUE PERMITE UN RETROCESO ANGULAR MOMENTANEO DEL BRAZO CUANDO SE ENCUENTRA CON UN OBSTACULO. EL MANIPULADOR TIENE APLICACION EN LA MANUTENCION DE CARGAS DE PIEZAS.
ROBOT DE BRAZO ARTICULADO.
(16/05/1988). Solicitante/s: ROBERT BOSCH GMNH. Inventor/es: GOSDOWSKI, GERHARD.
ROBOT DE BRAZO ARTICULADO CON AL MENOS DOS BRAZOS ARTICULADOS Y ACCIONAMIENTOS DE ARTICULACION A MOTOR, CUYOS MOTORES SE ASIENTAN, RESPECTIVAMENTE, EN UNA PARTE ARTICULADA DE UN EJE ARTICULADO . SEGUN LA PRESENTE INVENCION, AL MENOS UN BRAZO ARTICULADO ESTA CONFIGURADO SIN MOTOR. LOS MOTORES DE LOS DOS EJES ARTICULADOS ADJUDICADOS A ESTE BRAZO ARTICULADO ESTAN FIJADOS, RESPECTIVAMENTE, EN UNA PARTE ARTICULADA VECINA. DE ESTA MANERA SE SIMPLIFICA LA INSTALACION Y SE FACILITA EL MONTAJE.
{kind=link}
{kind=link}
{kind=link}