Aparato de control para vehículo utilitario de navegación autónoma.
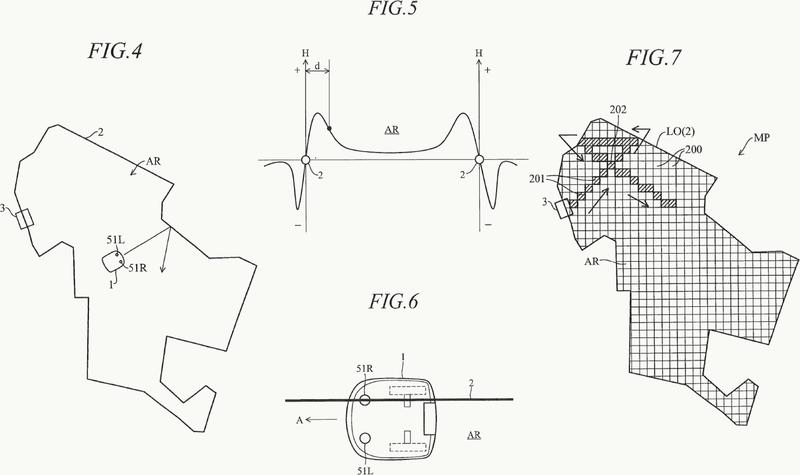
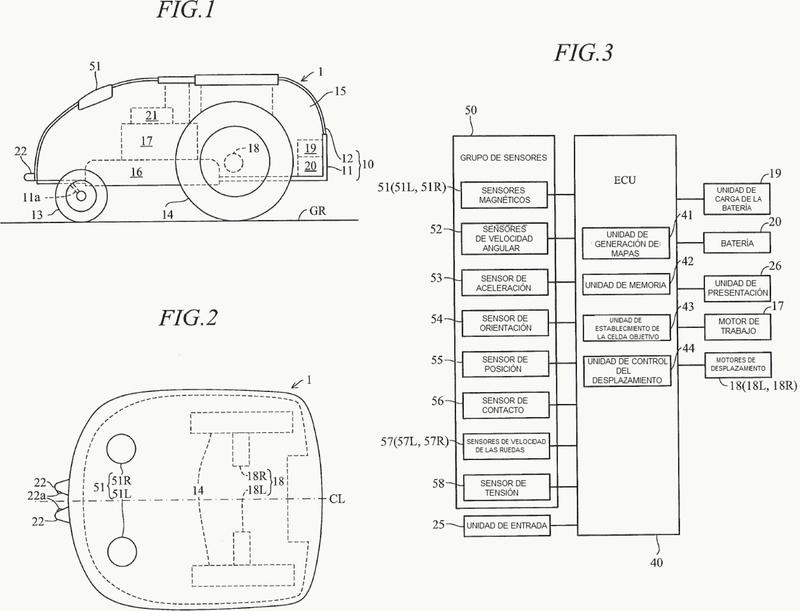
Un aparato para controlar el funcionamiento de un vehículo (1) utilitario de navegación autónoma equipado con un impulsor (18) principal para desplazarse sobre un área (AR) de trabajo delineada mediante una línea (L0) delimitadora para realizar un trabajo de manera autónoma,
que comprende:
una unidad (41) de generación de mapas que genera un mapa (MP) de un área (AR) de trabajo comprendido de un conjunto de una pluralidad de celdas (200);
un detector (55, 51) de posición que detecta una primera posición del vehículo (1) en el mapa (MP) del área de trabajo y una segunda posición del vehículo (1) con respecto a la línea (L0) delimitadora del área (AR) de trabajo;
una unidad de memoria (42) que cuenta y guarda en memoria el número de veces n que un vehículo (1) pasa sobre cada una de las celdas (200) en base a la primera posición del vehículo (1) detectada por el detector (55, 51) de la posición;
una unidad (43) de establecimiento de la celda objetivo que selecciona una de las celdas (200) en base al número n contado guardado en memoria en la unidad (42) de memoria y establece le seleccionada como la celda (210) objetivo; y
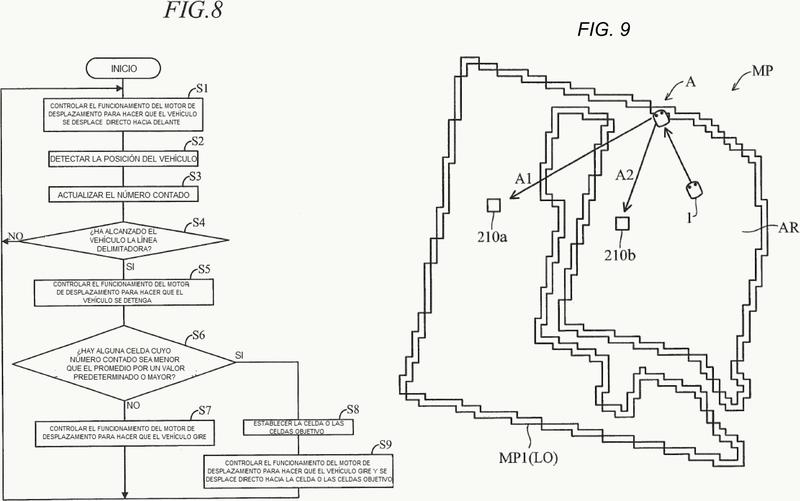
una unidad (44) controladora del desplazamiento que detecta si el vehículo (1) ha alcanzado la línea (L0) delimitadora en base a la segunda posición del vehículo (1) detectada por el detector (55, 51) de posición, y controla el funcionamiento del impulsor (18) principal para hacer que el vehículo (1) se desplace sobre el área (AR) de trabajo hasta que se detecta que el vehículo (1) ha alcanzado la línea (L0) delimitadora; y para hacer que el vehículo (1) gire hacia la celda (210) objetivo establecida mediante la unidad (43) de establecimiento de la celda objetivo y después se desplace directo hacia delante cuando se detecte que el vehículo (1) haya alcanzado la línea (L0) delimitadora,
caracterizado por que la unidad (43) de establecimiento de la celda objetivo calcula un valor promedio del número n contado dividiendo la suma de los números n contados de las celdas (200) por el número total de celdas (200); y establece una de las celdas (200) como la celda (210) objetivo cuyo número n contado guardado en memoria en la unidad (42) de memoria es menor que el valor promedio por un valor predeterminado.
en donde, si dos, la primera y la segunda, celdas (210a y 210b) ambas satisfacen la condición de tener el número n contado menor que el valor promedio por un valor predeterminado y el número n contado de la primera celda (210a) es menor que el número n contado de la segunda celda (210b), y el vehículo (1) no puede desplazarse en la dirección de la primera celda (210a) ya que la línea (L0) delimitadora está presente entre el vehículo (1) y la primera celda (210a), la unidad (43) de establecimiento de la celda objetivo excluye la primera celda (210a) como la celda (210) objetivo candidata y establece la segunda celda (210b) como la celda objetivo (210).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E16161626.
Solicitante: HONDA MOTOR CO., LTD..
Nacionalidad solicitante: Japón.
Dirección: 1-1, Minami-Aoyama 2-chome, Minato-ku Tokyo, 107-8556 JAPON.
Inventor/es: YAMAMURA,MAKOTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A01D34/00 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01D RECOLECCION; SIEGA. › Segadoras (combinadas con aparatos que realizan otra operación durante la siega A01D 37/00 - A01D 41/00, A01D 43/00; convertibles en aparatos para otro uso distinto a la siega o capaces de realizar otras operaciones además de la siega A01D 42/00 ); Aparatos de corte de las cosechadoras.
- G05D1/02 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
PDF original: ES-2685003_T3.pdf
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
Un aparato, método y programa informático para habilitar la carga de un vehículo, del 15 de Julio de 2020, de Nokia Technologies OY: Un método que comprende: obtener información de un vehículo alimentado por energía solar, en el que la información comprende al […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
Robot móvil autónomo para ejecutar asignaciones de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, del 1 de Julio de 2020, de OMRON CORPORATION: Un robot móvil para ejecutar una asignación de trabajo en un entorno físico en el que hay obstáculos estacionarios y no estacionarios, comprendiendo […]
Procedimiento de limpieza temporizada, dispositivo y medio de almacenamiento, del 17 de Junio de 2020, de Beijing Xiaomi Mobile Software Co., Ltd: Un procedimiento de limpieza temporizada que comprende: obtener un mapa topográfico de una región de limpieza, en el que el mapa […]
Conjunto compuesto por un sistema de alimentación en tierra y un vehículo eléctrico, del 17 de Junio de 2020, de ALSTOM Transport Technologies: Conjunto formado por un sistema de alimentación en tierra y un vehículo eléctrico , el sistema de alimentación en tierra es del […]
Procedimiento para el control de una unidad de luz de una iluminación exterior de automóvil, automóvil, dispositivo externo al vehículo y sistema, del 17 de Junio de 2020, de AUDI AG: Procedimiento para el control de al menos una unidad de luz de una iluminación exterior de automóvil de un primer automóvil (10a, 10b, 10c) en una columna de vehículos […]
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]