SISTEMA DE DETECCION E IDENTIFICACION DE OBSTACULOS EN ENTORNO AEROPORTUARIO.
Sistema de detección e identificación de obstáculos en entorno aeroportuario,
que consta de:
- un sistema de búsqueda de las zonas de ubicación preferente de las estaciones de seguimiento (ES);
- una estación de seguimiento (ES) programable por cada zona de ubicación preferente; y
- una plataforma de gestión (PG) programable dotada de un procesador central.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030332.
Solicitante: IDOM, S.A.U.
Nacionalidad solicitante: España.
Inventor/es: PRIMO LARA,SALVADOR, GOMEZ LISTE,LUIS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S17/89 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 17/00 Sistemas que utilizan la reflexión o rerradiación de ondas electromagnéticas que no sean ondas de radio, p. ej. sistemas lidar. › para la cartografía o la formación de imágenes.
- G01S17/93 G01S 17/00 […] › como anti-colisión.
- G06Q50/00 G […] › G06 CALCULO; CONTEO. › G06Q METODOS O SISTEMAS DE PROCESAMIENTO DE DATOS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO; METODOS O SISTEMAS ESPECIALMENTE ADAPTADOS PARA FINES ADMINISTRATIVOS, COMERCIALES, FINANCIEROS, DE GESTION, DE SUPERVISION O DE PRONOSTICO, NO PREVISTOS EN OTRO LUGAR. › Sistemas o métodos especialmente adaptados para sectores de negocios específicos, p. ej. servicios públicos o turismo (informática para la atención sanitaria G16H).
- G08G5/00 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › Sistemas del control del tráfico aéreo.
Fragmento de la descripción:
Sistema de detección e identificación de obstáculos en entorno aeroportuario.
El objeto del invento es un nuevo sistema de detección e identificación de obstáculos en entornos aeroportuarios.
Las servidumbres aeronáuticas establecen restricciones constructivas en los entornos aeroportuarios con el objeto de garantizar la seguridad de ciertas operaciones aeronáuticas. Uno de los grandes problemas que amenazan la seguridad aeroportuaria es la aparición de obstáculos no controlados que invaden zonas de seguridad.
Si bien existen diversas metodologías que se aplican para la identificación de obstáculos, ninguna de ellas garantiza, con la periodicidad necesaria, la detección de los mismos. La seguridad de las operaciones aeronáuticas está condicionada por la integridad de los datos, en este caso, la relación de obstáculos en las áreas de servidumbres aeronáuticas.
En el actual estado de la técnica, tanto en el mercado nacional como en el internacional, se pone de manifiesto la falta de tecnología de uso comercial que resuelva la necesidad expuesta por lo que el solicitante ha desarrollado el sistema de detección e identificación de obstáculos objeto del invento, que actualiza con periodicidad adecuada la información sobre éstos, facilitando la toma de medidas oportunas en aquellos casos en los que el obstáculo no estuviera controlado. Se caracteriza porque, según el mismo:
- se delimitan una pluralidad de espacios geográficos en el entorno aeroportuario;
- se disponen una pluralidad de estaciones de seguimiento ubicadas en puntos singulares del terreno cubriendo dichos espacios geográficos; yendo dichas estaciones de seguimiento asociadas a una fuente de alimentación y dotadas tanto de equipos de medición distanciométrica mediante impulsos láser y medición angular como de sistemas de telecomunicaciones destinados a la recepción y emisión de datos; y
- se dispone una plataforma de gestión capaz de comunicarse con todas las estaciones de seguimiento y de mostrar información en tiempo real de los diferentes espacios geográficos cubiertos.
La solución desarrollada contempla las diversas tipologías de aeropuertos, su densidad de tráfico, zonas de mayor conflicto y las directrices oficiales establecidas por el Anexo 14 de la OACI y el Anexo 15 de la OACI.
El solicitante ha desarrollado un prototipo del sistema objeto del invento que ha incluido el desarrollo de los trabajos numerados a continuación, y pormenorizados más adelante.
I. Estudio de campo: I.I. Entorno aeroportuario (relieve del terreno, nº de operaciones, presión urbanística y servidumbres aeronáuticas) . I.II. Estudio de equipos comerciales de escáneres terrestre. I.III. Observación de campo con escáner láser. I.IV. Enlace de la observación láser con la Red Geodésica Nacional. I.V. Análisis de los resultados obtenidos. II. Diseño de la lógica de búsqueda de las zonas de máxima sensibilidad. III. Diseño de las Estaciones de Seguimiento (ES de aquí en adelante) . IV. Diseño de la Plataforma de Gestión (PG de aquí en adelante) .Esta solución quedará implementada en cada aeropuerto y su entorno. En los puntos que, a través de la lógica de búsqueda de las zonas de máxima sensibilidad y otros criterios considerados, se implantarán las ES. Las ES llevan a cabo la captura de la geometría del territorio circundante. En cada aeropuerto se implantará una PG, que es la encargada de solicitar a las ES los datos geométricos deseados. Es cada ES la que, una vez capturada esta geometría, mandará la información a la PG, la cual procesa dicha geometría y determina cuando ha de saltar una alarma por posible invasión de una superficie limitadora.
Por ello, el contenido de la presente solicitud constituye un invento nuevo que implica actividad inventiva, y es susceptible de aplicación industrial.
Para comprender mejor el objeto de la presente invención, se representa en los planos una forma preferente de realización práctica, susceptible de cambios accesorios que no desvirtúen su fundamento.
La figura 1 representa el esquema conceptual del sistema de detección e identificación de obstáculos en entornos aeroportuarios, objeto del invento.
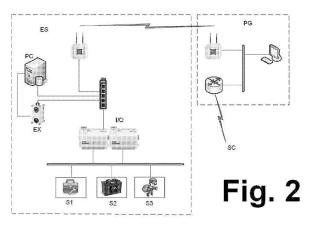
La figura 2 representa el diagrama del subsistema de telecomunicaciones.
La figura 3 representa el diagrama del subsistema de alimentación eléctrica. La línea de puntos delimita los elementos ubicados dentro del cuadro de distribución. Las partes de distinta tensión están separadas por una placa de metal conductor, y esta unida a tierra, según norma IEC EN 60439-1.
La figura 4 representa un diagrama de bloques de toda la secuencia de control de cada subsistema.
La figura 5 representa la suma de los mapas MDAL, MDT, MS, MA, MP, MD y MU que conformará el algoritmo de búsqueda.
Se describe a continuación un ejemplo de realización práctica, no limitativa, del presente invento. No se descartan en absoluto otros modos de realización en los que se introduzcan cambios accesorios que no desvirtúen su fundamento; por el contrario, el presente invento abarca también todas sus variantes.
De conformidad con la invención, el sistema de detección de obstáculos en entornos aeroportuarios:
- delimita una pluralidad de espacios geográficos (1) en el entorno aeroportuario;
- dispone una pluralidad de estaciones de seguimiento (ES) ubicadas en puntos singulares del terreno cubriendo dichos espacios geográficos (1) ;
- dispone una plataforma de gestión (PG) capaz de comunicarse con todas las estaciones de seguimiento (ES) y de mostrar información en tiempo real de los diferentes espacios geográficos (1) cubiertos.
Dichas estaciones de seguimiento (ES) van asociadas a una fuente de alimentación y dotadas tanto de equipos de medición distanciométrica mediante impulsos láser y medición angular como de sistemas de telecomunicaciones destinados a la recepción y emisión de datos.
En el ejemplo de realización descrito, el estudio de campo preliminar permitió la recopilación de la información que dio paso al diseño de los elementos que a continuación se describen, y que conforman en su conjunto el sistema de detección e identificación de obstáculos en entornos aeroportuario objeto del invento.
La lógica de búsqueda de las zonas de máxima sensibilidad es un algoritmo desarrollado para ser incorporado al sistema de detección e identificación de obstáculos objeto del invento y que sirva de ayuda a la decisión de la ubicación de las estaciones de seguimiento (ES) , bien en la fase de implantación del sistema en un entorno aeroportuario o en posteriores fases de ampliación y/o reestructuración de un sistema ya implantado.
La ubicación de las estaciones de seguimiento (ES) ha de ser en zonas altas, lo más próximas a los aeródromos y cubriendo la mayor superficie posible, que sufran el menor apantallamiento posible (mejor visibilidad) , además de otros constreñimientos. Considerando todo ese conjunto de condicionantes, que a continuación se explican de forma literal, se ha diseñado este algoritmo.
Los datos de partida serán:
1. MDAL (Modelo Digital de Alturas Libres) , que será una modelización de las Alturas Libres existentes para cada una de las servidumbres aeronáuticas, o cualquier otra superficie limitadora que se considere, para cada uno de los puntos del terreno. Se entiende como Altura Libre, para un punto del terreno considerado, como la distancia vertical existente entre el terreno (o elemento artificial que pudiera existir) y la superficie limitadora considerada.
2. MDS (Modelo Digital de Superficie) , que será una modelización de las alturas ortométricas del terreno, edificaciones, vías de comunicación y vegetación.
3. Superficies Limitadoras. Será cualquier superficie que se considere que no puede ser penetrada por ningún obstáculo. Entre estas, las más importantes serán las servidumbres aeronáuticas de aeródromo, los planos del obstáculos del 1% y 1, 2% publicados en el AIP, las servidumbres radioeléctricas y las de operaciones.
Este proceso es un cálculo matricial, en el que cada matriz, materializado a través de un fichero ráster, tiene las dimensiones de la porción de territorio que representa, y sus valores corresponden a una discretización de la realidad que quiere representar: MDAL, MDS, Superficie limitadora... o cualquier otro de los eventos que a continuación se describen.
Cada una de estas matrices dividirá el...
Reivindicaciones:
1. Sistema de detección e identificación de obstáculos en entorno aeroportuario, caracterizado porque consta de: a) un sistema de búsqueda de las zonas de ubicación preferente de las estaciones de seguimiento (ES) , b) una estación de seguimiento (ES) programable por cada zona de ubicación preferente que consta de b1) un escáner de medición distanciométrica mediante impulsos láser y mediación angular y b2) medios inteligentes de telecomunicación para la recepción/emisión de datos con c) una plataforma de gestión (PG) programable dotada de un procesador central y que consta de los siguientes módulos c1) módulo de gestión (MGE) de las estaciones de seguimiento (ES) , c2) módulo de servicio de datos central (MSDC) que consta de un banco de datos cartográficos, geodésicos, servi
dumbres aeronáuticas, sombras y apantallamiento del entorno aeroportuario, c3) módulo de detección de obstáculos (MDO) que compara los datos provenientes de las estaciones de seguimiento (ES) con los datos del módulo de servicio de datos central (MSDC) y genera alarmas por la aparición de obstáculos ante la no concordancia en la mencionada comparación de datos del módulo de gestión (MGE) y del módulo de servicio (MSDC) , c4) módulo de visualización y gestión de los geodatos (MVGG) que suministra al usuario la información descriptiva, imagen panorámica, ortoimagen y coordenadas del obstáculo objeto de la alarma.
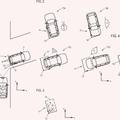
2. Sistema de detección e identificación de obstáculos en entorno aeroportuario, según reivindicación 1, caracterizado porque cada estación de seguimiento (ES) se ubica en puntos singulares del terreno y en ella: a1) el escáner queda guarnecido dentro de un carenado de PRFV; a2) el movimiento horizontal del escáner se ha diseñado mediante un sistema de corona de bolas; a3) el movimiento vertical del escáner se ha diseñado mediante unos fuelles elásticos; a4) dispone una puerta motorizada, accionada por motor y que funciona a través de unas guías para proteger al sistema óptico mientras el equipo no está en funcionamiento.
a5) dispone medios calefactores, que se activan en condiciones de temperatura ambiental adversa; y a6) el carenado va equipado con una estación metereológica y de visibilidad.
3. Sistema de detección e identificación de obstáculos en entorno aeroportuario, según una de las reivindicaciones 1, 2, caracterizado porque cada estación de seguimiento (ES) se implanta en el terreno sobre un hito de hormigón armado y dispone una caseta anexa para albergar el necesario aparataje eléctrico, de computación y de comunicaciones.
4. Sistema de detección e identificación de obstáculos en entorno aeroportuario, según reivindicación 1, caracterizado porque el sistema de telecomunicaciones consta de, al menos, un centro de control remoto (PG) y una o varias estaciones de medida por cada centro de control remoto (PG) ; donde los centros de control remoto (PG) podrán comunicar con un servidor central formando una arquitectura en árbol.
5. Sistema de detección e identificación de obstáculos en entorno aeroportuario, según reivindicación 1, caracterizado porque el sistema de búsqueda de las zonas de ubicación preferente de las estaciones de seguimiento (ES) consta de al menos
a1) un banco de datos (BD) que consta, por cada punto/zona preseleccionado/a (E) del terreno, de datos dispuestos en celdas de a11) los datos (modelo digital de alturas libres) (MDAL) de la modelización de las alturas libres para cada una de las servidumbres aeronáuticas a12) los datos de (modelo digital de superficie) (MDS) de la modelización de las alturas ortométricas a13) los datos de las superficies limitadoras que no pueden ser penetradas por ningún obstáculo, para un mapa de superficies limitadoras (MSL)
a14) datos para un mapa de recorte de sombras) (MRS) en el que se determina que un punto de sombra tiene visibilidad si la cota de superficie limitadora es superior a la cota de la línea de visibilidad del escáner a15) datos de un mapa de apantallamiento (MA) de acuerdo con la normativa de servidumbres aeronáuticas, de modo que si la zona está apantallada tendrá valor0yel resto tendrá valor 1;
a2) un escáner con medios para a21) localizar las zonas de apantallamiento, originándose por cada punto/zona un mapa de sobras compuesto por celdas de valor 1 si hay visibilidady0en caso contrario a22) comparar el mapa de superficies limitadoras (MSL) y el mapa de alturas de visual (MAV) para conocer la distancia vertical, en cada celda, entre la superficie limitadora y el mapa de alturas de visual;
a3) un ordenador que recibe los datos del banco de datos (BD) y del escáner y consta de medios de programa que a31) incluyen un fichero ráster para el cálculo matricial (celdas) de los datos del banco de datos (BD)
a32) comparan el mapa de superficies limitadoras (MSL) y el mapa de alturas de visual (MAV) para conocer la distancia vertical, en cada celda, entre la superficie limitadora y el mapa de alturas de la visual a33) suman el mapa de sombras y el mapa de recortes de sombras originando un mapa de sombras optimizado (MSO) , de modo que si una cota de la superficie limitadora está por encima de la visual del escáner, tendrá valor 1 y las que en la suma pasen a tener valor 2 pasen a valor1yel resto valor 0
a34) suman el mapa de sobras optimizado (MSO) y el mapa de apantallamiento (MA) , determinando que la ubicación preferente definitiva de las estaciones de seguimiento son los puntos/zonas de cálculo mayor.
Patentes similares o relacionadas:
Procedimiento para la detección y localización de un garaje y vehículo, del 6 de Mayo de 2020, de AUDI AG: Procedimiento para la detección y localización de al menos un garaje que ofrezca una plaza de aparcamiento para un vehículo en el vehículo , en donde el vehículo […]
Generador de imágenes y telémetro combinados, del 12 de Febrero de 2020, de Rafael Advanced Defense Systems Ltd: Un vehículo que comprende un generador de imágenes y un telémetro combinados (10A, 10B) que se montan en el vehículo, el generador de imágenes […]
Método para procesar pulsos de eco de un sensor láser 3d activo para proporcionar mediciones de distancia, del 24 de Julio de 2019, de HENSOLDT Sensors GmbH: Un método para procesar pulsos de eco de un sensor 3D activo para proporcionar mediciones de distancia del entorno frente al sensor, que comprende las siguientes […]
Sistema de seguimiento dinámico y método de guiado automático basado en cámaras 3D de tiempo de vuelo, del 3 de Abril de 2019, de Terabee S.A.S: Un sistema [Fig. 1, ] de seguimiento dinámico que comprende: - una cámara [Fig. 1, ] tridimensional basada en tecnología de tiempo […]
 Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor de un sensor situado en un vehículo y vehículo, del 11 de Febrero de 2019, de AUDI AG: Procedimiento para utilizar un dispositivo de procesamiento para datos de sensor como mínimo de un sensor instalado en un vehículo el cual capta objetos […]
Procedimiento y disposición para desarrollar un modelo tridimensional de un entorno, del 13 de Diciembre de 2018, de Vricon Systems Aktiebolag: Procedimiento para desarrollar un modelo 3D de un entorno, que comprende las etapas de: proporcionar una pluralidad de imágenes superpuestas del entorno […]
Luna con campo sensor ópticamente transparente, del 1 de Junio de 2016, de SAINT-GOBAIN GLASS FRANCE: Luna en forma de luna de parabrisas, o bien de una luna trasera de un vehículo, con un campo sensor ópticamente transparente, comprendiendo: a) al menos una […]
 Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]
Procedimiento para determinar una distancia de un objeto a un vehículo automóvil con la utilización de un sensor PMD, del 6 de Enero de 2016, de AUDI AG: Procedimiento para determinar una distancia de un objeto a un vehículo automóvil utilizando un sensor PMD , que comprende las siguientes etapas:
- en un […]