Sistema de control de embarcación marina, sistema de propulsión de embarcación marina y embarcación marina.
Sistema de control de embarcación marina para una embarcación (1,
101) marina que incluye al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina, estando el sistema de control de embarcación marina caracterizado porque comprende:
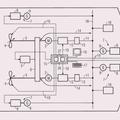
una unidad (60, 60M, 60S) de control que incluye una sección (P1) de salida principal dispuesta para emitir información de control de maniobra de embarcación marina que incluye información de inicio del al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina, y una subsección (P2) de salida dispuesta para emitir información de copia de seguridad que incluye la información de inicio del al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina;
un primer bus (71) de comunicación conectado al al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina y la unidad (60, 60M, 60S) de control, y dispuesto para transmitir la información de control de maniobra de embarcación marina, emitida desde la sección (P1) de salida principal, al al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina;
un segundo bus (72) de comunicación conectado al al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina y la unidad (60, 60M, 60S) de control, y dispuesto para transmitir la información de copia de seguridad, emitida desde la subsección (P2) de salida, al al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina; y
una sección (72a) de conexión de dispositivo auxiliar prevista en el segundo bus (72) de comunicación, y dispuesta para permitir la conexión de un dispositivo (80, 90) auxiliar que ejecuta la comunicación, en relación con información auxiliar distinta de la información de control de maniobra de embarcación marina, con al menos uno del dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina y la unidad (60, 60M, 60S) de control a través del segundo bus (72) de comunicación.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09179694.
Solicitante: YAMAHA HATSUDOKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 2500, Shingai, Iwata-shi Shizuoka-ken 438-8501 JAPON.
Inventor/es: ITO, MAKOTO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B63H21/21 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63H PROPULSION O GOBIERNO MARINO (propulsión de vehículos de colchón de aire B60V 1/14; especialmente adaptados para submarinos que no sean de propulsión nuclear, B63G; especialmente adaptados para torpedos F42B 19/00). › B63H 21/00 Utilización de plantas o grupos motrices de propulsión a bordo de embarcaciones. › Medios de control del motor o de la transmisión especialmente adaptados a su utilización a bordo de buques.
PDF original: ES-2525462_T3.pdf
Fragmento de la descripción:
Sistema de control de embarcación marina, sistema de propulsión de embarcación marina y embarcación marina. ANTECEDENTES DE LA INVENCIÓN
1. Campo de la invención
La presente invención se refiere a un sistema de control de embarcación marina para una embarcación marina que incluye un dispositivo de propulsión de embarcación marina, y a un sistema de propulsión de embarcación marina y a una embarcación marina que incluye un sistema de control de embarcación marina de este tipo.
2. Descripción de la técnica relacionada
Un dispositivo de propulsión de embarcación marina a modo de ejemplo es un motor fueraborda que está unido a la popa de una embarcación marina. El motor fueraborda incluye un motor, una hélice y un mecanismo de cambio. El mecanismo de cambio está previsto en un trayecto de transmisión de potencia entre el motor y la hélice. El mecanismo de cambio tiene una pluralidad de posiciones de cambio. La pluralidad de posiciones de cambio son una posición de conducción hacia delante, una posición neutra y una posición de conducción marcha atrás. La posición de conducción hacia delante es una posición de cambio en la que se transmite la rotación de un árbol de transmisión que se activa por el motor al árbol de hélice para hacer rotar el árbol de hélice en el sentido de conducción hacia delante. La posición de conducción marcha atrás es una posición de cambio en la que la rotación del árbol de transmisión se transmite al árbol de hélice para hacer rotar el árbol de hélice en el sentido de conducción marcha atrás. La posición neutra es una posición de cambio en la que la rotación del árbol de transmisión no se transmite al árbol de hélice, es decir, se interrumpe el trayecto de transmisión de potencia.
El motor fueraborda está dotado de un mecanismo de gobierno para cambiar la dirección (ángulo de gobierno) del motor fueraborda con respecto al casco. Puede ajustarse la dirección de rumbo de la embarcación marina ajustando el ángulo de gobierno. En algunos casos, el mecanismo de gobierno está constituido por un aparato de gobierno por potencia que incluye un accionadorde gobierno, tal como un accionador electromotriz, un accionador hidráulico, etc.
El gobierno de la embarcación marina que tiene el motor fueraborda incluye el ajuste de una salida de motor, la selección de la posición de cambio y el ajuste del ángulo de gobierno. El ajuste de la salida de motor y la selección de la posición de cambio se realizan mediante la operación de una palanca de control remoto incluida en un compartimento de maniobra de embarcación marina. El ajuste del ángulo de gobierno se realiza mediante la operación de una empuñadura de gobierno incluida en el compartimento de maniobra de embarcación marina.
En algunos casos, se adopta un sistema de acelerador electrónico (DBW, dríve-by-wire), que transmite eléctricamente la operación de la palanca de control remoto al motor fueraborda. En este caso, una unidad de control remoto incluye un sensor de posición, que detecta la operación de la palanca de control remoto, y una unidad de control electrónica (a continuación en el presente documento denominada "ECU de controlador remoto") que procesa una señal de salida del sensor de posición. La ECU de controlador remoto emite una orden de grado de apertura del acelerador (orden de velocidad rotacional de motor) y una orden de posición de cambio. El motor fueraborda incluye una unidad de control electrónica (a continuación en el presente documento denominada "ECU de motor fueraborda") que procesa las órdenes desde la ECU de controlador remoto. La ECU de motor fueraborda controla un grado de apertura del acelerador del motor según la orden de grado de apertura del acelerador y controla la posición de cambio del mecanismo de cambio según la orden de posición de cambio.
De la misma manera en algunos casos, se adopta un sistema de gobierno electrónico (SBW, steer-by-wire), que transmite eléctricamente la operación de la empuñadura de gobierno al mecanismo de gobierno. En este caso, están incluidos un sensor de ángulo de operación, que detecta una posición de rotación de la empuñadura de gobierno, y una unidad de control electrónica (a continuación en el presente documento denominada "ECU de gobierno") que procesa una señal de salida del sensor de ángulo de operación. Además, un accionador de gobierno está incluido como fuente de alimentación en el mecanismo de gobierno. La ECU de gobierno emite una orden de ángulo de gobierno. La orden de ángulo de gobierno se envía a la ECU de motor fueraborda. La ECU de motor fueraborda controla el accionador de gobierno basándose en la orden de ángulo de gobierno.
La conexión entre la ECU de controlador remoto y la ECU de motor fueraborda se realiza mediante un bus de comunicación. En el caso en el que la ECU de gobierno esté incluida, la ECU de gobierno también se conecta al bus de comunicación. La comunicación entre la ECU de controlador remoto y la ECU de motor fueraborda y la comunicación entre la ECU de gobierno y la ECU de motor fueraborda se realizan a través del bus de comunicación.
En algunos casos, una embarcación marina está dotada de una pluralidad de compartimentos de maniobra de embarcación marina. Por ejemplo, en algunos casos, una estructura de embarcación marina incluye un compartimento de maniobra de embarcación marina principal dispuesto en un primer piso y un subcompartimento de maniobra de embarcación marina dispuesto en un segundo piso. También hay casos en los que una estructura de embarcación marina incluye un compartimento de maniobra de embarcación marina principal dispuesto en el centro de un casco, un primer subcompartimento de maniobra de embarcación marina dispuesto cerca de la roda, y un
segundo subcompartimento de maniobra de embarcación marina dispuesto cerca de la popa. En casos en los que están previstos una pluralidad de compartimentos de maniobra de embarcación marina, cada compartimento de maniobra de embarcación marina incluye una ECU de controlador remoto y una ECU de gobierno, y todas ellas están conectadas al bus de comunicación.
Mientras tanto, el número de motores fueraborda tampoco se limita a uno. Por ejemplo, en algunos casos se adopta una disposición equipada de múltiples motores fueraborda, en la que dos o más motores fueraborda están unidos uno al lado de otro a la popa. En este caso, se proporciona una ECU de controlador remoto para cada motor fueraborda, y a cada ECU de motor fueraborda se conecta la ECU de controlador remoto correspondiente a través de un bus de comunicación. Por tanto, se proporcionan buses de comunicación de un número que corresponde al número de motores fueraborda.
Cuando se produce una desconexión u otro fallo en el bus de comunicación, la información de control de maniobra de embarcación marina (orden de grado de apertura del acelerador, orden de posición de cambio, orden de ángulo de gobierno, etc.) no puede proporcionarse desde la ECU de controlador remoto o la ECU de gobierno a la ECU de motor fueraborda. Por tanto, en la publicación de solicitud de patente estadounidense n.° US 2007/082567 A1, el bus de comunicación está dispuesto como sistema doble. Es decir, la conexión entre una ECU de controlador remoto y una ECU de motor fueraborda se establece mediante dos buses de comunicación. Por tanto, incluso cuando se produce un fallo en uno de los buses de comunicación, la comunicación entre las ECU puede realizarse a través del otro bus de comunicación.
SUMARIO DE LA INVENCIÓN
Los inventores de realizaciones preferidas de la presente invención descrita y reivindicada en la presente solicitud llevaron a cabo un estudio y una investigación amplios con respecto a un sistema de control de embarcación marina, tal como el descrito anteriormente, y así, descubrieron y reconocieron por primera vez nuevos desafíos únicos y posibilidades no reconocidas previamente para mejoras tal como se describirá en mayor detalle a continuación.
Es decir, el número de componentes es alto con la disposición descrita anteriormente en la que se proporciona un bus de comunicación para cada uno de una pluralidad de motores fueraborda. Por tanto, se complica el trabajo de cableado para construir el sistema de control de embarcación marina y por consiguiente el tiempo de trabajo es largo. Además, el trabajo de cableado complejo tiende a provocar errores de cableado por parte de un trabajador de cableado y tiende a ocasionar una pérdida de función debido a los errores en el trabajo de cableado. Por tanto, se genera un nuevo trabajo de cableado, etc., y la eficacia del trabajo se vuelve deficiente.
Por tanto, puede considerarse una disposición de un bus de comunicación... [Seguir leyendo]
Reivindicaciones:
1. Sistema de control de embarcación marina para una embarcación (1, 101) marina que incluye al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina, estando el sistema de control de embarcación marina caracterizado porque comprende:
una unidad (60, 60M, 60S) de control que incluye una sección (P1) de salida principal dispuesta para 5 emitir información de control de maniobra de embarcación marina que incluye información de inicio del al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina, y una subsección (P2) de salida dispuesta para emitir información de copia de seguridad que incluye la información de inicio del al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina;
un primer bus (71) de comunicación conectado al al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de 10 propulsión de embarcación marina y la unidad (60, 60M, 60S) de control, y dispuesto para transmitir la información de control de maniobra de embarcación marina, emitida desde la sección (P1) de salida principal, al al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina;
un segundo bus (72) de comunicación conectado al al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina y la unidad (60, 60M, 60S) de control, y dispuesto para transmitir la 15 información de copia de seguridad, emitida desde la subsección (P2) de salida, al al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina; y
una sección (72a) de conexión de dispositivo auxiliar prevista en el segundo bus (72) de comunicación, y dispuesta para permitir la conexión de un dispositivo (80, 90) auxiliar que ejecuta la comunicación, en relación con información auxiliar distinta de la información de control de maniobra de embarcación marina, 20 con al menos uno del dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina y la unidad (60, 60M, 60S) de control a través del segundo bus (72) de comunicación.
2. Sistema de control de embarcación marina según la reivindicación 1, en el que la subsección (P2) de salida está dispuesta para emitir la información de copia de seguridad que es menor en volumen de información por unidad de tiempo que la información de control de maniobra de embarcación marina emitida 25 por la sección (P1) de salida principal.
3. Sistema de control de embarcación marina según la reivindicación 2, en el que la subsección (P2) de salida está dispuesta para emitir la información de copia de seguridad en un ciclo de comunicación que es más largo que un ciclo de comunicación en el que la sección (P1) de salida principal emite la información de control de maniobra de embarcación marina. 30
4. Sistema de control de embarcación marina según una cualquiera de las reivindicaciones 1-3, en el que la embarcación (1, 101) marina incluye una pluralidad de los dispositivos (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina, y cada uno de la pluralidad de dispositivos (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina está conectado al primer bus (71) de comunicación y el segundo bus (72) de comunicación. 35
5. Sistema de control de embarcación marina según la reivindicación 4, en el que la subsección (P2) de salida está dispuesta para transmitir la información de copia de seguridad a través del segundo bus (72) de comunicación sólo a algunos de los dispositivos de propulsión de embarcación marina entre la pluralidad de dispositivos (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina.
6. Sistema de control de embarcación marina según la reivindicación 5, en el que el sistema de 40 control de embarcación marina está previsto en una embarcación (1, 101) marina en la que un número impar, no menor de tres, de los dispositivos (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina están unidos en alineación en una única fila a lo largo de una dirección derecha/izquierda de un casco (2, 102) , y la subsección (P2) de salida está dispuesta para emitir, como información de copia de seguridad, una orden para un único dispositivo (3C) de propulsión de embarcación marina dispuesto en el 45 centro de la única fila.
7. Sistema de control de embarcación marina según la reivindicación 5, en el que el sistema de control de embarcación marina está previsto en una embarcación (1, 101) marina en la que un número par, no menor de cuatro, de los dispositivos (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina están unidos en alineación en una única fila a lo largo de una dirección derecha/izquierda de un casco (2, 50 102) , y la subsección (P2) de salida está dispuesta para emitir, como información de copia de seguridad, una orden para dos dispositivos (3CR, 3CL) de propulsión de embarcación marina dispuestos en el centro de la única fila.
8. Sistema de control de embarcación marina según la reivindicación 5, en el que el sistema de control de embarcación marina está previsto en una embarcación (1, 101) marina en la que no menos de 55 tres de los dispositivos (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina están unidos en
alineación en una única fila a lo largo de una dirección derecha/izquierda de un casco (2, 102) , y la subsección (P2) de salida está dispuesta para emitir, como información de copia de seguridad, una orden de lado de babor para el dispositivo (3L) de propulsión de embarcación marina en un lado más a babor de la única fila y una orden de lado de estribor para el dispositivo (3R) de propulsión de embarcación marina en un lado más a estribor de la única fila. 5
9. Sistema de control de embarcación marina según la reivindicación 5, en el que la sección (P1) de salida principal está dispuesta para emitir información de control de maniobra de embarcación marina para algunos de los dispositivos de propulsión de embarcación marina entre la pluralidad de dispositivos (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina, y la subsección (P2) de salida está dispuesta para emitir, como información de copia de seguridad, órdenes a los dispositivos de propulsión de 10 embarcación marina distintos de los dispositivos de propulsión de embarcación marina que están sujetos a la información de control de maniobra de embarcación marina.
10. Sistema de control de embarcación marina según la reivindicación 9, en el que el número de la pluralidad de dispositivos (3R, 3C, 3L) de propulsión de embarcación marina no es menos de tres, y la sección (P1) de salida principal está dispuesta para emitir la información de control de maniobra de 15 embarcación marina que incluye una orden de lado más a babor para el dispositivo (3L) de propulsión de embarcación marina en el lado más a babor y una orden de lado más a estribor para el dispositivo (3R) de propulsión de embarcación marina en el lado más a estribor.
11. Sistema de control de embarcación marina según una cualquiera de las reivindicaciones 1-10, en el que la embarcación (101) marina incluye un único compartimento (5M) de maniobra de embarcación 20 marina principal y no menos de un subcompartimento (5S) de maniobra de embarcación marina, una pluralidad de las unidades (60, 60M, 60S) de control están previstas respectivamente en la pluralidad de compartimentos (5M, 5S) de maniobra de embarcación marina, y el primer bus (71) de comunicación y el segundo bus (72) de comunicación están conectados a la pluralidad de unidades (60, 60M, 60S) de control.
12. Sistema de control de embarcación marina según la reivindicación 11, en el que la unidad (60M) de 25 control del compartimento (5M) de maniobra de embarcación marina principal está dispuesta para emitir la información de copia de seguridad al segundo bus (72) de comunicación, y la unidad (60M) de control de cada subcompartimento (5S) de maniobra de embarcación marina está dispuesta para no emitir la información de copia de seguridad.
13. Sistema de control de embarcación marina según la reivindicación 11 ó 12, que comprende 30 además una unidad de conmutación dispuesta para funcionar de manera que si la maniobra de embarcación marina se realiza en el subcompartimento (5S) de maniobra de embarcación marina cuando se produce un fallo en el primer bus (71) de comunicación, el dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina se controla para detener la embarcación (101) marina y el compartimento en el que se realiza la maniobra de embarcación marina se conmuta desde el 35 subcompartimento (5S) de maniobra de embarcación marina al compartimento (5M) de maniobra de embarcación marina principal.
14. Sistema de propulsión de embarcación marina que comprende:
al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina;
el sistema de control de embarcación marina para una embarcación marina según una cualquiera de las 40 reivindicaciones 1-13; y un dispositivo (80, 90) auxiliar conectado a la sección (72a) de conexión de dispositivo auxiliar, y dispuesto para ejecutar una comunicación, en relación con información auxiliar distinta de la información de control de maniobra de embarcación marina, con al menos uno del al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina y la unidad (60, 60M, 60S) de control a través del segundo bus (72) de comunicación. 45
15. Embarcación (1, 101) marina que comprende:
un casco (2, 102) ;
al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina unido al casco (2, 102) ;
el sistema de control de embarcación marina para una embarcación marina según una cualquiera de las 50 reivindicaciones 1-13; y
un dispositivo (80, 90) auxiliar conectado a la sección (72a) de conexión de dispositivo auxiliar, y dispuesto para ejecutar una comunicación, en relación con información auxiliar distinta de la información de control de maniobra de embarcación marina, con al menos uno del al menos un dispositivo (3, 3R, 3C, 3L, 3CR, 3CL) de propulsión de embarcación marina y la unidad (60, 60M, 60S) de control a través del segundo bus (72) de comunicación.
Patentes similares o relacionadas:
Sistema de control predictivo, del 24 de Junio de 2020, de KONGSBERG MARITIME AS: Un sistema para reducir la variación de frecuencia o tensión en el sistema de distribución de energía de una embarcación marina, comprendiendo el sistema: un sistema de control […]
Equipo de suministro de energía y propulsor para barcos, del 20 de Mayo de 2020, de ANDERSEN, PETER: Equipo de suministro de energía y propulsor para barcos, con unidades de generador diésel , por medio las cuales puede generarse energía […]
Sistema de gestión de energía eléctrica de un buque, del 4 de Marzo de 2020, de SIEMENS AKTIENGESELLSCHAFT: Un sistema de gestión de energía eléctrica de un buque para controlar el suministro de potencia a y desde un sistema de propulsión de un buque, comprendiendo el sistema de […]
Sistema de propulsión para asistencia al remado en la práctica de surf, del 1 de Agosto de 2019, de BAENA ALDAMA,JAVIER: Sistema de propulsión para asistencia al remado en la práctica de surf: que comprende un dispositivo propulsor , tipo hidrojet, destinado […]
Unidad de frenado y de enclavamiento para transmisor de mandos, del 29 de Noviembre de 2018, de Aventics GmbH: Unidad de frenado y de enclavamiento para un transmisor de mandos, comprendiendo un rotor exterior (1, 1') con una abertura circular que […]
Disposición para averiguar una fuerza que actúa sobre un timón, del 6 de Diciembre de 2017, de Becker Marine Systems GmbH: Sistema de posicionamiento dinámico para el posicionamiento automático de un vehículo acuático, en particular un barco, con un timón […]
 Procedimiento operativo para un buque con accionamiento eléctrico y accionamiento adicional de los motores de combustión, así como buque adecuado para ejecutar el procedimiento, del 28 de Enero de 2016, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para operar un buque , con
- al menos un motor eléctrico como máquina principal para accionar el buque , donde el […]
Procedimiento operativo para un buque con accionamiento eléctrico y accionamiento adicional de los motores de combustión, así como buque adecuado para ejecutar el procedimiento, del 28 de Enero de 2016, de SIEMENS AKTIENGESELLSCHAFT: Procedimiento para operar un buque , con
- al menos un motor eléctrico como máquina principal para accionar el buque , donde el […]