CIP-2021 : G01C 21/16 : mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
CIP-2021 › G › G01 › G01C › G01C 21/00 › G01C 21/16[3] › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S).
G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
G01C 21/16 · · · mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
CIP2021: Invenciones publicadas en esta sección.
Generación de estimación de la gravedad de la Tierra.
(03/06/2020) Un procedimiento para generar estimaciones de la gravedad de la Tierra para períodos de tiempo secuenciales, en el que el procedimiento, llevado a cabo por un aparato , comprende para cada período de tiempo:
obtener los valores de los datos de aceleración de al menos un sensor de aceleración y los valores de los datos de orientación de al menos un giroscopio durante un período de tiempo en cuestión, estando el al menos un sensor de aceleración y el al menos un giroscopio acoplados a un objeto,
generar una magnitud del cambio de orientación a partir de los valores de los datos de orientación,
determinar un valor de estabilidad para el objeto basado en los valores de los datos de aceleración y la magnitud del cambio de orientación generada a partir de los valores de los datos de orientación,…
Procedimiento y dispositivo para determinar parámetros de medición inerciales.
(06/05/2020) Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al menos dos sensores inerciales detectan cada uno el mismo parámetro de medición a detectar en los intervalos de medición que se superponen al menos parcialmente entre sí de forma independiente con diferente precisión de detección,
caracterizado porque los parámetros de medición inerciales están previstos para controlar un misil, y un valor de salida (A) corregido (A) para controlar el misil se forma (S7) a partir de los valores de los parámetros de medición detectados (S1, S2) en función de la precisión de detección de al menos un sensor inercial , donde
- un desplazamiento (d1) de un primer sensor inercial y un desplazamiento…
Método y sistema de navegación inercial asistido por GPS.
(18/03/2020) Un método de navegación inercial asistido por GPS que comprende:
proporcionar múltiples sensores que incluyen múltiples unidades de medición de inercia (IMU) y al menos un receptor y antena del sistema de posicionamiento global (GPS), dichas IMU y al menos un receptor y una antena de GPS se instalan fijamente en un cuerpo rígido, dicho al menos un receptor de GPS proporciona soluciones de posición y velocidad; y
proporcionar una computadora de navegación con software de navegación incorporado o una computadora, que no está dedicada a la navegación, sin embargo, tiene las interfaces de hardware y el software de navegación necesarios;
caracterizado por que la computadora está configurada para realizar las…
Dispositivo y procedimiento de mantenimiento de actitud de un portador que utiliza girómetros.
(18/03/2020) Dispositivo de mantenimiento de actitud de un portador, comprendiendo el dispositivo:
· tres girómetros primarios dispuestos para medir velocidades de rotación primarias (Rbc) de un portador alrededor de tres ejes primarios,
· un girómetro secundario dispuesto para medir una velocidad de rotación secundaria (Rhp) del portador alrededor de un eje secundario diferente de cada uno de los ejes primarios,
· una cámara que presenta un eje óptico diferente de cada uno de los ejes primarios,
· un módulo de tratamiento de datos configurado para
• estimar errores de factor de escala y de deriva que contaminan las velocidades de rotación primarias (Rbc),…
Procedimiento de estimación del movimiento de un peatón.
(25/12/2019) Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad angular de una extremidad inferior por unos medios de medición inercial solidarios con dicha extremidad inferior de dicho peatón y dispuestos de manera que presenten sustancialmente un movimiento de rotación con respecto a un extremo distal de dicha extremidad inferior por lo menos cuando dicho extremo distal de la extremidad inferior está en contacto con el suelo;
(b) estimar por unos medios de tratamiento de datos una velocidad de dicha extremidad inferior en función de dicha aceleración y de dicha…
Localización dentro de un entorno usando fusión de sensores.
(04/12/2019) Un aparato que comprende:
una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos de datos incluye un primer tipo de flujo de datos y un segundo tipo de flujo de datos, en donde cada punto de datos en el primer tipo de flujo de datos incluye una medición de incertidumbre, y en donde cada punto de datos en el segundo tipo de flujo de datos no incluye una medición de incertidumbre;
un modificador configurado para aplicar una distribución de probabilidad al segundo tipo de flujo de datos para formar un flujo de datos modificado; y
un estimador de pose ubicado a bordo…
Procedimiento de gestión automática de un girómetro longitudinal montado en un aparato volador.
(20/11/2019). Solicitante/s: MBDA FRANCE. Inventor/es: DE PICCIOTTO,FRANÇOIS.
Procedimiento de gestión automática de un girómetro longitudinal que está montado sobre un misil aéreo, susceptible de ser puesto en rotación, procedimiento según el cual, durante la utilización del girómetro longitudinal se controla automáticamente al citado misil de tal manera que se le pone en rotación alrededor de su eje longitudinal , alternando el sentido de la rotación, y esto de una manera regular, siendo cambiado el sentido de rotación a cada vuelta con el fin de anular el efecto del factor de escala del citado girómetro longitudinal , además de corregir las derivas, cuya corrección se obtiene mediante la puesta en rotación del misil.
PDF original: ES-2764104_T3.pdf
Ayudas de navegación para sistemas aéreos no tripulados en un entorno sin GPS.
(13/11/2019) Método para estimar una posición o trayectoria de una aeronave en un entorno sin GPS que comprende:
obtener, mediante un sistema de navegación inercial, una medida de estado de una aeronave ;
cambiar, con un filtro de navegación, un esquema de ponderación para la medida de estado de la aeronave ;
y
estimar, con el filtro de navegación, una posición o trayectoria de la aeronave basándose en el esquema de ponderación y la medida de estado;
caracterizado porque el método comprende además:
recibir una instrucción de AIDL asociada con una maniobra para la aeronave;
identificar, con una ayuda de lenguaje de descripción de intención de aeronave, la instrucción de AIDL de la aeronave que va a asociarse con un nivel de actividad dinámica de una…
Procedimiento y sistema de armonización de un marco de referencia de un posicionador angular con respecto a un marco de referencia terrestre.
(06/11/2019) Procedimiento de armonización con respecto a un marco de referencia terrestre de un marco de referencia de un posicionador angular apto para recibir un móvil o un artefacto volante, embarcando dicho posicionador angular un dispositivo de medida de informaciones inerciales de dicho móvil o artefacto volante, siendo los ejes del posicionador angular y del dispositivo de medida de informaciones inerciales paralelos, o confundidos, o teniendo entre ellos una o varias distancias angulares conocidas, comprendiendo el procedimiento:
- una etapa de obtención (E20), a partir de informaciones inerciales medidas (E10) por el dispositivo de medida durante un primer período…
Procedimiento, sistema y programa informático para determinar la orientación de un aparato.
(11/09/2019) Un procedimiento para determinar la orientación, relativa a un vehículo, de un aparato fijado al vehículo, comprendiendo el procedimiento:
registrar periódicamente datos de aceleración del aparato a lo largo de tres ejes mutuamente ortogonales en un primer intervalo de tiempo;
registrar periódicamente datos de velocidad y rumbo del aparato en un segundo intervalo de tiempo;
determinar un primer vector que corresponde a la dirección de gravedad usando los datos de aceleración;
identificar uno o más períodos de aceleración en una línea sustancialmente recta utilizando los datos de velocidad y rumbo;
seleccionar datos de aceleración correspondientes al uno o más períodos…
Recopilación y/o procesamiento de datos de múltiples sensores.
(04/09/2019) Un procedimiento, que comprende:
detectar el movimiento de un dispositivo en respuesta a la recepción de una señal desde un acelerómetro dispuesto en dicho dispositivo ;
caracterizado por que el procedimiento comprende además:
cambiar un estado de energía del acelerómetro en respuesta a la recepción de la señal desde el acelerómetro ;
cambiar un estado de energía de un giroscopio , también dispuesto en dicho dispositivo , desde un modo de suspensión a un modo operativo normal para realizar una actividad de medición en respuesta a dicha detección de dicho movimiento del dispositivo,…
Procedimiento de evaluación del diámetro de una rueda, y conjunto de evaluación asociado.
(21/08/2019). Solicitante/s: ALSTOM Transport Technologies. Inventor/es: LE-BASTARD,JEAN.
Procedimiento de evaluación de una magnitud que caracteriza el diámetro de una rueda de un vehículo cuando este está en movimiento, el procedimiento comporta las siguientes etapas:
- adquirir una primera magnitud representativa de la derivada de la aceleración angular (α"') de la rueda ;
- adquirir una segunda magnitud representativa de la derivada de la aceleración del vehículo ;
- evaluar la magnitud que caracteriza el diámetro de la rueda a partir de la primera y segunda magnitud.
PDF original: ES-2754057_T3.pdf
Filtro de Kalman modificado para la generación de correcciones de error de actitud.
(05/06/2019). Solicitante/s: THE BOEING COMPANY. Inventor/es: LI,RONGSHENG, TSAO,TUNG-CHING, NAYAK,ARUNKUMAR P.
Medio de almacenamiento legible por ordenador que comprende instrucciones ejecutables por ordenador que, cuando se ejecutan por un ordenador , provocan que el ordenador:
reciba mediciones (106B) de actitud a partir de sensores de actitud secundarios; y
genere valores de corrección de error de actitud para mediciones (106A) de actitud a partir de sensores de actitud principales basándose en las mediciones (106B) de actitud procedentes de los sensores de actitud secundarios usando ecuaciones ampliadas derivadas para un subconjunto de una pluralidad de submatrices por bloques divididas en bloques de 3x3, 3x2, 2x3 y 2x2 a partir de las matrices de 8x8 de un filtro de Kalman de 8 estados, calculándose previamente un resto de la pluralidad de submatrices por bloque.
PDF original: ES-2744473_T3.pdf
Sistema y método para estimar la velocidad de un vehículo.
(08/05/2019) Un método para estimar la velocidad de un vehículo, el método que comprende:
registrar, mediante un procesador, una velocidad de un vehículo utilizando un primer sensor en un intervalo de tiempo de una pluralidad de intervalos de tiempo;
registrar, mediante el procesador, una aceleración del vehículo utilizando un segundo sensor, y en donde la aceleración se registra en cada subintervalo del intervalo de tiempo;
obtener, mediante el procesador, una velocidad de avance y una velocidad de retroceso, del vehículo en cada subintervalo, en donde la velocidad de avance se obtiene al agregar un valor inicial de la velocidad registrada por el primer sensor con el valor integrado de la aceleración…
Navegación por estima usando sensores de proximidad.
(15/04/2019). Solicitante/s: QUALCOMM INCORPORATED. Inventor/es: SHEYNBLAT, LEONID, FORUTANPOUR,BABAK.
Un procedimiento que comprende:
determinar una ubicación de un dispositivo móvil (200A) usando una medición de ubicación absoluta;
recopilar datos de proximidad usando una pluralidad de sensores de proximidad del dispositivo móvil (200A);
determinar una posición del dispositivo móvil (200A) en relación con un usuario usando los datos de proximidad; y
determinar , basándose en la posición del dispositivo móvil (200A) en relación con el usuario , si actualizar la ubicación del dispositivo móvil usando una técnica de navegación por estima, en el que la técnica de navegación por estima comprende determinar una ubicación relativa del dispositivo móvil (200A) basándose en información indicativa del desplazamiento del dispositivo móvil (200A), en el que la ubicación relativa es relativa a la ubicación determinada usando la medición de ubicación absoluta.
PDF original: ES-2709250_T3.pdf
Procedimiento para la puesta a disposición de un vehículo definida por el usuario.
(10/04/2019) Procedimiento para la puesta a disposición definida por el usuario de un vehículo en el que el vehículo identifica autónomamente, a partir de un punto de bajada (B) de un usuario en una zona de aparcamiento, una posición de aparcamiento (C) en la zona de aparcamiento y se dirige a la misma, conduciendo el vehículo a solicitud del usuario automáticamente a un punto de transferencia (D) en la zona de aparcamiento para su uso posterior, almacenándose un trayecto recorrido dentro de la zona de aparcamiento hasta la posición de aparcamiento (C) y pudiéndose definir el punto de transferencia (D) en cualquier punto de este trayecto , caracterizado por que se almacena la posición del punto de bajada (B) en el trayecto , por que el vehículo se comunica a través de un dispositivo…
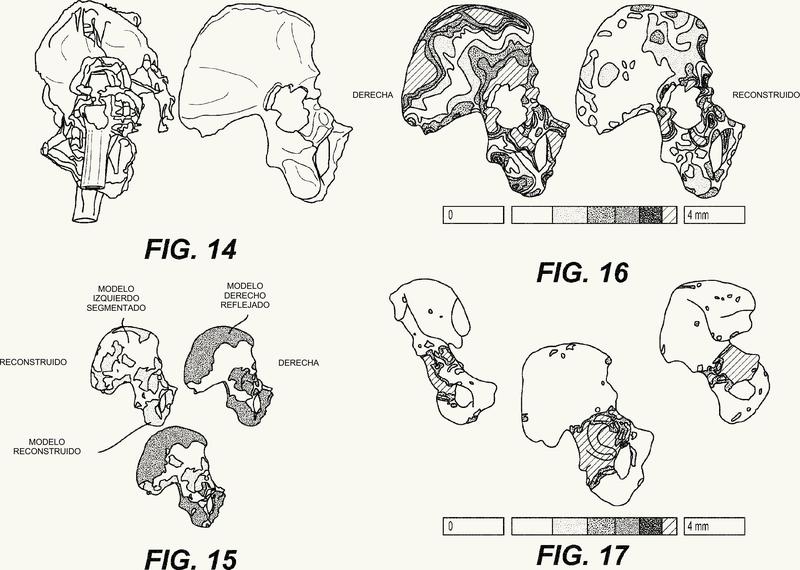
Implantes ortopédicos y de reconstrucción ósea.
(13/02/2019). Ver ilustración. Solicitante/s: Mahfouz, Mohamed R. Inventor/es: MAHFOUZ,MOHAMED R.
Un sistema de navegación quirúrgica que comprende:
una primera unidad de medición inercial (IMU);
un paquete de software que recibe datos de la primera IMU, el paquete de software incluye al menos uno de modelos precargados de diseño asistido por ordenador y modelos de superficies de diseño asistido por ordenador de una pluralidad de instrumentos quirúrgicos;
una segunda IMU que envía datos al paquete de software; y
un primer receptor de señales acoplado comunicativamente a las IMU primera y segunda, caracterizado porque la primera IMU incluye al menos tres giroscopios, al menos tres acelerómetros y al menos tres magnetómetros.
PDF original: ES-2718114_T3.pdf
Unidad de medición inercial de aeronave no tripulada.
(21/12/2018) Una unidad de medición de inercia para una aeronave no tripulada, que comprende un conjunto de alojamiento, un conjunto de detección y un amortiguador de vibraciones, estando el conjunto de detección y el amortiguador de vibraciones dispuestos en el conjunto de alojamiento, en donde:
el amortiguador de vibraciones comprende un primer cojín de atenuación de vibraciones para amortiguar vibraciones; el conjunto de detección comprende una primera placa de circuito , una segunda placa de circuito y una línea de señal flexible para conectar de forma comunicativa la primera placa de circuito y la segunda placa de circuito , un sensor de inercia se dispone de forma fija sobre la segunda placa de circuito , y la primera placa de circuito se fija sobre el conjunto de alojamiento;
la unidad de medición de inercia…
Manera energéticamente eficiente de operar sensores de movimiento.
(24/01/2018). Solicitante/s: QUALCOMM INCORPORATED. Inventor/es: KULIK,VICTOR.
Un dispositivo móvil que comprende:
un procesador del dispositivo móvil ; y
un sensor de movimiento acoplado de manera comunicativa al procesador del dispositivo móvil , incluyendo el sensor de movimiento :
medios de detección para detectar el movimiento del dispositivo móvil y generar una primera información relativa al movimiento del dispositivo móvil; y
medios de procesamiento del sensor de movimiento , acoplados de manera comunicativa a los medios de detección , para integrar la primera información a una primera velocidad para generar una segunda información indicativa de un resultado de integrar la primera información;
en el que el sensor de movimiento está configurado para proporcionar muestras de la segunda información al procesador del dispositivo móvil , siendo las muestras a una segunda velocidad inferior a la primera velocidad.
PDF original: ES-2664957_T3.pdf
Método y sistema GNC para la determinación del ángulo de giro.
(08/11/2017) Método para determinar el ángulo de giro de un proyectil guiado y sustancialmente o parcialmente estable al giro que comprende un sistema de control, receptor de posicionamiento basado en radio y sensor para medir velocidad angular de giro, en el que se incluyen las siguientes etapas:
(a) actuación de los actuadores del proyectil mediante el sistema de control, incluido en el proyectil , para maniobramiento del proyectil ;
(b) estimación de una primera señal, la fuerza de control del proyectil, basándose en el sistema de control incluido en el proyectil ;
(c) medición de una segunda señal, la velocidad del proyectil con respecto al sistema de…
Procedimiento de restitución de movimientos de la línea de visión de un instrumento óptico.
(01/11/2017) Procedimiento de restitución de movimientos de una línea de visión (V) en balanceo, cabeceo y guiñada de un instrumento de observación en el transcurso de la adquisición de imágenes de una duración de típicamente unos segundos por captura de fotograma, deformando dichos movimientos cada imagen en una gama de frecuencias que pueden ir hasta altas frecuencias de unas centenas de Hercios, según el cual, a partir del instrumento montado sobre un portador que se está desplazando, se forman, durante el tiempo de duración [Ti, Tf] de la captura de fotograma, al menos dos imágenes (14a, 14b) que contienen una misma parte de una escena, estando las capturas de estas dos imágenes desfasadas en el tiempo por un valor conocido T sustancialmente constante, y dichos movimientos de la línea de visión (V) del instrumento se determinan…
Sistema y método para determinar trayectorias en conductos subterráneos.
(04/08/2017). Solicitante/s: TUBECHECK S.L. Inventor/es: NUÑO GARCIA,FERNANDO, ALVAREZ ALVAREZ, JUAN CARLOS, FERNANDEZ VILLLANUEVA,Daniel, RIVERA BLÁZQUEZ,Óscar.
Sistema y método para determinar trayectorias en conductos subterráneos.
El sistema comprende:
- una plataforma móvil prevista para su desplazamiento en un conducto subterráneo para realizar una inspección del mismo;
- un sistema de referencia con uno o más sensores no inerciales para control de la distancia recorrida por la plataforma móvil ;
- un módulo electrónico asociado a dicha plataforma móvil y dotado con sensores inerciales para realizar un mapeado en un tramo del conducto subterráneo con base en unos datos adquiridos que proporcionan unas señales de navegación y a unos patrones temporales de los mismos; y
- unos medios de computación para calcular la trayectoria seguida por la plataforma móvil tomando en consideración los datos adquiridos y los patrones temporales asociados, estando dichos datos adquiridos corregidos frente a posibles derivas mediante una comparación con unos datos obtenidos por el (los) sensor(es) no inerciales.
PDF original: ES-2628950_A2.pdf
PDF original: ES-2628950_R1.pdf
Procedimiento y dispositivo para mejorar la navegación inercial de un artefacto.
(28/06/2017). Solicitante/s: MBDA FRANCE. Inventor/es: LARCHER, ERIC, GUIBOUT,VINCENT, DE ARAUJO,BRUNO.
Procedimiento para mejorar la navegación inercial de un artefacto (M) equipado con una central inercial (IM) de calidad mediocre y disparado desde un portador (L) equipado con una central inercial (IL) de precisión,
procedimiento en el que:
- antes del disparo de dicho artefacto (M) desde el portador (L), las desviaciones medias de los acelerómetros y de los girómetros de la central inercial (IM) de dicho artefacto se determinan con ayuda de la central inercial (IL) de dicho portador (L);
caracterizado por que
- durante la navegación inercial de dicho artefacto (M), después del disparo, las mediciones acelerométricas y girométricas suministradas por dicha central inercial (IM) de dicho artefacto (M) son corregidas por dichas desviaciones medias determinadas antes del disparo.
PDF original: ES-2634873_T3.pdf
DISPOSITIVO DE REGISTRO DE LA POSICIÓN NATURAL DE LA CABEZA DE UN INDIVIDUO MEDIANTE UNIDAD DE MEDICIÓN INERCIAL (IMU) Y MÉTODO ASOCIADO.
(05/06/2017). Solicitante/s: GARCÍA RIELO, José María. Inventor/es: GARCÍA RIELO,José María, ÁLVAREZ SUÁREZ,Beatriz.
Dispositivo para registro de la posición natural de la cabeza (NHP) de un individuo mediante unidad de medición inercial (IMU) y método asociado a dicho dispositivo, que permite establecer una relación entre la posición de la cabeza en las imágenes obtenidas mediante técnicas radiológicas habituales y la NHP para optimizar la planificación y la ejecución de intervenciones. El dispositivo comprende una primer soporte destinado a ser sostenido, por su borde exterior recubierto por un molde entre los maxilares del individuo, sobre el cual se dispone un segundo soporte , que contiene una pluralidad de referencias radiopacas , dimensionado para acoger a una unidad IMU de reducido tamaño. Una unidad de control externa recibe, almacena y procesa las mediciones obtenidas por la IMU del dispositivo.
PDF original: ES-2615167_A1.pdf
PDF original: ES-2615167_B1.pdf
Altímetro basado en sistemas radar, inercial y de presión atmosférica para vehículos aéreos, acrobáticos y no tripulados.
(15/02/2017) Altímetro basado en sistemas radar, inercial y de presión atmosférica para vehículos aéreos, acrobáticos y no tripulados.
El objeto de la invención es la obtención de un sensor capaz de medir la altura con respecto al suelo integrando tecnologías radar, barométrica e inercial.
En dicho dispositivo se genera una emisión de radio que sirve para medir el retardo de la reflexión recibida utilizando procedimientos de procesamiento y filtrado digital.
Simultáneamente, se realizan lecturas de un sensor barométrico e inercial que permiten complementar y corregir errores inherentes a las medidas de la señal de radio.
La invención permite obtener medidas fiables en cualquier actitud de vuelo utilizando procedimientos basados en: i) fusión ponderada de los datos…
Un procedimiento de localización de un robot en un plano de localización.
(30/11/2016) Un procedimiento de localización de un robot en un plano de localización asociado con una referencia bidimensional con dos ejes x e y que comprende las siguientes etapas:
- determinar por odometría una estimación de las coordenadas x1 e y1 del robot en el plano de localización, así como una estimación de su orientación θ1 relativamente a una dirección de referencia;
- determinar una estimación θ2 de la orientación del robot mediante el uso de una brújula virtual que identifica al menos dos pares de puntos de interés, siendo identificados los primeros puntos de cada par en un panorama de referencia y siendo identificado un segundo punto de cada par en un panorama…
Métodos y aparatos para mitigar la interferencia por sobrevuelo en sistema de aterrizaje con instrumentos.
(05/10/2016) Método, que comprende:
realizar una primera medición de una posición de una aeronave relativa a una primera ubicación en base a un sistema de aterrizaje con instrumentos en un instante de medición;
realizar una segunda medición de la posición de la aeronave en base a mediciones inerciales realizadas durante un primer periodo de tiempo que comienza antes de la primera medición en un primer instante anterior y que termina en el instante de medición, estando la segunda medición adicionalmente basada en una medición de la posición de la aeronave en el primer instante anterior en base al sistema de aterrizaje con instrumentos;
realizar un tercera…
Sistema y procedimiento para monitorizar movimientos y vibraciones de estructuras en movimiento.
(13/07/2016) Sistema para monitorizar movimientos de una estructura fija con
- al menos un dispositivo de medición inercial fijado en la estructura para determinar velocidades de rotación y valores de aceleración en un sistema de referencia fijo en tierra,
- una unidad central para determinar un valor de monitorización basándose en las velocidades de rotación y en los valores de aceleración mediante un algoritmo de navegación inercial, y
- una unidad de emisión para emitir el valor de monitorización, estando configurada la unidad central para determinar y/o para corregir un fallo de medición del dispositivo de medición inercial basándose en una condición marco predeterminada por la estructura y para respaldar de esta manera el algoritmo de navegación, y
- estando configurada la unidad central para…
Procedimiento para el apoyo de la navegación inercial de un aparato volador.
(30/03/2016) Procedimiento para el apoyo de la navegación inercial de un aparato volador (FK) con un sistema de navegación inercial (INS) que presenta una unidad de medición de la inercia (IMU) y con una cámara que mira hacia delante para la captación continua de una serie de imágenes de un escenario sobrevolado por el aparato volador (FK), proporcionando la serie de imágenes captadas de forma continua datos para una comparación de los datos, que apoya la navegación inercial, con los datos de referencia archivados en el aparato volador (FK), captando la cámara imágenes desde distintas perspectivas del escenario sobrevolado y caracterizándose la posición y la situación de la cámara respecto a un sistema de coordenadas en el momento de una primera toma en la posición 1 por medio de una matriz de rotación y de un vector de traslación, y caracterizándose…
MÉTODO DE LOCALIZACIÓN EN ESPACIOS INTERIORES BASADO EN DETECCIÓN Y EMPAREJAMIENTO DE PUNTOS DE LUZ.
(30/04/2015). Ver ilustración. Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Inventor/es: JIMENEZ RUIZ,ANTONIO RAMON, SECO GRANJA,Fernando Andrés, ZAMPELLA MÉNDEZ,Francisco.
Método de localización en espacios interiores basado en detección y emparejamiento de puntos de luz que comprende obtener un mapa de puntos de luz de un recinto; detectar el movimiento de un usuario;detectar el paso bajo puntos de luz dispuestos en el recinto, mediante un sensor luminoso provisto en un dispositivo móvil;donde además el método comprende: establecer hipótesis de ubicación inicial del usuario con respecto al mapa de puntos de luz;actualizar las hipótesis de ubicación del usuario según la información relativa al movimiento del usuario y cada vez que se detecta un punto de luz; asignar una probabilidad a las hipótesis de ubicación, y; determinar la ubicación concreta del usuario como aquella designada por la hipótesis de ubicación que tenga asignada la mayor probabilidad.
Procedimiento para la determinación automática de al menos un parámetro objetivo que describe el cambio de posición de un vehículo motorizado.
(18/03/2015) Procedimiento para la determinación automática de al menos un parámetro objetivo que describe el cambio de posición de un vehículo motorizado, en particular el cambio del ángulo de cabeceo y/o ángulo de balanceo y/o ángulo de guiñada,
en el cual el parámetro objetivo es determinado a partir del desplazamiento de perspectiva de puntos de orientación notables de al menos dos imágenes cronológicamente consecutivas tomadas por un dispositivo de toma de imágenes, en particular una monocámara, colocada en una relación posicional fija con el vehículo motorizado y en el cual del desplazamiento en perspectiva se determinan una matriz de rotación que describe la rotación del dispositivo de toma de imágenes entre la toma de ambas imágenes y de allí la dimensión del objeto prefijado, caracterizado por que
para la determinación de la matriz de rotación
- se determina…
Procedimiento de estimación de desfases de imágenes de línea obtenidos por un sensor de imagen de barrido espacial o aerotransportado.
(02/07/2014) Procedimiento de estimación de desplazamientos de imágenes de líneas de una imagen, dicha "imagen compuesta", está constituida por la yuxtaposición de J imágenes de líneas, en el que:
- las imágenes de líneas representan una escena en la superficie (S) de un cuerpo celeste, adquirida sucesivamente mediante una línea de células sensibles de un sensor situado en un vehículo que sobrevuelan dicho cuerpo celeste, estando constituida cada imagen de línea por una pluralidad de píxeles,
- una imagen de línea Lj,1≤ j ≤ J, presenta un desplazamiento lateral y/o longitudinal entre la posición que la imagen de línea Lj está destinada a ocupar en la imagen compuesta y la posición que debería ocupar por el hecho de un error de visión del sensor en el transcurso de la adquisición…
{kind=link}
{kind=link}