Vehículo con una transmisión variable y una unidad para detectar anomalías en el sistema de detección de la velocidad.
Un controlador para un vehículo (1) que tiene:
una rueda de motriz (3);
una fuente de motriz (10) para producir una fuerza de giro;
una transmisión continuamente variable ( 20) que tiene un eje de entrada (21d) conectado a la fuente de motriz(10) y un eje de salida (22d) conectado a la rueda de motriz (3), en el que una relación de cambio de marchasentre el eje de entrada (21d) y el eje de salida (22d) está controlada electrónicamente; y
un sistema de detección de la velocidad del vehículo (42) para emitir una señal de velocidad del vehículo; yun sensor de velocidad de giro para detectar al menos uno de una velocidad de giro de la fuente de motriz (10),una velocidad de giro del eje de entrada (21d), o una velocidad de giro del eje de salida (22d);
caracterizado porque
una anomalía en el sistema de detección de la velocidad del vehículo (42) ha sido detectada independiente dela relación de cambio de marchas en base a la señal de la velocidad del vehículo que se envía desde elsistema de detección de la velocidad del vehículo (42) y al menos un valor de una velocidad de giro de lafuente de motriz (10), una velocidad de giro del eje de entrada (21d), y una velocidad de giro del eje de salida(22d); y
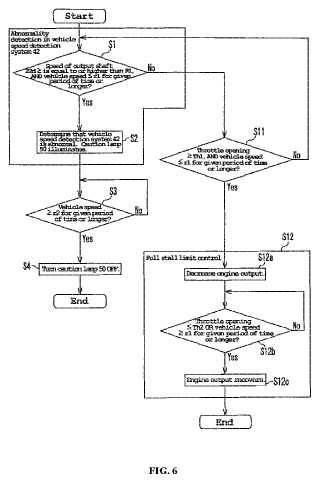
una anomalía en el sistema de detección de la velocidad del vehículo (42) ha sido detectada cuando lavelocidad de giro detectada por el sensor de velocidad de giro es igual o mayor que una velocidad de giropredeterminada, y ninguna señal de velocidad del vehículo ha sido enviada desde el sistema de detección develocidad del vehículo (42) durante un período de tiempo dado.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08250200.
Solicitante: YAMAHA HATSUDOKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 2500 SHINGAI IWATA-SHI, SHIZUOKA 438-8501 JAPON.
Inventor/es: NOGUCHI,TAKEHARU.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60W10/02 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60W CONTROL CONJUGADO DE VARIAS SUBUNIDADES DE UN VEHICULO DE DIFERENTE TIPO O FUNCION; SISTEMAS DE CONTROL ESPECIALMENTE ADAPTADOS PARA VEHICULOS HIBRIDOS; SISTEMAS DE CONTROL DE LA CONDUCCION DE VEHICULOS TERRESTRES NO RELACIONADOS CON EL CONTROL DE UNA SUBUNIDAD PARTICULAR. › B60W 10/00 Control conjugado de subunidades de vehículo de diferentes tipos o funciones (para propulsión de vehículos de tracción exclusivamente eléctrica con una fuente de energía interior al vehículo B60L 50/00 - B60L 58/00). › incluyendo el control de los acoplamientos de la cadena cinemática.
- B60W40/105 B60W […] › B60W 40/00 Cálculo o estimación de los parámetros de funcionamiento para el sistema de ayuda a la conducción de vehículos terrestres que no están relacionados con el control de una subunidad particular. › Velocidad.
- F16H61/12 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › Detección de un mal funcionamiento o de un mal funcionamiento potencial, p. ej. dispositivo de seguridad positiva (en el control de transmisiones hidrostáticas F16H 61/4192).
PDF original: ES-2391684_T3.pdf
Fragmento de la descripción:
Vehículo con una transmisión variable y una unidad para detectar anomalías en el sistema de detección de la velocidad
Campo de la invención
La presente invención se refiere a un vehículo, a un controlador para un vehículo, y a un procedimiento para detectar una anomalía del vehículo.
Antecedentes de la invención
Se han propuesto varios procedimientos para detectar una anomalía en un sensor de velocidad del vehículo. Por ejemplo, el documento JP-A-Hei 10-18896 desvela un procedimiento para detectar una anomalía en un sensor de velocidad del vehículo en base a una abertura del regulador y una velocidad del vehículo detectada por el sensor de velocidad del vehículo.
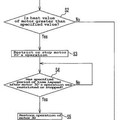
Específicamente, como se muestra en la Figura 8, el procedimiento para detectar una anomalía en el sensor de velocidad del vehículo, descrito en el documento JP-A-Hei 10-18896 , incluye la primera etapa S101 de comprobar si
o no un sensor de velocidad del motor y un sensor de abertura del regulador son normales. Si el sensor de abertura del regulador y similar, se determinan como normales, el procedimiento avanza a la etapa S102 para determinar si o no una palanca de cambio está situada en un matriz, y si o no la abertura del regulador es igual o mayor que una abertura predeterminada. Si se determina que la palanca de cambio está situada en el matriz y se determina que la abertura del regulador es igual o mayor que la abertura predeterminada, el procedimiento pasa a la etapa S103 para determinar si o no el sensor de velocidad del vehículo detecta una velocidad del vehículo de 0 km/h. Si el sensor de velocidad del vehículo detecta una velocidad del vehículo de 0 km/h, el procedimiento avanza a la etapa S104 para determinar si o no la velocidad del motor disminuye a una tasa dada. Después, si se determina que la velocidad del motor disminuye a una tasa dada, el procedimiento avanza a la etapa S105 para determinar si o no la abertura del regulador es constante. Si el resultado de la determinación muestra que la abertura del regulador es constante, se determina que hay un fallo en el sensor de velocidad del vehículo y en el cableado conectado al sensor de velocidad del vehículo.
El documento JP-A-Hei 10-18896 describe que el procedimiento anteriormente mencionado permite determinar con precisión si hay un fallo en el sistema de detección de vehículo.
Las transmisiones electrónicas continuamente variables (denominadas en lo sucesivo "ECVT") son conocidas.
Por lo general, en el vehículo montado con ECVT, una relación de cambio de marcha se controla en base a la velocidad del vehículo y la abertura del regulador. Por lo tanto, cuando se produce una anomalía en el sistema de detección de la velocidad del vehículo para detectar una velocidad del vehículo, puede haber una posibilidad de seleccionar una relación de cambio de marcha inadecuada. Esto puede resultar en una dificultad para un vehículo para alcanzar su motriz adecuado. Por lo tanto, para el vehículo montado con ECVT, se ha intensificado la necesidad de una detección temprana de una anomalía en el sistema de detección de la velocidad del vehículo.
Sin embargo, como se muestra en la Figura 8, a menos que la abertura del regulador sea igual o mayor que una abertura predeterminada, no se detecta una anomalía en el sistema de detección de la velocidad del vehículo utilizando el procedimiento para detectar una anomalía, que se describe en el documento JP-A-Hei 10-18896. Por lo tanto, una anomalía en el sistema de detección de la velocidad del vehículo no se puede detectar a tiempo.
Un sistema de detección del mal funcionamiento del sensor se describe en el documento GB 2 321 507. Este sistema describe el control de los valores de velocidad por revolución utilizando sensores para determinar si ha fallado un sensor de velocidad de revolución del motor, un sensor de velocidad de revolución del eje de entrada de la transmisión continuamente variable (CVT) , o un sensor de velocidad de revolución del eje de salida de la CVT, de acuerdo con los valores detectados de los sensores y un valor detectado de la relación de cambios instantánea. Si se establecen tres correlaciones predeterminadas, se determina que todos los sensores funcionan normalmente. Si no se establecen una o dos de las tres correlaciones, se identifica el fallo de uno de los tres sensores. Las tres correlaciones son: (1) NE = NPRI; (2) NPRI = NSEC x CN, y (3) NE = NPRI x CN, en las que NE es la velocidad de revolución del motor, NPRI es la velocidad de revolución del eje de entrada, CN relación de cambios, y NSEC es la velocidad de revolución del eje de salida.
La presente invención se deriva de los problemas anteriores, y un objeto de la invención es proporcionar un vehículo que tiene una ECVT, que permite la detección temprana de una anomalía en un sistema de detección de la velocidad del vehículo.
Sumario de la invención
Un vehículo de acuerdo con un primer aspecto de la invención incluye: una rueda de motriz; una fuente de motriz para producir una fuerza de giro; una transmisión continuamente variable, un sistema de detección de la velocidad del vehículo, y una unidad de control. La transmisión continuamente variable tiene un eje de entrada y un eje de salida. El eje de entrada está conectado a la fuente de motriz. El eje de salida está conectado a la rueda de motriz. En la transmisión continuamente variable, una relación de cambio de marchas entre el eje de entrada y el eje de salida se controla electrónicamente. El sistema de detección de la velocidad del vehículo emite una señal de velocidad del vehículo. La unidad de control detecta una anomalía en el sistema de detección de la velocidad de vehículo en base a al menos uno de una velocidad de giro de la fuente de motriz, una velocidad de giro del eje de entrada, y una velocidad de giro del eje de salida, así como en base a la señal de velocidad del vehículo emitida desde el sistema de detección de la velocidad del vehículo.
Un vehículo de acuerdo con un segundo aspecto de la invención incluye: una rueda de motriz; una fuente de motriz para producir una fuerza de giro; una transmisión continuamente variable, un sistema de detección de la velocidad del vehículo, un sensor de velocidad de giro, y una unidad de control. La transmisión continuamente variable tiene un eje de entrada conectado a la fuente de motriz y un eje de salida conectado a la rueda de motriz. En la transmisión continuamente variable, una relación de cambio de marchas entre el eje de entrada y el eje de salida se controla electrónicamente. El sistema de detección de la velocidad del vehículo emite una señal de velocidad del vehículo. El sensor de velocidad de giro detecta una velocidad de giro de la fuente de motriz, una velocidad de giro del eje de entrada, o una velocidad de giro del eje de salida. La unidad de control detecta una anomalía en el sistema de detección de la velocidad del vehículo, cuando el giro detectada por el sensor de velocidad de giro es igual o mayor que una velocidad de giro predeterminada, y la señal de velocidad del vehículo, ha sido enviada desde el sistema de detección de la velocidad de vehículo durante un período de tiempo dado.
Un vehículo de acuerdo con un tercer aspecto de la invención incluye: una rueda de motriz; una fuente de motriz para producir una fuerza de giro; una transmisión continuamente variable, un sistema de detección de la velocidad del vehículo, un sensor de velocidad de giro, y una unidad de control. La transmisión continuamente variable tiene un eje de entrada conectado a la fuente de motriz y un eje de salida conectado a la rueda de motriz. En la transmisión continuamente variable, una relación de cambio de marchas entre el eje de entrada y el eje de salida se controla electrónicamente. El sistema de detección de la velocidad del vehículo detecta una velocidad del vehículo. El sistema de detección de la velocidad del vehículo emite la velocidad del vehículo detectada como una señal de velocidad del vehículo. El sensor de velocidad de giro detecta una velocidad de giro de la fuente de motriz, una velocidad de giro del eje de entrada, o una velocidad de giro del eje de salida. La unidad de control detecta una anomalía en el sistema de detección de la velocidad del vehículo, cuando un valor, que se obtiene dividiendo la velocidad del vehículo entre la velocidad de giro detectada por el sensor de velocidad de giro, se mantiene igual o menor que un valor predeterminado durante un período de tiempo dado.
Un... [Seguir leyendo]
Reivindicaciones:
1. Un controlador para un vehículo (1) que tiene:
una rueda de motriz (3) ; una fuente de motriz (10) para producir una fuerza de giro; una transmisión continuamente variable (20) que tiene un eje de entrada (21d) conectado a la fuente de motriz
(10) y un eje de salida (22d) conectado a la rueda de motriz (3) , en el que una relación de cambio de marchas entre el eje de entrada (21d) y el eje de salida (22d) está controlada electrónicamente; y un sistema de detección de la velocidad del vehículo (42) para emitir una señal de velocidad del vehículo; y un sensor de velocidad de giro para detectar al menos uno de una velocidad de giro de la fuente de motriz (10) , una velocidad de giro del eje de entrada (21d) , o una velocidad de giro del eje de salida (22d) ;
caracterizado porque
una anomalía en el sistema de detección de la velocidad del vehículo (42) ha sido detectada independiente de la relación de cambio de marchas en base a la señal de la velocidad del vehículo que se envía desde el sistema de detección de la velocidad del vehículo (42) y al menos un valor de una velocidad de giro de la fuente de motriz (10) , una velocidad de giro del eje de entrada (21d) , y una velocidad de giro del eje de salida (22d) ; y una anomalía en el sistema de detección de la velocidad del vehículo (42) ha sido detectada cuando la velocidad de giro detectada por el sensor de velocidad de giro es igual o mayor que una velocidad de giro predeterminada, y ninguna señal de velocidad del vehículo ha sido enviada desde el sistema de detección de velocidad del vehículo (42) durante un período de tiempo dado.
2. Un vehículo (1) que comprende:
una rueda de motriz (3) ; una fuente de motriz (10) para producir una fuerza de giro; una transmisión continuamente variable (20) que tiene un eje de entrada (21d) conectado a la fuente de motriz
(10) y un eje de salida (22d) conectado a la rueda de motriz (3) , en el que una relación de cambio de marchas entre el eje de entrada (21d) y el eje de salida (22d) está controlada electrónicamente; y un sistema de detección de la velocidad del vehículo (42) para emitir una señal de velocidad del vehículo; un sensor de velocidad de giro para detectar al menos uno de una velocidad de giro de la fuente de motriz (10) , una velocidad de giro del eje de entrada (21d) , o una velocidad de giro del eje de salida (22d) ; y una unidad de control (7) de acuerdo con la reivindicación 1.
3. El vehículo (1) de acuerdo con la reivindicación 2, en el que la unidad de control (7) detecta una anomalía en el sistema de detección de la velocidad del vehículo (42) cuando un valor, que se obtiene dividiendo la velocidad del vehículo entre la velocidad de giro detectada por el sensor de velocidad de giro, se mantiene igual o menor que un valor predeterminado durante un período de tiempo dado.
4. El vehículo (1) de acuerdo con la reivindicación 2 o la reivindicación 3, en el que el sistema de detección de la velocidad del vehículo (42) tiene un sensor de velocidad del vehículo (42a) para detectar una velocidad de giro de la rueda de motriz (3) , y emite una señal de velocidad del vehículo de acuerdo con la velocidad de giro de la rueda de motriz (3) .
5. El vehículo (1) de acuerdo con cualquiera de las reivindicaciones 2 a 4, que comprende además un caballete (9) para la elevación de la rueda de motriz (3) desde el suelo.
6. El vehículo (1) de acuerdo con cualquiera de las reivindicaciones 2 a 5, que comprende además un embrague
(25) situado entre el eje de salida (22d) y la rueda de motriz (3) , estando el embrague (25) embragado o desembragado dependiendo de la velocidad de giro del eje de salida (22d) , en el que el sensor de velocidad de giro detecta una velocidad de giro del eje de salida (22d) , y la velocidad de giro predeterminada es una velocidad de giro a la que el embrague (25) está embragado.
7. El vehículo (1) de acuerdo con cualquiera de las reivindicaciones 2 a 6, que comprende además una bombilla de advertencia (50) , en el que la unidad de control (7) hace que se ilumine o parpadee la bombilla de advertencia (50) , cuando una anomalía es detectada en el sistema de detección de la velocidad del vehículo (42) .
8. El vehículo (1) de acuerdo con cualquiera de las reivindicaciones 2 a 7, en el que tras detectar una anomalía en el sistema de detección de la velocidad del vehículo (42) , la unidad de control (7) detecta que el sistema de detección de la velocidad del vehículo (42) se vuelve normal en base a la señal de velocidad del vehículo emitida desde el sistema de detección de la velocidad del vehículo (42) .
9. El vehículo (1) de acuerdo con cualquiera de las reivindicaciones 2 a 8, que comprende además un embrague
(25) situado entre el eje de salida (22d) y la rueda de motriz (3) , en el que tras la detección de un anomalía en el sistema de detección de la velocidad del vehículo (42) , la unidad de control (7) disminuye una salida de la fuente de motriz (10) si se ha detectado un deslizamiento del embrague (25) .
10. El vehículo (1) de acuerdo con la reivindicación 9, en el que el embrague (25) está embragado o desembragado dependiendo de la velocidad de giro del eje de salida (22d) , y la unidad de control (7) disminuye la salida de la fuente de motriz (10) sólo si la velocidad de giro del eje de salida (22d) es igual o mayor que una velocidad de giro a la que el embrague (25) está embragado.
11. El vehículo (1) de acuerdo con la reivindicación 9 ó 10, que comprende además un regulador para controlar la salida de la fuente de motriz (10) , en el que la unidad de control (7) detecta un deslizamiento del embrague (25) si la velocidad del vehículo es igual o inferior a una velocidad predeterminada del vehículo, y una abertura del regulador se mantiene igual o mayor que una abertura predeterminada durante un período de tiempo dado.
12. El vehículo (1) de acuerdo con la reivindicación 9 ó 10, que comprende además un regulador para controlar la salida de la fuente de motriz (10) , en el que la unidad de control (7) hace que la salida de la fuente de motriz (10) se recupere, después de detectar un deslizamiento del embrague (25) , si la abertura del regulador es igual o menor que la abertura predeterminada o si la velocidad del vehículo es superior a la velocidad predeterminada del vehículo.
13. El vehículo (1) de acuerdo con cualquiera de las reivindicaciones 2 a 12, que comprende además un embrague
(265) situado entre la fuente de motriz (10) y el eje de entrada (21d) , estando el embrague (265) embragado o desembragado dependiendo de la velocidad de giro de la fuente de motriz (10) , en el que el sensor de velocidad de giro detecta una velocidad de giro del eje de salida (22d) , y la velocidad de giro predeterminada es una velocidad de giro a la que el embrague (265) está embragado.
14. El vehículo (1) de acuerdo con una cualquiera de las reivindicaciones 2 a 5, que comprende además un embrague (265) situado entre la fuente de motriz (10) y el eje de entrada (21d) , en el que tras detectar una anomalía en el sistema de detección de la velocidad del vehículo (42) , la unidad de control (7) reduce la salida de la fuente de motriz (10) si se ha detectado un deslizamiento del embrague (265) .
15. El vehículo (1) de acuerdo con la reivindicación 4, en el que el embrague (265) está embragado o desembragado dependiendo de la velocidad de giro del eje de salida (22d) , y la unidad de control (7) disminuye la salida de la fuente de motriz (10) sólo si la velocidad de giro de la fuente de motriz (10) es igual o mayor que una velocidad de giro a la que el embrague (265) está embragado.
16. El vehículo (1) de acuerdo con la reivindicación 14 ó 15, que comprende además un regulador para controlar la salida de la fuente de motriz (10) , la unidad de control (7) detecta un deslizamiento del embrague (265) si la velocidad del vehículo es igual o inferior a una velocidad predeterminada del vehículo, y la abertura del regulador se mantiene igual o mayor que una abertura predeterminada durante un período de tiempo dado.
17. El vehículo (1) de acuerdo con la reivindicación 14 ó 15, que comprende además un regulador para controlar la salida de la fuente de motriz (10) , después de detectar un deslizamiento del embrague (265) , la unidad de control (7) hace que la salida de la fuente de motriz (10) se recupere si la abertura del regulador es igual o menor que la abertura predeterminada o si la velocidad del vehículo es superior a la velocidad predeterminada del vehículo.
18. Un procedimiento para detectar una anomalía en un vehículo (1) que tiene:
una rueda de motriz (3) ; una fuente de motriz (10) para producir una fuerza de giro; una transmisión continuamente variable (20) que tiene un eje de entrada (21d) conectado a la fuente de motriz
(10) y un eje de salida (22d) conectado a la rueda de motriz (3) , en el que una relación de cambio de marchas entre el eje de entrada (21d) y el eje de salida (22d) está controlada electrónicamente; un sistema de detección de la velocidad del vehículo (42) para emitir una señal de velocidad del vehículo; y un sensor de velocidad de giro para detectar al menos uno de una velocidad de giro de la fuente de motriz (10) , una velocidad de giro del eje de entrada (21d) , o una velocidad de giro del eje de salida (22d) ; en el que una anomalía en el sistema de detección de la velocidad del vehículo (42) ha sido detectada independiente de la relación de cambio de marchas en base a la señal de la velocidad del vehículo que se envía desde el sistema de detección de la velocidad del vehículo (42) y al menos uno de una velocidad de giro de la fuente de motriz (10) , una velocidad de giro del eje de entrada (21d) , y una velocidad de giro del eje de salida (22d) ; y una anomalía en el sistema de detección de la velocidad del vehículo (42) ha sido detectada cuando la velocidad de giro detectada por el sensor de velocidad de giro es igual o mayor que una velocidad de giro predeterminada, y ninguna señal de velocidad del vehículo ha sido enviada desde el sistema de detección de velocidad del vehículo (42) durante un período de tiempo dado.
Patentes similares o relacionadas:
Controlador para vehículo y método de control para vehículo, del 10 de Julio de 2019, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un controlador para un vehículo , incluyendo el vehículo un mecanismo de transmisión de variación continua , un mecanismo de transmisión mecánica […]
Sistema de detección de la posición de una caja de velocidades manual, caja de velocidades y método de detección de posición de marcha, del 25 de Enero de 2018, de BITRON INDUSTRIE ESPAÑA S.A.: Sistema de detección de la posición de una caja de velocidades de un vehículo que comprende unos medios magnéticos vinculados con un eje de accionamiento […]
 Sistema de control de embrague para transmisión, del 2 de Abril de 2013, de HONDA MOTOR CO., LTD.: Un sistema de control de embrague para una transmision que tiene una pluralidad de embragues hidraulicos , incluyendo el sistema de control de embrague :
una […]
Sistema de control de embrague para transmisión, del 2 de Abril de 2013, de HONDA MOTOR CO., LTD.: Un sistema de control de embrague para una transmision que tiene una pluralidad de embragues hidraulicos , incluyendo el sistema de control de embrague :
una […]
Sensor de posición de una caja de velocidades, caja de velocidades que incluye tal sensor y procedimiento de detección de la posición del punto muerto de una caja de velocidades de un vehículo automóvil que incluye tal sensor, del 6 de Junio de 2012, de SC2N: Sensor de posición de una caja de velocidades de un vehículo automóvil que incluye una sonda capaz decooperar con una diana móvil unida a un elemento de accionamiento […]
 Aparato de control para mecanismo de transmisión, del 29 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un aparato de control para un mecanismo de transmisión (20a), comprendiendo el mecanismo de transmisión: un eje de entrada , un eje de salida […]
Aparato de control para mecanismo de transmisión, del 29 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un aparato de control para un mecanismo de transmisión (20a), comprendiendo el mecanismo de transmisión: un eje de entrada , un eje de salida […]
PROCEDIMIENTO DE VERIFICACIÓN DEL FUNCIONAMIENTO DE UN DETECTOR DE PUNTO MUERTO DE UNA CAJA DE CAMBIOS DE UN VEHÍCULO AUTÓMOVIL, del 21 de Noviembre de 2011, de PEUGEOT CITROEN AUTOMOBILES SA: Procedimiento de verificación del funcionamiento de un detector de punto muerto (Zona PM) de una caja de cambios de un vehículo de tipo automóvil, […]
 APARATO DE CONTROL DE TRANSMISIÓN AUTOMÁTICA, del 8 de Marzo de 2011, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Aparato de control de transmisión automática incluyendo: un mecanismo de selección de marcha configurado para seleccionar un par de engranajes de cambio […]
APARATO DE CONTROL DE TRANSMISIÓN AUTOMÁTICA, del 8 de Marzo de 2011, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Aparato de control de transmisión automática incluyendo: un mecanismo de selección de marcha configurado para seleccionar un par de engranajes de cambio […]
DISPOSITIVO DE CONTROL DE CAMBIO DE MARCHA Y MOTOCICLETA QUE INCLUYE EL MISMO, del 12 de Julio de 2011, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Dispositivo de control de cambio de marcha que puede montarse en una motocicleta y que incluye un cuerpo y un mecanismo de cambio de marcha […]