9 inventos, patentes y modelos de ZIMMER, ERNST
INSTALACION DE REBORDEAR CON ELEMENTOS DE APRIETE Y SUJECION.
Sección de la CIP Técnicas industriales diversas y transportes
(16/02/2002). Solicitante/s: KUKA SCHWEISSANLAGEN GMBH. Clasificación: B21D39/02.
Instalación de rebordear con un dispositivo de rebordear exterior y/o un dispositivo de rebordear interior así como con un mecanismo de sujeción con elementos de apriete y sujeción, caracterizada porque el mecanismo de sujeción presenta uno o varios elementos de apriete y sujeción adelantados.
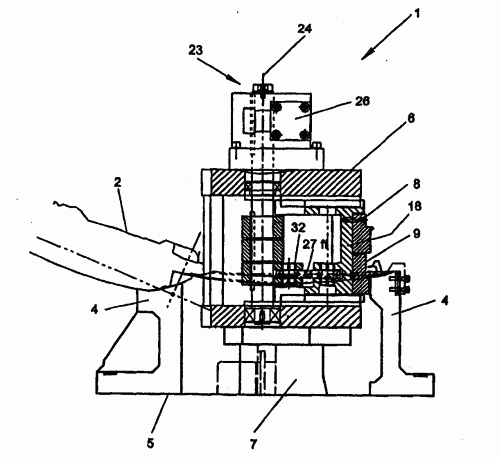
DISPOSITIVO DE REBORDEADO.
Sección de la CIP Técnicas industriales diversas y transportes
(01/07/2000). Ver ilustración. Solicitante/s: KUKA SCHWEISSANLAGEN GMBH. Clasificación: B21D39/02.
LA INVENCION ESTA RELACIONADA CON UN DISPOSITIVO DE REBORDEADO CON UNA CABEZA DE REBORDEADO QUE PRESENTA HERRAMIENTAS DE REBORDEADO DIVIDIDAS EN UNO O VARIOS SEGMENTOS (12 A 16) Y DOTADAS DE UN CANTO DE REBORDEADO CONTINUO EN POSICION DE FUNCIONAMIENTO. EL DISPOSITIVO DE REBORDEADO POSEE, ADEMAS, UN MECANISMO DE ACCIONAMIENTO DE ELEVACION PARA LA GENERACION DEL TRAZADO DE REBORDEADO Y UN DISPOSITIVO DE AJUSTE PARA LA ENTRADA Y SALIDA DE LOS SEGMENTOS (12 A 16), QUE POSEE UN MECANISMO DE ACCIONAMIENTO DE AJUSTE QUE MUEVE SIMULTANEAMENTE TODOS LOS SEGMENTOS (12 A 16). LOS SEGMENTOS POSEEN SUPERFICIES DE CONTACTO ADAPTADAS CON UN ANGULO ORTOGONAL (AL) DE 20(SUP,0) A 50(SUP,0). EL MECANISMO DE ACCIONAMIENTO DE AJUSTE SE CONFIGURA, PREFERENTEMENTE, COMO MECANISMO DE BIELA Y MANIVELA.
MANIPULADOR DE VARIOS EJES.
Sección de la CIP Técnicas industriales diversas y transportes
(01/08/1996). Solicitante/s: KUKA ROBOTER GMBH. Clasificación: B25J19/00, B25J9/10, B25J9/00, B25J9/04.
LA INVENCION SE REFIERE A UN MANIPULADOR DE VARIOS EJES, CON UN BASTIDOR Y UN PLATO HORIZONTAL ACCIONADO Y DISPUESTO SOBRE EL MISMO EN TORNO A UN EJE BASICO GIRATORIO . EL BASTIDOR PRESENTA UNA COLUMNA DE APOYO CENTRAL, CONCEBIDA COMO APOYO DEL PAR Y DEL RODAMIENTO DEL PLATO HORIZONTAL . EL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SE HA DISPUESTO ESENCIALMENTE A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL , EN EL QUE EL MOTOR ESTA SITUADO SOBRE EL PLATO HORIZONTAL , Y LA PARTE DEL ACCIONAMIENTO DE LA TRANSMISION , ESTA DISPUESTA A LA ALTURA O ENCIMA DE LA PLACA BASE DEL PLATO HORIZONTAL . CON ESTA ESTRUCTURA, LAS PARTES DEL ACCIONAMIENTO PARA EL PLATO HORIZONTAL SON MAS ACCESIBLES PARA FINES DE MONTAJE Y DE MANTENIMIENTO, POR LO QUE SE OBTIENE TAMBIEN PARA EL RODAMIENTO UN ANCHO DE APOYO RELATIVAMENTE REDUCIDO Y CON ELLO UN AHORRO DE ESPACIO.
ESTACION DE MECANIZACION PARA PIEZAS, EN PARTICULAR CARROCERIAS DE VEHICULOS, EN UNA LINEA TRANSFER.
Sección de la CIP Técnicas industriales diversas y transportes
(01/10/1995). Solicitante/s: KUKA SCHWEISSANLAGEN & ROBOTER GMBH. Clasificación: B62D65/00.
LA INVENCION SE REFIERE A UNA ESTACION DE PROCESADO PARA PIEZAS, EN PARTICULAR, CARROCERIAS DE VEHICULOS EN UNA LINEA TRANSFER . BASTIDORES DE SUJECION INTERCAMBIABLES ESTAN ALMACENADOS EN DEPOSITOS , PARA LO CUAL LOS DEPOSITOS ESTAN DISPUESTOS EN RELACION A LA DIRECCION DE LA LINEA TRANSFER EN LOS DOS LADOS DELANTE Y/O DETRAS DEL PUESTO DE TRABAJO . EN UN PUESTO DE TRABAJO ESTA SITUADO LATERALMENTE A LA LINEA TRANSFER POR LO MENOS UN DISPOSITIVO DE PROCESADO . LOS DEPOSITOS ESTAN FORMADOS CON PREFERENCIA COMO DEPOSITOS DE TAMBOR GIRATORIOS Y VERTICALES Y UNIDOS POR PARES MEDIANTE UN DISPOSITIVO DE TRANSPORTE COMUN . CON ELLO ES POSIBLE EN UN MOVIMIENTO CARGAR EL ANTIGUO BASTIDOR DE SUJECION DESDE EL PUESTO DE TRABAJO EN UN DEPOSITO Y AL MISMO TIEMPO LLEVAR AL PUESTO DE TRABAJO UN NUEVO BASTIDOR DE SUJECION DESDE EL OTRO DEPOSITO.
ROBOT INDUSTRIAL DE EJES MULTIPLES.
(16/04/1994) SE PRESENTA UN ROBOR INDUSTRIAL DE EJES MULTIPLES QUE CONSISTE EN UNA ESTRUCTURA DE BANCADA , UNA PALANCA OSCILANTE QUE PUEDE GIRAR Y OSCILAR, UNA PLUMA SALIENTE OSCILANTE Y UNA MANO DE ROBOT DE MIEMBROS MULTIPLES QUE PUEDE GIRAR Y OSCILAR Y CUYOS MIEMBROS ESTAN GUIADOS POR MOTORES DISPUESTOS EN LA PLUMA SALIENTE . LA PLUMA SALIENTE ESTA MONTADA EN UN LADO DE LA PALANCA OSCILANTE CON BRAZO CON AL MENOS DOS MOTORES QUE SE ENCUENTRAN DISPUESTOS EN LOS LADOS DE LA PLUMA SALIENTE EN LA DIRECCION DE EJES OSCILANTES . EN LA EJECUCION CON UN TERCER MOTOR, LOS MOTORES ESTAN DISPUESTOS CON SUS EJES EN UN TRIANGULO DE LADOS CORTOS QUE SON LA BASE DE LOS COJINETES DE LA PLUMA SALIENTE . ALTERNATIVAMENTE, LOS MOTORES SE ENCUENTRAN DISPUESTOS CON SU LADO DE GUIA ENFRENTADOS A LA MANO DEL…
HERRAMIENTA DE SOLDADURA PARA SOLDADURA POR PUNTOS CON MANIPULADORES DE VARIOS EJES.
Sección de la CIP Técnicas industriales diversas y transportes
(01/02/1994). Solicitante/s: KUKA SCHWEISSANLAGEN & ROBOTER GMBH. Clasificación: B23K11/31.
LA INVENCION HACE REFERENCIA A UNA HERRAMIENTA DE SOLDADURA POR PUNTOS CON MANIPULADORES DE VARIOS EJES. EL ELECTRODO PARA SOLDADURA ESTA DISPUESTO EN UNA PINZA PORTAELECTRODO , ALREDEDOR DE VARIOS EJES SOBRE UN SOPORTE GIRATORIO , LO QUE MUESTRA UNO O VARIOS MECANISMOS DE RETROCESO. LA PINZA PORTAELECTRODOS ESTA POR SU PARTE UNIDA A LA MANO MANIPULADORA. EL SOPORTE POSEE PREFERENTEMENTE DOS EJES PRINCIPALES GIRATORIOS , QUE SE AJUSTAN PERPENDICULARMENTE JUNTOS CON RESPECTO AL EJE LONGITUDINAL DEL ELECTRODO PARA SOLDADURA . LA PINZA PORTAELECTRODOS PRESENTA POSTERIORMENTE UN MECANISMO DE PRUEBA DE ELECTRODOS , EL CUAL SE DISPONE ENTRE EL ELECTRODO PARA SOLDADURA Y EL SOPORTE.
Sección de la CIP Técnicas industriales diversas y transportes
(16/05/1993). Solicitante/s: KUKA SCHWEISSANLAGEN & ROBOTER GMBH. Clasificación: B23K9/12, B23K9/28.
EL INVENTO SE REFIERE A UN SOPLETE DE SOLDADURA QUE PRESENTA UN ACCIONADOR DE CABLE UN FUSIBLE DE DESCONEXION. EL FUSIBLE DE DESCONEXION SE DISPONE EN LA DIRECCION DE TRANSPORTE DE CABLE DELANTE DEL ACCIONADOR DE CABLE. EN PARTES MOVILES DEL FUSIBLE DE DESCONEXION, COMO UN TAMBOR DE EXCENTRICA SE ALOJAN COLGABLES EL ACCIONADOR DE CABLE Y EL TUBO DEL SOPORTE. EL FUSIBLE DE DESCONEXION SE CONECTA PROXIMO A UNOS MANIPULADORES . EN EL ACCIONADOR DE CABLE PUEDE DISPONERSE GRUPOS ADICIONALES SENSORES DE SOLDADURA EN UNAS POSICIONES DE CORTE DEFINIDAS.
CABEZA DE TRANSMISION PARA MANIPULADORES.
Sección de la CIP Técnicas industriales diversas y transportes
(01/08/1988). Solicitante/s: KUKA SCHWEISSANLAGEN & ROBOTER GMBH. Clasificación: B25J17/02.
EL INVENTO CONCIERNE A LA EJECUCION DE ACCIONAMIENTO DE UNA CABEZA DE TRANSMISION DE VARIAS PARTES DE UN MANIPULADOR, CONOCIDA POR LA FIGURA DE LA DE-OS 34 28 748. SEGUN ELLA, TRES PARTES DE CABEZA , DISPUESTAS EN FILA, ESTAN APOYADAS UNA JUNTO A OTRA A LO LARGO DE EJES INCLINADOS , ESTANDO PREVISTO EN EL TREN DE ACCIONAMIENTO INDIVIDUAL, EN EL LADO DE SALIDA DE FUERZA, SENDOS ENGRANAJES FUERTEMENTE REDUCTORES, POR EJEMPLO ENGRANAJES DIFERENCIALES DE ACCIONAMIENTO ARMONICO. CON EL FIN DE CONSEGUIR MOVIMIENTOS DE GIRO UNIFORMES Y POR LO TANTO MAS FACILMENTE ANALIZABLES DE LA PARTE CENTRAL Y ANTERIOR DE CABEZA , SE PROPONE ELEGIR UNA REDUCCION (X) PARA UNO DE LOS DOS ENGRANAJES REDUCTORES QUE ESTAN ASOCIADOS A LA CABEZA DE TRANSMISION CENTRAL ASI COMO ANTERIOR , Y UNA REDUCCION (X-1) PARA EL OTRO DE LOS DOS ENGRANAJES REDUCTORES.
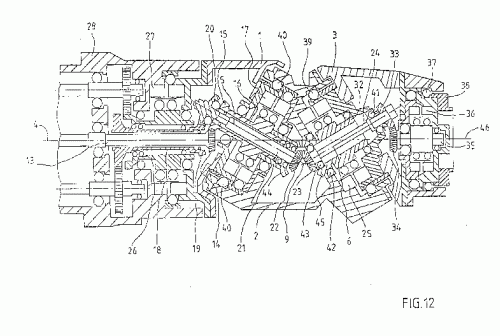
CABEZA DE TRANSMISION PARA MANIPULADORES.
Sección de la CIP Técnicas industriales diversas y transportes
(16/03/1988). Ver ilustración. Solicitante/s: SCHWISSANLAGEN, KUKA ROBOTER GMBH. Clasificación: B25J17/00.
LA CABEZA DE TRANSMISION DESCRITA COMPRENDE UNA DISPOSICION DE TRANSMISION CON TRES ARBOLES CONCENTRICOS DE ACCIONAMIENTO Y CUATRO MOVIMIENTOS DE GIRO DE LA TRES PARTES DE LA CABEZA, PRESENTANDO DICHA DISPOSICION ARBOLES HUECOS UNIDOS ENTRE SI A LO LARGO DE EJES OBLICUOS , CON LO CUAL SE PUEDE INDUCIR DESDE UN MOTOR EL MOVIMIENTO ROTATIVO SIMULTANEO EN SENTIDOS CONTRARIOS DE LAS PARTES CENTRAL Y POSTERIOR DE LA CABEZA. EN DICHA PARTE POSTERIOR HAY UN ARBOL PROPULSOR GIRATORIO QUE VA UNIDO CON EL PORTAHERRAMIENTAS Y QUE RECIBE SU ACCIONAMIENTO DE UN TREN DE TRANSMISION GUIADO A TRAVES DE LOS ARBOLES HUECOS . LA CABEZA DE TRANSMISION DEL INVENTO ES PARTICULARMENTE ADECUADA PARA MANIPULADORES DE PIEZAS DEL TIPO DE ROBOTS EN LA INDUSTRIA DEL AUTOMOVIL Y OTRAS.
{kind=link}
{kind=link}