Procedimiento para la conducción longitudinal de un vehículo comprendiendo un sistema adaptativo de conducción longitudinal (sistema ACC).
Procedimiento para la conducción longitudinal automática de un vehículo motorizado,
incluyendo un sistema de conducción longitudinal adaptativa (sistema ACC), siendo obtenidas informaciones por parte de un dispositivo de control del sistema de conducción longitudinal referentes a las distancias a múltiples vehículos motorizados precedentes y referentes a las velocidades respectivas de dichos vehículos motorizados y la respectiva aceleración de dichos vehículos motorizados, produciendo la conducción longitudinal del vehículo motorizado en función de las informaciones obtenidas y de las aceleraciones obtenidas.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10005008.
Solicitante: AUDI AG.
Nacionalidad solicitante: Alemania.
Dirección: 85045 INGOLSTADT ALEMANIA.
Inventor/es: STAUDTE,CARMEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W30/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 30/00 Funciones de sistemas de ayuda a la conducción de vehículos terrestres no relacionados con el control de una subunidad particular, p.ej. sistemas que utilizan el control conjugado de varias subunidades del vehículo. › Anticipación o prevención de colisiones probables o inminentes.
- B60W30/16 B60W 30/00 […] › Control de la distancia entre vehículos, p. ej. para mantener una distancia con el vehículo que le precede.
- B60W50/00 B60W […] › Detalles de los sistemas de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular.
- G01S13/93 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para anticolisión.
- G08G1/16 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › Sistemas anticolisión.
PDF original: ES-2533621_T3.pdf
Fragmento de la descripción:
Procedimiento para la conducción longitudinal de un vehículo comprendiendo un sistema adaptativo de conducción longitudinal (sistema ACC)
La invención se refiere a un procedimiento para la conducción longitudinal de un vehículo comprendiendo un sistema adaptativo de conducción longitudinal (sistema ACC).
Un sistema adaptativo de conducción longitudinal, habitualmente también sistema ACC (ACC = adaptative cruise control) se usa para la conducción longitudinal del propio vehículo motorizado respecto de un vehículo inmediatamente precedente. Mediante sensores apropiados, habitualmente radares sensores se obtienen informaciones respecto de este vehículo precedente, habitualmente al menos la distancia real, siendo el vehículo propio acelerado o desacelerado teniendo en cuenta las informaciones obtenidas, de tal manera que, por regla general, se dé o se cumpla siempre una distancia mínima dependiente de la situación. El vehículo propio también puede ser frenado hasta la detención por medio del sistema de conducción longitudinal. La función de un sistema de conducción longitudinal o sistema ACC es básicamente conocido hace tiempo. En los sistemas conocidos se regula siempre solamente respecto del vehículo inmediatamente precedente, es decir que la estrategia de regulación del comportamiento de aceleración y desaceleración del propio vehículo es determinada siempre respetando la distancia y, dado el caso, otros parámetros respecto del vehículo inmediatamente precedente. Ello lleva, particularmente en el tránsito stop&go en el sector de detención o en situaciones de embotellamiento, a una manera conductiva irregular que se compone de una constante aceleración y frenado, lo que, a su vez, provoca una manera conductiva con un consumo de energía incrementado, sea gasolina, diesel o electricidad.
El documento DE 102 56 529 A muestra un procedimiento para la conducción longitudinal automática de un vehículo motorizado incluyendo un sistema de conducción longitudinal adaptativa (sistema ACC), siendo obtenidas informaciones por parte de un dispositivo de control del sistema de conducción longitudinal referentes a las distancias a múltiples vehículos motorizados precedentes y referentes a sus velocidades respectivas y produciendo en función de las informaciones obtenidas la conducción longitudinal del vehículo motorizado.
Es así que la invención se basa en el problema de Indicar un procedimiento para la conducción longitudinal automática que permita una conducción longitudinal confortable y de menor consumo de energía.
Para solucionar el problema se ha previsto en el procedimiento del tipo mencionado al comienzo que por parte del dispositivo de control del sistema de conducción longitudinal se registren Informaciones respecto de las distancias a varios vehículos precedentes, referidas a la velocidades respectivas de dichos vehículos motorizados y la aceleración respectiva de estos vehículos motorizados y en función de las Informaciones obtenidas y la aceleración obtenida se produzca la conducción longitudinal del vehículo motorizado.
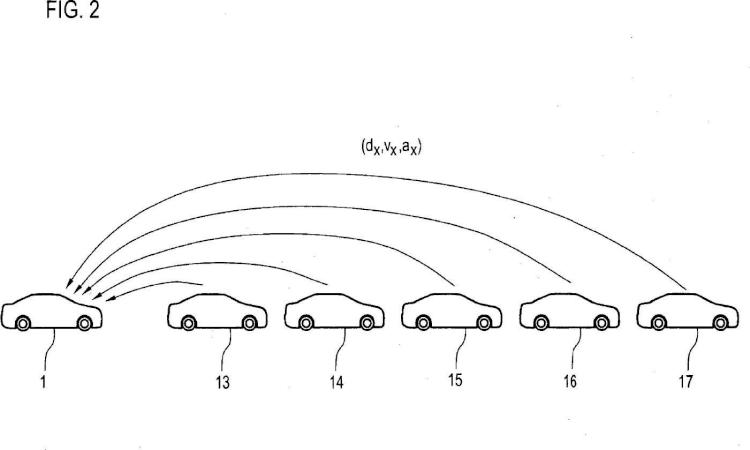
En el margen del procedimiento según la invención, para la conducción longitudinal del vehículo motorizado propio se registra con particular ventaja el comportamiento no solamente del vehículo Inmediatamente precedente sino de múltiples vehículos precedentes, registrando respecto de cada uno de los vehículos motorizados a tener en cuenta la distancia real al vehículo propio, la velocidad respectiva de cada vehículo y la respectiva aceleración de cada uno de estos vehículos. O sea, previendo se determina el comportamiento de la caravana, estando la caravana definida por múltiples vehículos precedentes al vehículo propio, en particular al menos tres, preferentemente cinco vehículos motorizados. Ello hace que el comportamiento de otros vehículos que se encuentran más adelante del vehículo propio, y cuyo comportamiento es causal para el comportamiento del vehículo que se encuentra Inmediatamente delante del vehículo propio, se incorpore a la estrategia de regulación. Si, por ejemplo, el quinto vehículo adelantado ya frena nuevamente, mientras que los vehículos uno a cuatro todavía aceleran para cerrar espacios, este hecho se registra en el margen del procedimiento según la invención. De allí ya se deduce muy tempranamente que a la brevedad se debe contar también con un proceso de frenado del vehículo Inmediatamente precedente. La estrategia de regulación del vehículo propio es adaptada de tal manera que el vehículo propio no acelere demasiado sino que marche de manera relativamente uniforme y más bien lenta y siga con dinámica reducida a los demás vehículos. O sea, se evitan procesos innecesarios de aceleración y frenado. Si, por ejemplo, acelera el tercer vehículo precedente mientras el vehículo inmediatamente precedente y el segundo vehículo precedente al vehículo propio todavía están parados, debe contarse con un consecuente arranque Inmediato de ambos vehículos. SI, por ejemplo, el vehículo propio todavía rueda acercándose al vehículo inmediatamente precedente, al saber que el tercer vehículo ya arranca nuevamente es posible evitar un frenado completo, sino que es, a ser posible, desacelerado de manera uniforme y, después de registrar el arranque del vehículo inmediatamente precedente, acelerado nueva y lentamente sin haber desacelerado completamente.
Visiblemente, debido a la obtención del "comportamiento de caravana", el procedimiento según la Invención brinda la posibilidad de Incorporar sustancialmente mayor información a la estrategia de regulación lo que, a su vez, posibilita registrar o respectivamente desviar las situaciones inmediatamente inminentes que por su parte son causales de un funcionamiento de regulación confortable y ahorrativo de energía del vehículo propio. La distancia del vehículo Inmediatamente precedente no permanecerá, forzosamente, Igual, ya que influye el comportamiento de los demás
vehículos precedentes; sólo es posible, en su totalidad, un desarrollo sustancialmente más suave de la regulación que posibilita procesos de frenado y aceleración en otros instantes y con otras intensidades que hasta el presente.
Como ya se ha descrito, es apropiado obtener la información referente a al menos tres, particularmente a al menos cinco vehículos precedentes, a ser posible también más, en tanto lo permitan los medios de registro.
Apropiadamente, el control se produce de tal manera que respecto del vehículo inmediatamente precedente se mantenga, independientemente de las informaciones obtenidas, siempre una distancia mínima que, sin embargo, es variable acorde a la situación. Además, cuando por ejemplo el vehículo motorizado propio se aproxima al vehículo parado inmediatamente precedente, pero es sabido que el segundo y tercer vehículo precedente ya ha arrancado nuevamente, se evita que se produzca una aproximación exagerada por cuanto no es seguro que el conductor del vehículo inmediatamente precedente también arranque inmediatamente.
Las informaciones pueden obtenerse de diferentes maneras. Una primera alternativa de la invención prevé obtener las informaciones mediante radares sensores previstos en el lado de vehículo. Los radares sensores tienen una zona de detección de 100 - 200 m aproximadamente. Se ha demostrado que es posible, sin más, obtener informaciones respectivamente señales de reflexión de segundos, terceros, cuartos o quintos vehículos precedentes, después que las señales de radar son conducidas, parcialmente, también debajo de los diferentes vehículos, es decir que no son apantallados por vehículos que se encuentran en medio. Die Steuerungseinrichtung ist im Stande, die einzelnen Sígnale selbstverstándlich fahrzeugspezifisch zu differenzieren, mithin also dem jeweiligen zweiten, dritten, vierten etc.
Alternativamente al uso de radares sensores o adicionalmente también es posible usar un dispositivo receptor del lado del vehículo que permita una comunicación a un dispositivo externo de transmisión de informaciones. Una comunicación de este tipo sería, por ejemplo, una comunicación car-to-car. Con ello se entiende un sistema casi WLAN, o sea un sistema de comunicación por medio del cual los vehículos se pueden comunicar directamente entre sí cuando se encuentran dentro de la zona de transmisión de señales. Los vehículos motorizados que están en condiciones para ello disponen de dispositivos combinados de emisión y recepción que permiten la transmisión de datos. O sea, es posible que el vehículo propio reciba informaciones directamente de los vehículos precedentes por medio de su dispositivo de recepción. Naturalmente, estos vehículos "conocen" su propia velocidad y su propio comportamiento de aceleración y,... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para la conducción longitudinal automática de un vehículo motorizado, incluyendo un sistema de conducción longitudinal adaptativa (sistema ACC), siendo obtenidas informaciones por parte de un dispositivo de control del sistema de conducción longitudinal referentes a las distancias a múltiples vehículos motorizados precedentes y referentes a las velocidades respectivas de dichos vehículos motorizados y la respectiva aceleración de dichos vehículos motorizados, produciendo la conducción longitudinal del vehículo motorizado en función de las informaciones obtenidas y de las aceleraciones obtenidas.
2. Procedimiento según la reivindicación 1, caracterizado por que se obtienen las informaciones respecto de al menos tres, particularmente al menos cinco vehículos motorizados precedentes.
3. Procedimiento según las reivindicaciones 1 o 2, caracterizado por que el control se produce de tal manera que respecto del vehículo inmediatamente precedente se mantiene siempre una distancia mínima, independientemente de las informaciones obtenidas.
4. Procedimiento según las reivindicaciones precedentes, caracterizado por que las informaciones son obtenidas mediante radares sensores previstos en el lado de vehículo y/o mediante un dispositivo de recepción previsto en el lado de vehículo que permiten una comunicación con un dispositivo externo de transmisión de informaciones.
5. Procedimiento según una de las reivindicaciones precedentes, caracterizado por que en el margen del procesamiento de informaciones se obtiene, en base a las informaciones obtenidas respecto de la velocidad respectiva de los vehículos motorizados precedentes, un valor de cálculo que es una medida para el movimiento de la caravana formada de vehículos precedentes, considerado dentro del margen del control.
6. Procedimiento según la reivindicación 5, caracterizado por que el valor medio se forma como valor de cálculo.
7. Procedimiento según las reivindicaciones precedentes, caracterizado por que mediante al menos una información que representa una medida para el itinerario futuro del vehículo motorizado, se determina el itinerario futuro y, resultando de ello, un corredor de itinerario en el cual se encuentran los vehículos motorizados precedentes.
8. Procedimiento según la reivindicación 7, caracterizado por que como información se obtienen y procesan al menos un parámetro de trabajo del vehículo motorizado, en particular la tasa de guiñada o el ángulo de giro y/o datos predictivos de itinerario y/o los datos de imágenes del campo delante del vehículo tomadas mediante una cámara.
9. Procedimiento según una de las reivindicaciones precedentes, caracterizado por que el control del vehículo motorizado se produce por medio del sistema de conducción longitudinal en el caso de una aceleración teniendo en cuenta la emisión de contaminantes debida a la aceleración, en particular la emisión de CO2.
10. Procedimiento según una de las reivindicaciones precedentes, caracterizado por que el control del vehículo motorizado se produce por medio del sistema de conducción longitudinal teniendo en cuenta el desarrollo del itinerario.
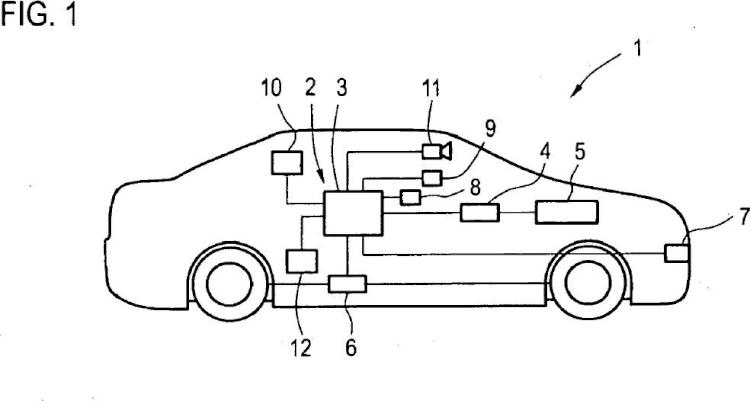
11. Vehículo motorizado, incluyendo un sistema adaptativo de conducción longitudinal (2) con un dispositivo de control (3) pudiendo mediante el dispositivo de control (3) obtener informaciones referentes a las distancias a varios vehículos precedentes (13, 14, 15, 16, 17) con relación a las velocidades respectivas de dichos vehículos motorizados (13, 14, 15, 16, 17) y la aceleración respectiva de dichos vehículos motorizados (13, 1, 15, 16, 17), siendo el vehículo motorizado (1) controlable en función de las informaciones obtenidas y de las aceleraciones obtenidas.
12. Vehículo motorizado según la reivindicación 11, caracterizado por que el dispositivo de control (3) está configurado para la obtención diferenciada de al menos tres, particularmente al menos cinco vehículos motorizados (13, 14, 15, 16, 17) precedentes.
13. Vehículo motorizado según las reivindicaciones 11 o 12, caracterizado por que el dispositivo de control (3) se produce de tal manera que respecto del vehículo (13) inmediatamente precedente se mantiene, independientemente de las informaciones obtenidas, siempre una distancia mínima.
14. Vehículo motorizado según una de las reivindicaciones 11 a 13, caracterizado por que se han previsto para la obtención de informaciones radares sensores (7) en el lado de vehículo y/o un dispositivo de recepción (8) que permiten una comunicación a un dispositivo externo de transmisión de informaciones.
15. Vehículo motorizado según una de las reivindicaciones 11 a 14, caracterizado por que el dispositivo de control (3) está configurado para la obtención del itinerario futuro y, como resultado de ello, de un corredor de itinerario en el cual se encuentran los vehículos motorizados (13, 14, 15, 16, 17) precedentes, mediante al menos una información que representa una medida para el itinerario futuro del vehículo motorizado (1).
16. Procedimiento según la reivindicación 15, caracterizado por que como información se obtienen y procesan al menos un parámetro de trabajo del vehículo motorizado (1), en particular la tasa de guiñada o el ángulo de giro, y/o datos predictivos de itinerario y/o los datos de imágenes del campo delante del vehículo tomadas mediante una cámara.
Patentes similares o relacionadas:
DISPOSITIVO LUMÍNICO ACÚSTICO DE EMERGENCIA Y ALERTA TEMPRANA, del 30 de Julio de 2020, de CALOMARDE LORENTE, Daniel: Dispositivo lumínico acústico de emergencia y alerta temprana consistente en un conjunto de elementos destinados a informar en alerta temprana […]
Sistema anti acoso y anti colisión trasero para vehículos motorizados, del 20 de Julio de 2020, de ARBEX CALLES, Juan Ignacio: El sistema anti acoso y anti colisión trasero para vehículos motorizados, pretende disuadir, educar y si fuera necesario facilitar la identificación del infractor, […]
Procedimiento y sistema de aviso de colisión para la detección de vehículos en dirección contraria, del 24 de Junio de 2020, de Siemens Mobility GmbH: Procedimiento para la detección de vehículos de transporte en dirección contraria en un sistema de transporte con rutas fijas, que presenta las […]
Sistema de visualización de un vehículo, del 24 de Junio de 2020, de LEIA INC: Un sistema de vigilancia de vehículos que comprende: un escáner tridimensional 3D, configurado para escanear una región adyacente […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
MÉTODO Y SISTEMA PARA CONTROLAR UNA PLURALIDAD DE VEHÍCULOS AUTÓNOMOS, del 11 de Junio de 2020, de SEAT, S.A.: La presente invención se refiere a un método para controlar una pluralidad de vehículos autónomos, donde el método comprende las etapas de determinar una situación […]
DISPOSITIVO ELECTRÓNICO DE SEGURIDAD, del 20 de Marzo de 2020, de PETRONICS TECNOLOGIA S.L: Dispositivo electrónico de seguridad independiente del vehículo apto para ser fijado al vehículo que comprende una cámara de video que grava en continuo […]
Caracterización de una colisión de vehículo, del 8 de Enero de 2020, de GEOTAB Inc: En el presente documento se describen ejemplos de un sistema que procesa información que describe el movimiento de un vehículo en un momento relacionado con una posible […]