MEJORAS INTRODUCIDAS EN UNA UNIDAD DE GIRO INTERMITENTE.
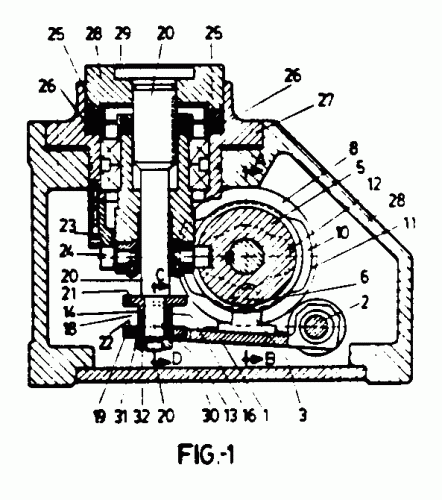
MEJORAS INTRODUCIDAS EN UNA UNIDAD DE GIRO INTERMITENTE. CONSISTE EN RELACIONAR EL BALANCIN (1) DE TRANSMISION DE MOVIMIENTO AL EJE DE SALIDA (20) CON LAS LEVAS PLANAS (8) Y 99) A TRAVES DE RODILLOS (6) Y (7) MONTADOS SOBRE OREJETAS LATERALES (3) Y (4) DEL CITADO BALANCIN (1),
ESTANDO DICHOS RODILLOS LIGERAMENTE DESFASADOS EN ALTURA, DE MANERA QUE MIENTRAS UNO DE ELLOS APOYA SOBRE LA SUPERFICIE EXTERNA (11) DEL CANAL (10) DE UNA LEVA PLANA, EL OTRO LO HACE SOBRE LA CARA INTERNA (12) DEL CITADO CANAL (10) DE LA LEVA CORRESPONDIENTE. ANALOGO DESFASE VERTICAL EXISTE ENTRE LOS RODILLOS (16-17) QUE RELACIONAN EL BALANCIN (1) CON EL EJE (20) Y LAS CARAS SUPERIOR (21) E INFERIOR (22) DEL CASQUILLO (19) A TRAVES DEL QUE RECIBE EL MOVIMIENTO EL EJE (20) DEL BALANCIN (1), EXISTIENDO ADEMAS UN TOPE FIJO (23) PARA LOS RODILLOS (24) QUE ACTUAN SOBRE LA LEVA DE PERFIL GLOBICO (5) E INCORPORANDO EL EJE (20) A NIVEL SUPERIOR DOS DISCOS DENTADOS (25) Y (26), UNO ASOCIADO AL EJE (20) Y OTRO AL SOPORTE DEL MISMO, QUE DETERMINAN UN EMBRAGUE QUE BLOQUEA AL EJE (20) EN SENTIDO GIRATORIO CUANDO ESTE ADOPTA UNA SITUACION LIMITE INFERIOR, SITUACION EN LA QUE ES FACTIBLE NO OBSTANTE UN EVENTUAL DESEMBRAGUE MEDIANTE DESPLAZAMIENTO AXIAL DEL EJE (20) EN CONTRA DE MUELLES TRONCOCONICOS (30).
Tipo: Resumen de patente/invención.
Solicitante: FAGOR, S.COOP. LTDA.,.
Nacionalidad solicitante: España.
Provincia: GUIPÚZCOA.
Inventor/es: UGARTE OJANGUREN, JOSE MARIA.
Fecha de Solicitud: 26 de Marzo de 1991.
Fecha de Publicación: .
Fecha de Concesión: 10 de Junio de 1992.
Clasificación Internacional de Patentes:
- B25J9/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › por rotación de un brazo al menos, excluyendo el movimiento de la mano, p. ej. del tipo coordenadas cilíndricas o coordenadas polares.
- B25J9/10 B25J 9/00 […] › caracterizado por los medios para regular la posición de los elementos del manipulador.
- F16H25/02 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 25/00 Transmisiones que implican esencialmente y únicamente sistemas de leva y ruleta o mecanismos de tornillo y tuerca. › estando los movimientos de dos o varios órganos independientes móviles combinados en un movimiento único.
- F16H53/00 F16H […] › Levas o ruletas seguidoras de levas, p. ej. rodillos para mecanismos de transmisión.
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 13 de Mayo de 2020, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; un segundo eslabón acoplado […]
Sistema para establecer y/o mantener el alineamiento correcto de un mecanismo de transferencia robótica, del 6 de Mayo de 2020, de BIOMERIEUX, INC.: Un sistema de alineamiento para establecer y/o mantener el alineamiento de un mecanismo automatizado de transferencia robotizada en un sistema automatizado […]
Robot de instalación de revestimiento, en particular robot de manipulación, del 4 de Septiembre de 2019, de Dürr Systems AG: Robot de instalación de revestimiento, en particular como robot de manipulación para abrir o cerrar una carrocería de vehículo automóvil […]
Tubo hinchable de geometría variable y volumen constante, brazo robotizado y robot, del 22 de Mayo de 2019, de Warein: Tubo hinchable de geometría variable y volumen constante, comprendiendo una envoltura hinchable de material flexible impermeable y poseyendo […]
Dispositivo para el posicionamiento tridimensional de un componente de acoplamiento y sistema de actuadores, del 27 de Marzo de 2019, de AIRBUS HELICOPTERS DEUTSCHLAND GmbH: Dispositivo para el posicionamiento tridimensional de un componente (KK) de acoplamiento que es parte de una estructura (KS) de acoplamiento accionada […]
Seguridad de un robot de carácter humanoide, del 3 de Diciembre de 2018, de Softbank Robotics Europe: Robot de carácter humanoide (10; 10') que comprende dos elementos y una articulación de al menos un grado de libertad que une […]
Exoesqueleto y método para proporcionar un par de asistencia a un brazo de un usuario, del 23 de Noviembre de 2018, de Ekso Bionics, Inc: Un exoesqueleto que comprende: un primer eslabón configurado para pivotar en un plano transversal alrededor de un primer eje vertical; […]