Sistema de asistencia a la conducción de aparcamiento y procedimiento de funcionamiento de un sistema de asistencia a la conducción de aparcamiento.
Sistema semiautomático (30) de asistencia a la conducción de aparcamiento de un vehículo automóvil (1) para ayudar a orientar el vehículo automóvil (1) en un hueco de aparcamiento (2),
que comprende
a. unos medios (46) para captar una señal de activación;
b. unos medios (47) para adquirir una dirección de variación en la que debe modificarse una orientación del vehículo automóvil (1);
c. una unidad de control (40) que, en un estado activo del sistema (30) de asistencia a la conducción de aparcamiento, controla al menos un actor (38) de modo que las ruedas dirigibles (15) del vehículo automóvil (1) sean desviadas en la dirección de variación cuando la dirección de accionamiento ajustada es hacia delante, y las ruedas dirigibles (15) sean desviadas en sentido contrario a la dirección de variación cuando la dirección de accionamiento ajustada es hacia atrás.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/011345.
Solicitante: VOLKSWAGEN AKTIENGESELLSCHAFT.
Nacionalidad solicitante: Alemania.
Dirección: Berliner Ring 2 38440 Wolfsburg ALEMANIA.
Inventor/es: ROHLFS,MICHAEL, SCHÖNING,VOLKMAR, SCHWITTERS,FRANK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B62D15/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 15/00 Direcciones no previstas en otro lugar. › Indicadores de dirección.
PDF original: ES-2542076_T3.pdf
Fragmento de la descripción:
Sistema de asistencia a la conducción de aparcamiento y procedimiento de funcionamiento de un sistema de asistencia a la conducción de aparcamiento.
La invención concierne a un sistema de asistencia a la conducción de aparcamiento y a un procedimiento de funcionamiento de un sistema de asistencia a la conducción de aparcamiento, con los cuales se puede ayudar a orientar un vehículo automóvil en un hueco de aparcamiento.
Los modernos vehículos automóviles disponen frecuentemente de sistemas de asistencia al aparcamiento. Los sistemas de asistencia al aparcamiento pueden incluir diferentes funciones de asistencia. Éstas comprenden, por ejemplo, a) un aviso de distancia (control de distancia de aparcamiento - PDC) ;
b) una indicación de informaciones sobre la idoneidad de un hueco de aparcamiento, por ejemplo sus dimensiones;
c) una asistencia del conductor al aparcar, lo que puede comprender una consigna de ángulo de conducción o incluso una intervención de conducción automática; o d) un aparcamiento completamente automatizado.
En las funciones de asistencia c) y d) es generalmente necesaria una intervención de conducción. Esto significa que se tiene que variar activamente la conducción del vehículo automóvil durante el proceso de aparcamiento. Esta intervención de conducción puede ser realizada bajo control automático por el propio vehículo automóvil. En las funciones de asistencia c) y d) el vehículo automóvil calcula una trayectoria nominal a lo largo de la cual se aparca o debe aparcarse el vehículo automóvil en el hueco de aparcamiento.
Se conoce por el documento DE 38 27 729 A1 un dispositivo de aviso de colisión para vehículos automóviles que ofrece una funcionalidad según a) . Con ayuda del dispositivo allí descrito se determina si existe un riesgo de colisión con un obstáculo en un curso seguido por el vehículo automóvil.
Se conocen por los documentos DE 102 20 426 A1 y DE 102 20 427 A1 unos sistemas de asistencia al aparcamiento que determinan un tamaño de un hueco de aparcamiento, calculan a partir de éste un posible desarrollo de aparcamiento para el vehículo automóvil y dan instrucciones a un conductor relativas a la dirección en la que ha de girar un volante y al modo en el que tiene que acelerar o frenar el vehículo automóvil. En ambos documentos se menciona también una forma de realización en la que el conductor maniobra la dirección y el vehículo automóvil se acelera y se frena de manera autónoma. Asimismo, se describe una respectiva forma de realización en la que el vehículo automóvil es aparcado o desaparcado de forma completamente automática sin una intervención de conducción y sin una intervención de aceleración y/o de frenado. En el documento DE 102 20 427 A1 está previsto también que el desarrollo ventajoso de aparcamiento y desaparcamiento le sea presentado visualmente al conductor en un aparato indicador.
Se conoce también por el documento DE 103 54 661 A1 un sistema de asistencia al aparcamiento que puede adquirir un tamaño de hueco de aparcamiento, calcular una trayectoria nominal y comunicar a un conductor informaciones e instrucciones sobre el proceso de aparcamiento, de modo que éste pueda aparcar el vehículo automóvil en el hueco de aparcamiento a lo largo de la trayectoria nominal prefijada. Durante un primer proceso de aparcamiento de una vez se puede realizar automáticamente la conducción. En otra forma de realización está previsto que puedan emitirse advertencias referentes a una dirección de conducción y una dirección de marcha para un proceso de maniobra.
Se conoce por el documento WO 2004/059408 A1 un sistema de asistencia al aparcamiento en el que se le presentan al conductor el hueco de aparcamiento y el vehículo automóvil junto con una trayectoria nominal en una vista en planta de la situación de aparcamiento. Mediante una representación en perspectiva del vehículo automóvil respecto del hueco de aparcamiento se indica que el vehículo automóvil puede ser orientado todavía por el conductor en el hueco de aparcamiento al final del proceso de aparcamiento para obtener una posición de aparcamiento óptima para el vehículo automóvil.
Los sistemas de asistencia al aparcamiento que aparcan un vehículo automóvil de manera completamente automática están ligados a algunos problemas. En los procesos completamente automatizados las personas tienden a no seguir sus deberes de control tan estrictamente como esto es ofrecido. Así, existe el riesgo de que el conductor de un vehículo automóvil que dispone de un sistema de asistencia al aparcamiento para realizar un aparcamiento completamente automatizado descuide sus obligaciones de vigilar el espacio de aparcamiento, especialmente en lo que respecta a personas que se muevan en sí dentro de la zona del hueco de aparcamiento. Asimismo, al menos para un conductor poco experimentado no es sencillo predecir qué movimientos de marcha realizará el vehículo automóvil durante el aparcamiento. Se dificulta con ello aún más la observancia de los deberes de control. Para hacer que se observen completamente los deberes de control por parte del vehículo automóvil son necesarios
sistemas sensores muy complejos con redundancia y diversidad, ya que especialmente los objetos móviles solamente son reconocidos con dificultad como tales por un vehículo automóvil. Si un objeto móvil, por ejemplo otro vehículo automóvil que se esté moviendo, no es reconocido como un objeto movido, existe entonces un riesgo incrementado de colisión. Por tanto, se prefieren hoy en día los sistemas de asistencia al aparcamiento en los que el conductor participa activamente en el proceso de aparcamiento para cumplir con los deberes de control y, no obstante, aliviarse de una parte de las tareas de aparcamiento.
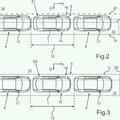
Es común a los sistemas de asistencia al aparcamiento semiautomáticos conocidos el que puedan ayudar a un proceso de aparcamiento de una vez que conduzca a un vehículo automóvil aparcado óptimamente orientado solamente cuando el hueco de aparcamiento presente un tamaño suficiente, especialmente una longitud suficiente. Sin embargo, particularmente en ciudades en la que los vehículos se aparcan frecuentemente junto al borde de la calzada en dirección paralela al trazado de la calle, es frecuente que no haya huecos de aparcamiento marcados. Por tanto, varían fuertemente los tamaños de los huecos de aparcamiento. Sin embargo, no es frecuente que un conductor encuentre huecos de aparcamiento suficientemente grandes en los que se pueda aparcar el vehículo automóvil de una vez por medio de un sistema de asistencia al aparcamiento según el estado de la técnica. Por tanto, el vehículo automóvil está aparcado ciertamente en el hueco de aparcamiento al final de un primer paso de aparcamiento de una vez, pero la orientación del vehículo automóvil se desvía de una orientación nominal que en general está orientada paralelamente a un borde longitudinal del hueco de aparcamiento. Como realizado de una vez se considera un paso de aparcamiento en el que el vehículo se mueve continuamente y no se varía una dirección de giro de las ruedas del vehículo automóvil.
Se conoce ciertamente por el documento WO 2004/059408 un sistema de asistencia al aparcamiento en el que se le indica al conductor mediante una flecha una dirección de maniobra subsiguiente. Sin embargo, no se resuelve óptimamente en su totalidad el problema de variar la orientación de un vehículo automóvil respecto de su orientación en un hueco de aparcamiento por medio de un sistema de asistencia al aparcamiento semiautomático. El mismo problema de variar la orientación del vehículo automóvil se presenta también cuando el vehículo automóvil debe ser desaparcado del hueco de aparcamiento. El objetivo de un proceso de desaparcamiento es variar la orientación del vehículo automóvil de modo que este vehículo automóvil pueda ser movido seguidamente de una vez hacia fuera del hueco de aparcamiento.
En el documento DE 102 50 021 A1 se describe un procedimiento de funcionamiento de un sistema de representación en un vehículo para localizar un hueco de aparcamiento. El sistema de representación comprende al menos una cámara con la que puede registrarse una zona de observación en el entorno del vehículo, una unidad de procesamiento de imagen en la que pueden procesarse los datos de imagen que vienen de la cámara, y una pantalla en el habitáculo del vehículo, en la cual pueden indicarse como imagen los datos de imagen que vienen del dispositivo de procesamiento de imagen. En este caso, en la imagen actual de la pantalla se integra por la unidad de procesamiento de imagen un símbolo de espacio de aparcamiento que simboliza a escala en la imagen actual una zona que puede... [Seguir leyendo]
Reivindicaciones:
1. Sistema semiautomático (30) de asistencia a la conducción de aparcamiento de un vehículo automóvil (1) para ayudar a orientar el vehículo automóvil (1) en un hueco de aparcamiento (2) , que comprende
a. unos medios (46) para captar una señal de activación;
b. unos medios (47) para adquirir una dirección de variación en la que debe modificarse una orientación del vehículo automóvil (1) ;
c. una unidad de control (40) que, en un estado activo del sistema (30) de asistencia a la conducción de aparcamiento, controla al menos un actor (38) de modo que las ruedas dirigibles (15) del vehículo automóvil (1) sean desviadas en la dirección de variación cuando la dirección de accionamiento ajustada es hacia delante, y las ruedas dirigibles (15) sean desviadas en sentido contrario a la dirección de variación cuando la dirección de accionamiento ajustada es hacia atrás.
2. Sistema (30) de asistencia a la conducción de aparcamiento según la reivindicación 1, caracterizado por que la unidad de control (40) controla el al menos un actor (38) de modo que las ruedas dirigibles (15) del vehículo automóvil (1) sean desviadas sustancialmente al máximo en la dirección de variación cuando la dirección de accionamiento ajustada sea hacia delante, y las ruedas dirigibles (15) sean desviadas sustancialmente al máximo en sentido contrario a la dirección de variación cuando la dirección de accionamiento ajustada sea hacia atrás.
3. Sistema (30) de asistencia a la conducción de aparcamiento según la reivindicación 1 o 2, caracterizado por que la unidad de control (40) está configurada para captar y evaluar informaciones de distancia de una unidad de adquisición de distancia (56) que comprenden informaciones sobre una o varias distancias del vehículo automóvil (1) a objetos que limitan el hueco de aparcamiento (2) , a fin de averiguar y emitir una recomendación de dirección de accionamiento en base a las informaciones de distancia captadas.
4. Sistema (30) de asistencia a la conducción de aparcamiento según la reivindicación 3, caracterizado por que la unidad de adquisición de distancia (56) comprende sensores de medida de distancia en un extremo delantero (25) y en un extremo trasero (26) del vehículo automóvil (1) y las informaciones de distancia comprenden informaciones sobre al menos una distancia del vehículo automóvil (1) a una limitación delantera y al menos una distancia a una limitación trasera del hueco de aparcamiento (2) .
5. Sistema (30) de asistencia a la conducción de aparcamiento según cualquiera de las reivindicaciones 3 o 4, caracterizado por que la unidad de control (40) comprende un comparador (66) para comparar la distancia única o las varias distancias con al menos un valor umbral de distancia y por que se emite al menos una señal de aviso cuando la distancia única o una de las varias distancias cae por debajo del valor umbral de distancia.
6. Sistema (30) de asistencia a la conducción de aparcamiento según la reivindicación 5, caracterizado por que la unidad de control (40) está acoplada con una instalación de freno del vehículo automóvil (1) y por que, al caer por debajo del valor umbral de distancia, se frena y/o suprime activamente por medio de la unidad de control (40) un movimiento del vehículo automóvil (1) que conduce a una reducción adicional de la distancia única o de la una de las varias distancias.
7. Sistema (30) de asistencia a la conducción de aparcamiento según cualquiera de las reivindicaciones anteriores, caracterizado por que la unidad de control (40) puede recibir señales de uno o varios sensores (68, 70) que captan estados del vehículo automóvil y/o eventos, estando diseñada la unidad de control (40) para evaluar las señales y, en función de la evaluación, influir sobre las funciones del sistema (30) de asistencia a la conducción de aparcamiento.
8. Sistema (30) de asistencia a la conducción de aparcamiento según la reivindicación 7, caracterizado por que las señales comprenden una información sobre una intervención de conducción de un conductor del vehículo automóvil
(1) y la influenciación de las funciones del sistema (30) de asistencia a la conducción de aparcamiento comprende una desactivación del sistema (30) de asistencia a la conducción de aparcamiento al detectarse la intervención de conducción.
9. Sistema (30) de asistencia a la conducción de aparcamiento según la reivindicación 7 u 8, caracterizado por que las señales comprenden una información sobre una velocidad del vehículo automóvil (1) y la influenciación de las funciones del sistema (30) de asistencia a la conducción de aparcamiento comprende una desactivación del sistema (30) de asistencia a la conducción de aparcamiento al rebasarse un valor de velocidad previamente definido.
10. Sistema (30) de asistencia a la conducción de aparcamiento según cualquiera de las reivindicaciones anteriores, caracterizado por que la unidad de control (40) comprende una unidad de determinación de orientación (72) que compara una orientación actual del vehículo automóvil (1) con una orientación nominal y que, en caso de coincidencia de la orientación actual con la orientación nominal, controla el al menos un actor (38) de modo que las 11 5
ruedas dirigibles (15) sean movidas hacia una posición central sustancialmente no desviada.
11. Sistema (30) de asistencia a la conducción de aparcamiento según cualquiera de las reivindicaciones 7 a 10, caracterizado por que las señales comprenden una información sobre un estado de movimiento y/o un estado de frenado del vehículo automóvil (1) y la influenciación de las funciones del sistema (30) de asistencia a la conducción de aparcamiento comprende una supresión del control del al menos un actor (38) para provocar una desviación de las ruedas dirigibles (15) cuando el vehículo automóvil (1) está en movimiento y/o no se encuentra frenado.
12. Procedimiento de funcionamiento de un sistema semiautomático (30) de asistencia a la conducción de aparcamiento de un vehículo automóvil (1) para ayudar a orientar el vehículo automóvil (1) en un hueco de aparcamiento (2) , que comprende
a. captar una señal de activación;
b. adquirir una dirección de variación en la que debe modificarse una orientación del vehículo automóvil (1) ; y
c. controlar al menos un actor (38) por medio de una unidad de control (40) en un estado activo del sistema (30) de asistencia a la conducción de aparcamiento, de modo que las ruedas dirigibles (15) del vehículo automóvil (1) sean desviadas en la dirección de variación cuando la dirección de accionamiento ajustada es hacia adelante, y las ruedas dirigibles (15) sean desviadas en sentido contrario a la dirección de variación cuando la dirección de accionamiento ajustada es hacia atrás.
13. Procedimiento según la reivindicación 12, caracterizado por que el control de al menos un actor (38) por medio de una unidad de control (40) en un estado activo del sistema (30) de asistencia a la conducción de aparcamiento se realiza de tal manera que las ruedas dirigibles (15) del vehículo automóvil (1) sean desviadas sustancialmente al máximo en la dirección de variación cuando la dirección de accionamiento ajustada es hacia adelante, y las ruedas dirigibles (15) sean desviadas sustancialmente al máximo en sentido contrario a la dirección de variación cuando la dirección de accionamiento ajustada es hacia atrás.
14. Procedimiento según la reivindicación 12 ó 13, caracterizado por que se adquieren por medio de una unidad de adquisición de distancia (56) unas informaciones de distancia que comprenden informaciones sobre una o varias distancias del vehículo automóvil (1) a objetos que limitan el hueco de aparcamiento (2) , y, basándose en las informaciones de distancia, se determina y emite una recomendación de dirección de accionamiento por medio de la unidad de control (40) .
15. Procedimiento según la reivindicación 14, caracterizado por que se comparan la distancia única o las varias distancias con un valor umbral de distancia por medio de un comparador (66) de la unidad de control (40) y se emite una señal de aviso cuando la distancia única o una de las varias distancias cae por debajo del valor umbral de distancia.
16. Procedimiento según cualquiera de las reivindicaciones 14 ó 15, caracterizado por que la unidad de control (40) está acoplada con una instalación de freno del vehículo automóvil (1) y la unidad de control (40) , al caer por debajo del valor umbral de distancia, frena y/o suprime activamente un movimiento del vehículo automóvil (1) que conduce a una reducción adicional de la distancia única o de la una de las varias distancias.
17. Procedimiento según cualquiera de las reivindicaciones 12 a 16, caracterizado por que la unidad de control (40) recibe señales de uno o varios sensores que captan estados del vehículo automóvil y/o eventos, y la unidad de control (40) evalúa las señales y, en función de la evaluación, influye sobre las funciones del sistema (30) de asistencia a la conducción de aparcamiento.
18. Procedimiento según la reivindicación 17, caracterizado por que las señales comprenden una información sobre una velocidad del vehículo automóvil (1) y la unidad de control (40) influye sobre las funciones del sistema (30) de asistencia a la conducción de aparcamiento desactivando para ello el sistema (30) de asistencia a la conducción de aparcamiento cuando se rebasa un valor de velocidad previamente definido.
19. Procedimiento según la reivindicación 17 o 18, caracterizado por que las señales comprenden una información sobre una intervención de conducción de un conductor del vehículo automóvil (1) y la unidad de control (40) influye sobre las funciones del sistema (30) de asistencia a la conducción de aparcamiento desactivando para ello el sistema (30) de asistencia a la conducción de aparcamiento cuando se detecta la intervención de conducción.
20. Procedimiento según cualquiera de las reivindicaciones 17 a 19, caracterizado por que las señales comprenden una información sobre un estado de movimiento y/o un estado de frenado del vehículo automóvil (1) y el aparato de control influye sobre las funciones del sistema (30) de asistencia a la conducción de aparcamiento suprimiendo para ello el control del al menos un actor (38) para provocar una desviación de las ruedas dirigibles (15) cuando el vehículo automóvil (1) está en movimiento y/o no se encuentra frenado.
21. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que la unidad de
adquisición de distancia (56) comprende sensores de medida de distancia en un extremo delantero (25) y en un extremo trasero (26) del vehículo automóvil (1) y las informaciones de distancia comprenden una distancia mínima del vehículo automóvil (1) a una limitación delantera y una distancia mínima a una limitación trasera del hueco de aparcamiento (2) .
22. Procedimiento según cualquiera de las reivindicaciones anteriores, caracterizado por que la unidad de control (40) comprende una unidad de determinación de orientación (72) que compara una orientación actual del vehículo automóvil (1) con una orientación nominal y que, en caso de coincidencia de la orientación actual con la orientación nominal, controla el al menos un actor (38) de modo que las ruedas dirigibles (15) sean movidas hacia una posición central no desviada.
Patentes similares o relacionadas:
Método, sistema y dispositivo de control de emergencia para gestión de tráfico de vehículos autónomos en situaciones de emergencia, del 17 de Junio de 2020, de THE BOEING COMPANY: Método para gestión de tráfico de vehículos autónomos en situaciones de emergencia, que comprende: tras la recepción , por un vehículo […]
Dirección asistida electromecánica, procedimiento para la determinación de un ángulo de giro absoluto y procedimiento para la calibración de un dispositivo de medición para la medición de un ángulo de giro absoluto, del 15 de Abril de 2020, de THYSSENKRUPP PRESTA AG: Dirección asistida electromecánica para un automóvil, que comprende • un árbol de dirección que está soportado de forma giratoria alrededor de un eje de giro […]
Sistemas y método de ayuda a la conducción de vehículos, del 19 de Febrero de 2020, de Siemens Mobility S.A.S: Sistema de ayuda a la conduccion de un vehiculo , dicho sistema comprende: un dispositivo de determinacion de trayectoria capaz de determinar una trayectoria para […]
 Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Sistema de visión para un vehículo, en particular para un vehículo comercial, del 29 de Enero de 2020, de MEKRA LANG GMBH & CO. KG: Sistema de visión para un vehículo , con
una unidad de captación para la captación de una zona de visión ;
una unidad de cálculo , que […]
Dispositivo de asistencia para maniobras de atraque en una dársena, del 16 de Octubre de 2019, de NEWTL (Société par Actions Simplifiée): Vehículo de carretera que incluye ruedas delanteras montadas en un eje de dirección delantero y ruedas traseras montadas en un eje trasero […]
Procedimiento y dispositivo para adaptar un ángulo de volante de un volante y un ángulo de dirección de ruedas de una dirección de ruedas en un vehículo tras una maniobra de conducción automatizada efectuada, del 12 de Junio de 2019, de VOLKSWAGEN AKTIENGESELLSCHAFT: Procedimiento para adaptar un ángulo de volante real de un volante y un ángulo de dirección de ruedas real de una dirección de ruedas […]
Sistema de asistencia al conductor, del 11 de Junio de 2019, de ROBERT BOSCH GMBH: Sistema de asistencia al conductor para vehículos a motor, que comprende: - un regulador de guiado longitudinal , el cual está configurado […]
 Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]
Procedimiento para aparcar de manera, al menos parcialmente, autónoma un vehículo motorizado en un hueco de aparcamiento con un escalón, sistema de asistencia al conductor y vehículo motorizado, del 29 de Mayo de 2019, de VALEO SCHALTER UND SENSOREN GMBH: Un procedimiento para aparcar un vehículo motorizado de manera, al menos parcialmente, autónoma en hueco de aparcamiento con un escalón detectado […]