Procedimiento y dispositivo para determinar la ubicación relativa, la velocidad y/o la aceleración de un cuerpo.
Procedimiento para determinar la ubicación relativa, la velocidad y/o la aceleración de un cuerpo (1) movible en unespacio tridimensional,
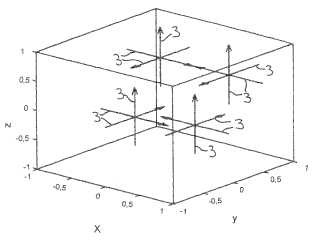
en donde se provee un número de n sensores de aceleración lineal (2) que tienen, cada uno,un eje de medición (3) sensible, en donde el número n es al menos doce, en donde los sensores individuales deaceleración lineal (2) están dispuestos, cada uno, en una posición Pi de ubicación fija en relación con el cuerpo (1)que se puede describir a través de un vector de posición estacionario , que apunta desde un punto dereferencia (4) fijo en el cuerpo hacia la correspondiente posición Pi, en donde los sensores de aceleración lineal (2)se alinean de manera que su eje de medición (3) está orientado, en cada caso, en dirección de un vector dedirección , en donde i ε [1, 2, 3, 4, ... n] indican, en cada caso, el correspondiente sensor deaceleración lineal (2) y x, y, z, ejes de un sistema de coordenadas fijo en el cuerpo que se extienden a través delpunto de referencia (4), en donde los vectores de posición y los vectores de dirección se seleccionan demanera que el rango de una matriz de doce columnas formada por los vectores columna.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/004749.
Solicitante: Albert-Ludwigs-Universität Freiburg.
Nacionalidad solicitante: Alemania.
Dirección: Fahnenbergplatz 79098 Freiburg ALEMANIA.
Inventor/es: PETERS,CHRISTIAN, BUHMANN,ALEXANDER, MANOLI,YIANNOS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › G01C 21/00 Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968). › mediante la integración de la aceleración o la velocidad, p. ej. navegación inercial.
- G01P15/08 G01 […] › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 15/00 Medida de la aceleración; Medida de la deceleración; Medida de los choques, es decir, de una variación brusca de la aceleración. › con conversión en valores eléctricos o magnéticos.
- G01P15/18 G01P 15/00 […] › en dos o más dimensiones.
PDF original: ES-2435524_T3.pdf
Fragmento de la descripción:
Procedimiento y dispositivo para determinar la ubicación relativa, la velocidad y/o la aceleración de un cuerpo La invención se refiere a un procedimiento para determinar la ubicación relativa, la velocidad y/o la aceleración de un cuerpo movible en un espacio tridimensional, en donde se facilita un número de sensores de aceleración lineal que tienen cada uno un eje de medición sensible y en donde los sensores individuales de aceleración lineal se disponen, cada uno, en una posición Pi fija con respecto al cuerpo. Además, la invención se refiere a un dispositivo para determinar la ubicación relativa, la velocidad y/o la aceleración de un cuerpo en un espacio tridimensional, en donde
el dispositivo para la captación de al menos una señal de medición de aceleración = (a1, a2, a3, a4, ... an) presenta un número de sensores de aceleración lineal dispuestos de manera fija con respecto al cuerpo.
A este respecto, por una ubicación relativa se entiende una ubicación referida a una posición de referencia, tal como, por ejemplo, una posición inicial. Por un sensor de aceleración lineal se entiende un sensor de aceleración unidireccional que es sensible a aceleraciones que tienen al menos una componente que se encuentra en el eje de medición del sensor de aceleración lineal. Los sensores de aceleración lineal pueden estar dispuestos, separados constructivamente unos de otros, cada uno en una carcasa propia. Pero también es posible que estén integrados sensores de aceleración lineal que presentan al menos dos y, en particular, tres ejes de medición diferentes como sensor de aceleración multidireccional en un elemento estructural eléctrico o electrónico común.
Por el documento DE 199 62 687 A1 son conocidos un procedimiento y un dispositivo para determinar la velocidad angular de un cuerpo giratorio, concretamente de un vehículo a motor. Para medir una señal de medición de aceleración se colocan en el cuerpo en cuatro posiciones separadas entre sí en total nueve sensores de aceleración lineal que tienen cada uno un eje de medición sensible que se extiende a través de la posición correspondiente. En una primera posición que está dispuesta en el origen de un sistema de coordenadas fijo en el cuerpo están previstos tres sensores de aceleración lineal que están orientados cada uno con su eje de medición sensible en dirección de uno de los ejes x, y, z del sistema de coordenadas fijo en el cuerpo. En una segunda posición que está dispuesta a una distancia r1 del origen sobre el eje y están dispuestos dos sensores lineales adicionales, de los cuales uno está orientado con su eje de medición en dirección z y el otro, con su eje de medición en dirección x. En una tercera posición que está dispuesta a una distancia r2 del origen sobre el eje x están previstos dos sensores lineales adicionales, de los cuales uno está orientado con su eje de medición en dirección y y el otro, en dirección z. De manera correspondiente, en una cuarta posición dispuesta en el eje z a una distancia r3 del origen están previstos dos sensores lineales que están orientados en dirección x e y. Para la aceleración ͞a en un punto P discrecional se aplica:
A este respecto significan:
A la aceleración del origen del sistema de coordenadas fijo en el cuerpo, el tiempo,
la velocidad angular del cuerpo y el vector de posición que apunta desde el origen del sistema de coordenadas fijo en el cuerpo hacia el punto P.
A este respecto se trata de un sistema de ecuación diferencial tridimensional no lineal que no se puede resolver de manera analítica en general. Por lo tanto, la determinación de la velocidad angular del cuerpo giratorio hace necesario un esfuerzo de cálculo relativamente grande. Por consiguiente, el dispositivo que trabaja de acuerdo con el procedimiento es correspondientemente complicado, caro y, a pesar de eso, la mayoría de las veces, inexacto.
Ciertamente, por el documento DE 199 62 687 A1 ya se conoce también un procedimiento en el que se mide la aceleración angular ͞ωx del cuerpo alrededor del eje x con ayuda de solo cuatro sensores de aceleración lineal montados de manera fija en el cuerpo. A este respecto, dos sensores de aceleración lineal están dispuestos en el origen del sistema de coordenadas fijo en el cuerpo, en donde un primer sensor de aceleración lineal está orientado con su eje de medición en dirección del eje y, y un segundo sensor de aceleración lineal, con su eje de medición en dirección del eje z. Un tercer sensor de aceleración lineal está dispuesto en el eje y a una distancia r1 del origen y está alineado en dirección del eje z. Un cuarto sensor de aceleración lineal está dispuesto en el eje z a una distancia
r3 del origen y está orientado con su eje de medición sensible en dirección del eje y. Si se insertan las posiciones de los cuatro sensores de aceleración lineal en la ecuación (2) , se obtiene, después de la transformación algebraica:
en donde az0, az1, ay0, ay1 representan los valores de medición de los cuatro sensores de aceleración lineal. Sin embargo, la ecuación (3) se aplica solamente para el caso especial en el que el primer y el tercer sensor de aceleración lineal con su eje de medición están orientados cada uno exactamente en dirección y y los otros dos sensores de aceleración lineal, con sus ejes de medición en ángulo recto con respecto a esto en dirección z. El artículo "Demonstration of a methodology for wheelchair acceleration analysis" de D. P. Van Sickle et al, publicado en Engineering In Medicine And Biology Society (páginas 1301 y 1302) describe un procedimiento y un dispositivo para la navegación inercial. Doce sensores de aceleración lineal se disponen cada uno en una posición fija con respecto a un cuerpo movible, que se puede describir a través de un vector de posición estacionario, y con una orientación del eje de medición que se puede describir a través de un vector de dirección. A partir de las señales de medición de aceleración y las magnitudes características correspondientes a los vectores de posición y de dirección se forma una señal de ubicación, velocidad y/o aceleración para el cuerpo. Sin embargo, la disposición en ángulo recto de los sensores de aceleración lineal es problemática en la práctica, ya que durante la producción y el montaje de los sensores de aceleración lineal aparecen tolerancias de fabricación y colocación en el cuerpo. Principalmente debido al montaje de los sensores de aceleración lineal en el cuerpo se producen casi forzosamente desviaciones en la alineación y la colocación. Incluso desviaciones pequeñas de la ubicación de los sensores de aceleración lineal de la disposición de sensores, en la que se basa la ecuación (3) , pueden conducir a errores relativamente grandes durante el cálculo de la aceleración angular ͞
ωx. Esto es, en particular, desventajoso cuando se integra la señal de aceleración angular para determinar la ubicación del cuerpo y, a este respecto, se suman los errores sin restricciones. El último punto en particular ha sido decisivo para que no se hayan impuesto hasta ahora dispositivos para determinar la ubicación que trabajan solamente con sensores de aceleración lineal.
Por lo tanto, existe el objetivo de crear un procedimiento y un dispositivo del tipo mencionado inicialmente que posibiliten, de manera sencilla, una determinación exacta de la ubicación, la velocidad y/o la aceleración de un cuerpo.
Este objetivo se resuelve en cuanto al procedimiento facilitándose un número de n sensores de aceleración lineal que tienen, cada uno, un eje de medición sensible, ascendiendo el número n al menos a doce, disponiéndose los sensores individuales de aceleración lineal, cada uno, en una posición P i fija con respecto al cuerpo, que se puede describir a través de un vector de posición estacionario = (rxi, r y i, rzi) que apunta desde un punto de referencia fijo en el cuerpo hacia la correspondiente posición Pi, en donde los sensores de aceleración lineal se alinean de tal
manera que su eje de medición, en cada caso, está orientado en dirección de un vector de dirección = (!xi, !yi, !zi) , indicando i ∀ [1, 2, 3, 4, ... n], en cada caso, el sensor correspondiente de aceleración lineal y x, y, z, ejes que se extienden a través del punto de referencia de un sistema de coordenadas fijo en el cuerpo, seleccionándose los
vectores de posición y los vectores de dirección de manera que el rango de una matriz de doce columnas formada por los vectores columna es igual a doce, captándose con ayuda de los sensores de aceleración lineal al menos una señal de medición de aceleración a = (a͞1, a2, a3, a4, ... an) y formándose a partir... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para determinar la ubicación relativa, la velocidad y/o la aceleración de un cuerpo (1) movible en un espacio tridimensional, en donde se provee un número de n sensores de aceleración lineal (2) que tienen, cada uno, un eje de medición (3) sensible, en donde el número n es al menos doce, en donde los sensores individuales de aceleración lineal (2) están dispuestos, cada uno, en una posición Pi de ubicación fija en relación con el cuerpo (1)
que se puede describir a través de un vector de posición estacionario , que apunta desde un punto de referencia (4) fijo en el cuerpo hacia la correspondiente posición Pi, en donde los sensores de aceleración lineal (2) se alinean de manera que su eje de medición (3) está orientado, en cada caso, en dirección de un vector de
dirección , en donde i ∀ [1, 2, 3, 4, ... n] indican, en cada caso, el correspondiente sensor de aceleración lineal (2) y x, y, z, ejes de un sistema de coordenadas fijo en el cuerpo que se extienden a través del punto de referencia (4) , en donde los vectores de posición y los vectores de dirección se seleccionan de manera que el rango de una matriz de doce columnas formada por los vectores columna es igual a doce, en donde con ayuda de los sensores de aceleración lineal (2) se capta al menos una señal de
medición de aceleración y en donde a partir de la señal de medición de aceleración y magnitudes características que describen la ubicación relativa y la orientación de los sensores de aceleración lineal (2) en el 5 sistema de coordenadas fijo en el cuerpo se forma una señal de ubicación, de velocidad y/o de aceleración para el cuerpo (1) .
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque después de disponer los sensores de aceleración lineal (2) en las posiciones Pi se realizan al menos cinco mediciones, en las que el cuerpo (1) en relación con un sistema de coordenadas fijo en la Tierra se acelera en diferentes direcciones conocidas linealmente y/o alrededor de al menos un centro de giro conocido, porque en cada medición se capta, en cada caso, una señal de
medición de aceleración y porque a partir de las señales de medición de aceleración y las direcciones y/o el al menos un centro de giro se determinan las magnitudes características para la ubicación y la orientación de los sensores de aceleración lineal (2) .
3. Procedimiento de acuerdo con la reivindicación 1 o 2, caracterizado porque a partir de la señal de velocidad se 15 determina la ubicación relativa de un centro de giro alrededor del cual gira el cuerpo en el espacio.
4. Dispositivo para determinar la ubicación relativa, la velocidad y/o la aceleración de un cuerpo (1) movible en un espacio tridimensional, en donde el dispositivo para captar al menos una señal de medición de aceleración presenta un número de n sensores de aceleración lineal (2) dispuestos en una ubicación fija con respecto al cuerpo (1) , en donde el número n es al menos doce, en donde las posiciones Pi en las que están 20 dispuestos los sensores de aceleración lineal (2) se pueden describir, en cada caso, a través de un vector de
posición estacionario que apunta desde un punto de referencia (4) fijo en el cuerpo hacia la correspondiente posición Pi, en donde los sensores de aceleración lineal (2) presentan, cada uno, un eje de medición (3) sensible que está orientado en dirección de un vector de dirección , en donde i ∀ [1, 2, 3,
4, ... n] indican, en cada caso, el correspondiente sensor de aceleración lineal (2) y x, y, z, ejes de un sistema de coordenadas fijo en el cuerpo que se extienden a través del punto de referencia (4) , en donde los vectores de
posición y los vectores de dirección están seleccionados de manera que el rango de una matriz de doce columnas formada por los vectores columna es igual a doce y en donde los sensores de aceleración lineal (2) están unidos con un dispositivo de evaluación (8) que está configurado para formar una señal de ubicación, de velocidad y/o de aceleración para el cuerpo (1) a partir
de la señal de medición de aceleración y magnitudes características que describen la ubicación relativa y la orientación de los sensores de aceleración lineal (2) en el sistema de coordenadas fijo en el cuerpo.
5. Dispositivo de acuerdo con la reivindicación 4, caracterizado porque el dispositivo de evaluación presenta una memoria de datos (9) en la que está guardada al menos una señal de magnitud característica para un vector de vectores columna 6. Dispositivo de acuerdo con la reivindicación 5, caracterizado porque el dispositivo de evaluación (8) presenta medios para la formación de al menos una primera señal de producto escalar correspondiente al producto escalar de la al menos una señal de magnitud característica y la señal de medición de aceleración y porque la al menos una
señal de magnitud característica está seleccionada de manera que la al menos una primera señal de producto escalar se corresponde con un componente vectorial de la aceleración de traslación del cuerpo (1) .
7. Dispositivo de acuerdo con la reivindicación 5 o 6, caracterizado porque el dispositivo de evaluación (8) presenta medios para formar al menos una segunda señal de producto escalar correspondiente al producto escalar de la al
menos una señal de magnitud característica y la señal de medición de aceleración y porque la al menos una señal de magnitud característica está seleccionada de tal manera que la segunda señal de producto escalar se corresponde con un componente vectorial de la aceleración angular del cuerpo (1) .
8. Dispositivo de acuerdo con una de las reivindicaciones 5 a 7, caracterizado porque el dispositivo de evaluación (8) presenta medios para eventualmente integrar por duplicado la al menos una segunda señal de producto escalar.
9. Dispositivo de acuerdo con la reivindicación 5 a 8, caracterizado porque el dispositivo de evaluación (8) presenta medios para formar al menos una tercera señal de producto escalar correspondiente al producto escalar de la al
menos una señal de magnitud característica y la señal de medición de aceleración , porque la al menos una señal de magnitud característica está seleccionada de manera que la tercera señal de producto escalar se corresponde con el cuadrado de un componente vectorial de la velocidad angular del cuerpo (1) y porque el dispositivo de evaluación (8) presenta medios para formar una señal de raíz cuadrada a partir de la señal de producto escalar.
10. Dispositivo de acuerdo con una de las reivindicaciones 5 a 9, caracterizado porque el dispositivo de evaluación
(8) presenta medios para formar al menos una cuarta señal de producto escalar correspondiente al producto escalar
de la al menos una señal de magnitud característica y la señal de medición de aceleración , porque la al menos una señal de magnitud característica está seleccionada de manera que la cuarta señal de producto escalar se corresponde con el producto de dos componentes vectoriales diferentes de la velocidad angular del cuerpo (1) , porque el dispositivo de evaluación (8) presenta medios para integrar las segundas señales de producto escalar determinadas, en cada caso, para el componente vectorial correspondiente y para formar al menos una señal de producto a partir de los resultados de estas integraciones, porque el dispositivo de evaluación (8) presenta un dispositivo de comparación para comparar el valor de esta señal de producto con la cuarta señal de producto escalar y porque el dispositivo de comparación tiene una salida para una señal de estado de error que depende del resultado de la comparación.
11. Dispositivo de acuerdo con la reivindicación 5 a 10, caracterizado porque el dispositivo de comparación está configurado para comparar la señal de raíz cuadrada con la señal formada a través de la integración de la al menos una segunda señal de producto escalar y porque el dispositivo de comparación tiene una salida para una señal de estado de error que depende del resultado de la comparación.
12. Dispositivo de acuerdo con la reivindicación 5 a 11, caracterizado porque el dispositivo de evaluación presenta medios para la integración de la segunda señal de producto escalar y para formar el cuadrado a partir del resultado de esta integración, porque estos medios para comparar la señal así obtenida con la tercera señal de producto escalar están unidos con el dispositivo de comparación y porque el dispositivo de comparación tiene una salida para una señal de estado de error que depende del resultado de la comparación.
13. Dispositivo de acuerdo con la reivindicación 5 a 12, caracterizado porque el dispositivo de evaluación para diferenciar la señal de raíz cuadrada presenta un dispositivo de diferenciación, porque el dispositivo de diferenciación para comparar la señal diferenciada con la segunda señal de producto escalar está unido con el dispositivo de comparación y porque el dispositivo de comparación tiene una salida para una señal de estado de error que depende del resultado de la comparación.
14. Dispositivo de acuerdo con la reivindicación 4 a 12, caracterizado porque el dispositivo de evaluación (8) está configurado de manera que durante un movimiento de giro del cuerpo alrededor de un centro de giro determina a partir de la señal de velocidad una señal para la ubicación relativa de un centro de giro.
15. Dispositivo de acuerdo con una de las reivindicaciones 4 a 14, caracterizado porque comprende el cuerpo (1) y porque el cuerpo (1) es un vehículo a motor.
Patentes similares o relacionadas:
Generación de estimación de la gravedad de la Tierra, del 3 de Junio de 2020, de Helsingin Yliopisto: Un procedimiento para generar estimaciones de la gravedad de la Tierra para períodos de tiempo secuenciales, en el que el procedimiento, llevado a cabo por un aparato , […]
Procedimiento y dispositivo para determinar parámetros de medición inerciales, del 6 de Mayo de 2020, de MBDA Deutschland GmbH: Procedimiento para determinar los parámetros de medición inerciales mediante una unidad de medición inercial que presenta sensores inerciales , donde al […]
Método y sistema de navegación inercial asistido por GPS, del 18 de Marzo de 2020, de IMI Systems Ltd: Un método de navegación inercial asistido por GPS que comprende: proporcionar múltiples sensores que incluyen múltiples unidades de medición de inercia (IMU) y al menos […]
Dispositivo y procedimiento de mantenimiento de actitud de un portador que utiliza girómetros, del 18 de Marzo de 2020, de Safran Electronics & Defense: Dispositivo de mantenimiento de actitud de un portador, comprendiendo el dispositivo: · tres girómetros primarios dispuestos […]
 Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Procedimiento de estimación del movimiento de un peatón, del 25 de Diciembre de 2019, de SYSNAV: Procedimiento de estimación del movimiento de un peatón en marcha que comprende las etapas de:
(a) medir una aceleración y una velocidad […]
Localización dentro de un entorno usando fusión de sensores, del 4 de Diciembre de 2019, de THE BOEING COMPANY: Un aparato que comprende: una pluralidad de sistemas de datos configurados para generar una pluralidad de flujos de datos en la cual la pluralidad de flujos […]
Procedimiento de gestión automática de un girómetro longitudinal montado en un aparato volador, del 20 de Noviembre de 2019, de MBDA FRANCE: Procedimiento de gestión automática de un girómetro longitudinal que está montado sobre un misil aéreo, susceptible de ser puesto en rotación, procedimiento […]
Ayudas de navegación para sistemas aéreos no tripulados en un entorno sin GPS, del 13 de Noviembre de 2019, de THE BOEING COMPANY: Método para estimar una posición o trayectoria de una aeronave en un entorno sin GPS que comprende: obtener, mediante un sistema de navegación inercial, una […]